You might also like
- Internal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsFrom EverandInternal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsNo ratings yet
- Parte 4Document18 pagesParte 4João Victor Staub de MeloNo ratings yet
- MF52 EquationManualDocument41 pagesMF52 EquationManualFelipe100% (1)
- Tyre Road Files-M011Document34 pagesTyre Road Files-M011Mohammad Shukri BIn YahyaNo ratings yet
- Modelling Motorcycle Tyre Dynamics on Uneven RoadsDocument11 pagesModelling Motorcycle Tyre Dynamics on Uneven RoadsNINAD PANDENo ratings yet
- Parte 3Document15 pagesParte 3João Victor Staub de MeloNo ratings yet
- Tyre As Car ComponentDocument113 pagesTyre As Car ComponenttsegayNo ratings yet
- Wheel Slip Model 2006 Brach EngineeringDocument10 pagesWheel Slip Model 2006 Brach Engineeringzeca pagodinhoNo ratings yet
- Japanese Porous AsphaltTechnologyDocument51 pagesJapanese Porous AsphaltTechnologyAbdillah AhmadNo ratings yet
- SAE Tyre SlipDocument10 pagesSAE Tyre SlipsammyNo ratings yet
- Traction Magic FormulaDocument7 pagesTraction Magic FormuladeepNo ratings yet
- Recent Advances in Antilock Braking Systems and Traction Control SystemsDocument15 pagesRecent Advances in Antilock Braking Systems and Traction Control Systemsdavid_luzNo ratings yet
- Leichtbau Skript Kroeger Kapitel 5 1 ReifenDocument6 pagesLeichtbau Skript Kroeger Kapitel 5 1 ReifenAlien XNo ratings yet
- Tractor Ballasting in Field Work: A. Janulevičius, K. GiedraDocument8 pagesTractor Ballasting in Field Work: A. Janulevičius, K. GiedraTeresaPeraltaCalvilloNo ratings yet
- Vehicle Braking Parameters InfluencDocument8 pagesVehicle Braking Parameters Influencshariifcqaadir985No ratings yet
- Lu GRE Model Traction ControlDocument6 pagesLu GRE Model Traction ControlТимур РеджеповNo ratings yet
- P782 FinalDocument6 pagesP782 FinalTanmay SenNo ratings yet
- Week 5 TractionDocument8 pagesWeek 5 TractionJaya BerjayaNo ratings yet
- Fet Ci Lecture Notes Prof Fa Kidwai Road DesignDocument114 pagesFet Ci Lecture Notes Prof Fa Kidwai Road DesignMozammil SarwarNo ratings yet
- Vehicle Dynamics: Understanding Forces and PerformanceDocument54 pagesVehicle Dynamics: Understanding Forces and Performanceasitacharya100% (1)
- Effect of Tyre Overload and Inflation PRDocument6 pagesEffect of Tyre Overload and Inflation PRseid negashNo ratings yet
- Frictional EvaluationDocument23 pagesFrictional EvaluationSHIVANSH BAGHELNo ratings yet
- Tyre Report SampleDocument5 pagesTyre Report SampleArka PatraNo ratings yet
- Rolling Resistance Coefficient - An Overview - ScienceDirect TopicsDocument9 pagesRolling Resistance Coefficient - An Overview - ScienceDirect TopicsDevakumarNo ratings yet
- Pacejka 2002 WebPageDocument49 pagesPacejka 2002 WebPagetrisinoNo ratings yet
- PAC2002 Magic-Formula Tire ModelDocument54 pagesPAC2002 Magic-Formula Tire ModelznamNo ratings yet
- Tyre Rolling Resistance - Theoretical BackgroundDocument12 pagesTyre Rolling Resistance - Theoretical BackgroundDupaNo ratings yet
- First Order Tire Dynamics Georg RillDocument10 pagesFirst Order Tire Dynamics Georg RillRichard GreenNo ratings yet
- Tyre ModelsDocument35 pagesTyre ModelsPCezzzNo ratings yet
- HRENG04_Horizontal Alignment_F2FDocument13 pagesHRENG04_Horizontal Alignment_F2FBryanHarold BrooNo ratings yet
- Parametric Study and Experimental EvaluaDocument13 pagesParametric Study and Experimental Evaluamanasbal218No ratings yet
- Interface Roughness Effect On Friction Map Under Fretting Contact ConditionsDocument15 pagesInterface Roughness Effect On Friction Map Under Fretting Contact Conditionskannanmech87No ratings yet
- Vehicle Mathematical Model For The Study of Cornering: January 2012Document12 pagesVehicle Mathematical Model For The Study of Cornering: January 2012Fiorenzo TassottiNo ratings yet
- Adhesion Coefficient of AutomobilDocument5 pagesAdhesion Coefficient of AutomobilShiva JadhaoNo ratings yet
- TA xx52 Waste Toner Forwarding Unit FailDocument17 pagesTA xx52 Waste Toner Forwarding Unit FailJonas100% (4)
- Wheel Loader'S Penetration (Crowd) Force and Impacting FactorsDocument21 pagesWheel Loader'S Penetration (Crowd) Force and Impacting FactorsZahir KhiraNo ratings yet
- Laboratory For TractionDocument13 pagesLaboratory For TractionsiritapeNo ratings yet
- Eng Data Book LlantasDocument84 pagesEng Data Book Llantaslucas ronaldo coronel mendozaNo ratings yet
- Aircraft Antiskid Control via Extremum-Seeking MethodDocument7 pagesAircraft Antiskid Control via Extremum-Seeking MethodPranayNo ratings yet
- Vehicle Cornering Model for Improved HandlingDocument11 pagesVehicle Cornering Model for Improved HandlingRamadan DurakuNo ratings yet
- Port Application Tyres: Technical Data Chart For XL-GRIP Available atDocument2 pagesPort Application Tyres: Technical Data Chart For XL-GRIP Available atRaman AutarNo ratings yet
- Vehicle Mathematical Model For The Study PDFDocument11 pagesVehicle Mathematical Model For The Study PDFAhmadMoaazNo ratings yet
- Chapter 13Document22 pagesChapter 13RohitGupta0% (1)
- Huco Precision CouplingsDocument60 pagesHuco Precision CouplingsMahesh Daxini ThakkerNo ratings yet
- Friction and LubricationDocument16 pagesFriction and Lubricationsaimk shakeelNo ratings yet
- Fundamentals of Vehicle Tire MechanicsDocument5 pagesFundamentals of Vehicle Tire MechanicsNavid HmtiNo ratings yet
- Development Tyres Thermal and Mechanical Tyre Modelling for Handling SimulationDocument6 pagesDevelopment Tyres Thermal and Mechanical Tyre Modelling for Handling SimulationDominic ChengNo ratings yet
- (IV) V S S R L R: Ehicle Teady Tate OAD OAD EquirementsDocument35 pages(IV) V S S R L R: Ehicle Teady Tate OAD OAD EquirementsbabyweiNo ratings yet
- Lecture # 3VDDocument37 pagesLecture # 3VDMustafaNo ratings yet
- Principles of Pavement Design: Structures and TypesDocument57 pagesPrinciples of Pavement Design: Structures and TypesMobin AhmadNo ratings yet
- 39-1 Final Drive Flange SealDocument3 pages39-1 Final Drive Flange SealNilson BarbosaNo ratings yet
- Module 4Document55 pagesModule 4Sayan MondalNo ratings yet
- H6 0 7 0FT PDFDocument8 pagesH6 0 7 0FT PDFwoulkanNo ratings yet
- 08 GVorotovicDocument6 pages08 GVorotovicMiguel Angel Alvarez BoreaNo ratings yet
- Giu 2728 62 15890 2024-02-14T12 22 55-3Document33 pagesGiu 2728 62 15890 2024-02-14T12 22 55-3Yousef DessoukiNo ratings yet
- Racecar DynamicsDocument14 pagesRacecar Dynamicsnemanjatopalovic1992No ratings yet
- Energy Loss TireDocument26 pagesEnergy Loss TiresiritapeNo ratings yet
- TYRE DYNAMICS - Part 1 PDFDocument24 pagesTYRE DYNAMICS - Part 1 PDFManoj ShanmugamNo ratings yet
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsFrom EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsNo ratings yet
- Kerry Cade - Montgomery Bus BoycottDocument3 pagesKerry Cade - Montgomery Bus BoycottKerryNo ratings yet
- Service Manual Trucks: Volvo 5.7, 6.7 Ton Front Axle VTDocument56 pagesService Manual Trucks: Volvo 5.7, 6.7 Ton Front Axle VTErnesto Turpo50% (2)
- DRIVING NC II Assessment Evidence PlanDocument7 pagesDRIVING NC II Assessment Evidence Planmary jane garcinesNo ratings yet
- Marketing News: GRSO900/GRSO900R - Overdrive Gearbox and Power Take-Off EG606Document5 pagesMarketing News: GRSO900/GRSO900R - Overdrive Gearbox and Power Take-Off EG606youssefNo ratings yet
- Minutes of the 7th Regular Session of the 20th City CouncilDocument28 pagesMinutes of the 7th Regular Session of the 20th City CouncilJournal SP DabawNo ratings yet
- JEEP WRANGLER 1988-2005 Igniyion Wire CodesDocument8 pagesJEEP WRANGLER 1988-2005 Igniyion Wire CodesBruce BelvinNo ratings yet
- Bobcat 730sh ManualDocument68 pagesBobcat 730sh ManualAngel Diaz ArenasNo ratings yet
- Earth MovingDocument63 pagesEarth MovingAliNo ratings yet
- History: BMW S1000RR Is A Race OrientedDocument3 pagesHistory: BMW S1000RR Is A Race OrientedVijay VijjuNo ratings yet
- Questionaire MagaliDocument2 pagesQuestionaire Magalielizabeth monasterio100% (4)
- Transpo Case DigestDocument2 pagesTranspo Case DigestQueensy PayabyabNo ratings yet
- 318D, 319D, 320D and 323D Skid Steer Loader Repair (Manual Controls)Document23 pages318D, 319D, 320D and 323D Skid Steer Loader Repair (Manual Controls)Ronald VelascoNo ratings yet
- Crown WT 3000 2311Document440 pagesCrown WT 3000 2311Дмитро Селютін100% (7)
- BT LHM 300Document4 pagesBT LHM 300Laszlo SzatmaryNo ratings yet
- Flexible Pavement Design Calculation Spreadsheet According To AASHTODocument45 pagesFlexible Pavement Design Calculation Spreadsheet According To AASHTOMohammed AL-sharafi100% (2)
- Bajaj Chetak 2011 - 51 - 14Document62 pagesBajaj Chetak 2011 - 51 - 14HARSH AUTO CARESNo ratings yet
- MPR Package - 6 AprilDocument28 pagesMPR Package - 6 AprilRayNo ratings yet
- Design and Fabrication of Two Modes of Steering FinalDocument38 pagesDesign and Fabrication of Two Modes of Steering FinalS18M168 SUJAN BALAJI SNo ratings yet
- DFG/TFG 16 - 50 A/B/C-K: Operating InstructionsDocument142 pagesDFG/TFG 16 - 50 A/B/C-K: Operating InstructionsbenjaminNo ratings yet
- Guide to Subgrade Construction MethodologyDocument4 pagesGuide to Subgrade Construction MethodologysvsrnbNo ratings yet
- 2016 MT03A 서비스메뉴얼B08-F8197-E0Document524 pages2016 MT03A 서비스메뉴얼B08-F8197-E0Don100% (1)
- (Đề thi gồm 12 trang) : Thời gian làm bài: 180 phút (Không kể thời gian giao đề)Document12 pages(Đề thi gồm 12 trang) : Thời gian làm bài: 180 phút (Không kể thời gian giao đề)Productive Mars100% (1)
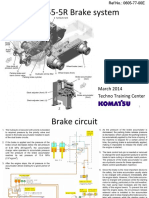
- GD755-5R 06 Brake SystemDocument22 pagesGD755-5R 06 Brake Systemyongki fcNo ratings yet
- Catalogo Suspensiones HutchensDocument25 pagesCatalogo Suspensiones HutchensJorge Wilderd Zamora EscobarNo ratings yet
- 10a AuditDocument47 pages10a AuditMohammed MinhajNo ratings yet
- Linde Service Guide: ArrangementDocument2 pagesLinde Service Guide: ArrangementTrần Đức PhiNo ratings yet
- Lampiran C Spesifikasi AlatDocument4 pagesLampiran C Spesifikasi AlatElva SyukriyatiNo ratings yet
- C172 Checklist (For G1000)Document11 pagesC172 Checklist (For G1000)Alex NgNo ratings yet
- 1389718804497Document114 pages1389718804497Sho HokuNo ratings yet
- Cub Cadet Parts Manual For Model Z Force 48 Kohler 17bf3agvDocument5 pagesCub Cadet Parts Manual For Model Z Force 48 Kohler 17bf3agvirma100% (48)