You might also like
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringFrom EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringNo ratings yet
- Simulate HVDC cables and transmission lines with improved accuracy at low frequenciesDocument7 pagesSimulate HVDC cables and transmission lines with improved accuracy at low frequenciesEmir JusićNo ratings yet
- Semlyen 9842 2834Document9 pagesSemlyen 9842 2834Isai SantanaNo ratings yet
- A Generalized DQ Impedance Model of Three Phase Diode RectifierDocument8 pagesA Generalized DQ Impedance Model of Three Phase Diode RectifierRafael Ruiz SalazarNo ratings yet
- 2Document11 pages2Pacha MamiNo ratings yet
- Modelling of OHL and UG PDFDocument6 pagesModelling of OHL and UG PDFCarlos Lino Rojas AgüeroNo ratings yet
- Transmission Line Modeling For Real-Time Simulations: Maria Isabel Silva Lafaia SimõesDocument8 pagesTransmission Line Modeling For Real-Time Simulations: Maria Isabel Silva Lafaia SimõesjacquelineuniNo ratings yet
- IET Generation Trans Dist - 2021 - Challa - An Algorithm for Fitting Passive Equivalent Circuits for Lumped ParameterDocument14 pagesIET Generation Trans Dist - 2021 - Challa - An Algorithm for Fitting Passive Equivalent Circuits for Lumped Parameterjosdebakker7No ratings yet
- Numerical methods to evaluate EM fields below overhead transmission linesDocument5 pagesNumerical methods to evaluate EM fields below overhead transmission linesingenvictorNo ratings yet
- Synthesis of Lumped Transmission-Line AnalogsDocument13 pagesSynthesis of Lumped Transmission-Line AnalogsIulius LucaNo ratings yet
- an accurate computer methodDocument9 pagesan accurate computer methodsoumenNo ratings yet
- Simulation of Transients With A Modal-DomainDocument8 pagesSimulation of Transients With A Modal-DomainRiyadh ZakiNo ratings yet
- Caballero PT 2014 PDFDocument7 pagesCaballero PT 2014 PDFMau Gar EcNo ratings yet
- Input Impedance Analysis of Single-Phase PFC ConvertersDocument7 pagesInput Impedance Analysis of Single-Phase PFC Convertersthirawad.sNo ratings yet
- Harmonic Elimination in VSC HVDC System Using SHE-PWM: B. R K, K. M R, G. V S BDocument5 pagesHarmonic Elimination in VSC HVDC System Using SHE-PWM: B. R K, K. M R, G. V S BMYNAMENo ratings yet
- New Investigations On The Method of Characteristics For The Evaluation of Line TransientsDocument6 pagesNew Investigations On The Method of Characteristics For The Evaluation of Line TransientsAndersonNo ratings yet
- Scattering Parameter Transient Analysis of Transmission Lines Loaded With Nonlinear TerminationsDocument8 pagesScattering Parameter Transient Analysis of Transmission Lines Loaded With Nonlinear TerminationsIoan TudosaNo ratings yet
- 411 Yang-An Efficient Neural Network Macro-Model For Electromagnetic Radiation Spurious Emission Ab982Document3 pages411 Yang-An Efficient Neural Network Macro-Model For Electromagnetic Radiation Spurious Emission Ab982Τσιμπινός ΣπύροςNo ratings yet
- Generalized Discontinuous DC-link Balancing Modulation Strategy For Three-Level InvertersDocument8 pagesGeneralized Discontinuous DC-link Balancing Modulation Strategy For Three-Level Invertersmeistehaft270No ratings yet
- Calculating The Current Distribution in Power TranDocument7 pagesCalculating The Current Distribution in Power TranEmal NiaziNo ratings yet
- Gustav Sen 2004Document9 pagesGustav Sen 2004Felipe Mafioletti SchuartzNo ratings yet
- A Generalized Approach For MultifrequencyDocument14 pagesA Generalized Approach For MultifrequencyJose Antonio Garcia PerezNo ratings yet
- Ration Approximization of Time Domain PDFDocument10 pagesRation Approximization of Time Domain PDFalessio8No ratings yet
- 1979 - Kasturi - Computation of Impulse-Voltage Stresses in Transformer WindingsDocument4 pages1979 - Kasturi - Computation of Impulse-Voltage Stresses in Transformer WindingsLa Za DaNo ratings yet
- Application of Matrix Methods To The Solution of Travelling-Wave Phenomena in Polyphase SystemsDocument13 pagesApplication of Matrix Methods To The Solution of Travelling-Wave Phenomena in Polyphase SystemsKunal RajaNo ratings yet
- Transmissionline PscadDocument3 pagesTransmissionline PscadSrikanth KhandavalliNo ratings yet
- PTCaballero CLAGTEEDocument6 pagesPTCaballero CLAGTEEMau Gar EcNo ratings yet
- G. Anderson G. Liss 1991 Improving Voltage Stability in Power Systems With HVDCDocument6 pagesG. Anderson G. Liss 1991 Improving Voltage Stability in Power Systems With HVDCFelix GamarraNo ratings yet
- Effects of Series Capacitors in Transmission Lines: A. A. JOHJL& N-J.E. BarkleDocument3 pagesEffects of Series Capacitors in Transmission Lines: A. A. JOHJL& N-J.E. BarklehuamanahuiNo ratings yet
- Detailed Model Parameters Estimation of Transformer HV Winding Based On Neural NetworksDocument6 pagesDetailed Model Parameters Estimation of Transformer HV Winding Based On Neural NetworksTransformadores Eléctricos - Omar BarbosaNo ratings yet
- Comparison of HVDC Line Models in PSB Simulink BasedDocument6 pagesComparison of HVDC Line Models in PSB Simulink BasedAlan DrewNo ratings yet
- Analytical Models For Low-Power Rectenna DesignDocument4 pagesAnalytical Models For Low-Power Rectenna DesignmoonyraNo ratings yet
- Aredes2004 Article StaticSeriesCompensatorsApplieDocument8 pagesAredes2004 Article StaticSeriesCompensatorsApplieRODRIGUEZ CRISTOBAL JUAN JHIAMPIERNo ratings yet
- Simulation of Transients in Unerground Cables With Frequency Dependent ModalDocument12 pagesSimulation of Transients in Unerground Cables With Frequency Dependent ModalMadhusudhan Srinivasan100% (1)
- Modeling of Coplanar Waveguide Meander-LineInductorsDocument10 pagesModeling of Coplanar Waveguide Meander-LineInductorsalisazidNo ratings yet
- HP-AN1304-2 - Time Domain Reflectometry TheoryDocument17 pagesHP-AN1304-2 - Time Domain Reflectometry Theorysirjole7584No ratings yet
- Matrix Converter Modulation Strategies: A New General Approach Based On Space-Vector Representation of The Switch StateDocument1 pageMatrix Converter Modulation Strategies: A New General Approach Based On Space-Vector Representation of The Switch StatevainateyagoldarNo ratings yet
- A Linear Kronig-Kramers Transform Test for Validating Immittance DataDocument11 pagesA Linear Kronig-Kramers Transform Test for Validating Immittance DatatrieshaNo ratings yet
- Digitized Feedforward Compensation Method For High Power Density Three-Phase VIENNA PFC ConverterDocument6 pagesDigitized Feedforward Compensation Method For High Power Density Three-Phase VIENNA PFC Convertergerson gomesNo ratings yet
- An Adaptive Fault Location Scheme for Aged Power CablesDocument7 pagesAn Adaptive Fault Location Scheme for Aged Power CablesMani AshouriNo ratings yet
- Feed-Forward Control of An HVDC Power Transmission NetworkDocument10 pagesFeed-Forward Control of An HVDC Power Transmission NetworkMani AshouriNo ratings yet
- Ieee Transactions Apparatus and Systems, Vol. PAS-97, No. 5, 1978 1607Document11 pagesIeee Transactions Apparatus and Systems, Vol. PAS-97, No. 5, 1978 1607Mauricio AndradeNo ratings yet
- Hari Charan Nannam, Atanu Banerjee: Abstract - in This Paper, Modeling and Principle ofDocument5 pagesHari Charan Nannam, Atanu Banerjee: Abstract - in This Paper, Modeling and Principle ofGabriel VilknNo ratings yet
- Network Model of The Constant Phase Element: A Project ByDocument11 pagesNetwork Model of The Constant Phase Element: A Project ByShreyas BhandareNo ratings yet
- Mendalek Controle Não Linear PDFDocument6 pagesMendalek Controle Não Linear PDFEdsonNo ratings yet
- Budner 1970Document10 pagesBudner 1970Joyce SouzaNo ratings yet
- Mentre 1994mentre 1994Document12 pagesMentre 1994mentre 1994Obatai KhanNo ratings yet
- 2007 Nonis TCAS CML Divider DesignDocument10 pages2007 Nonis TCAS CML Divider DesignDavidNo ratings yet
- Symphatetic Inrush Kumbhar2007Document6 pagesSymphatetic Inrush Kumbhar2007Anonymous BBX2E87aHNo ratings yet
- Hybrid PWM Strategy of SVPWM and VSVPWM For NPC Three-Level Voltage-Source InverterDocument13 pagesHybrid PWM Strategy of SVPWM and VSVPWM For NPC Three-Level Voltage-Source InverterANKIT PRAJAPATINo ratings yet
- Jsaer2014 01 02 44 54Document11 pagesJsaer2014 01 02 44 54jsaereditorNo ratings yet
- A New Frequency-Dependent Surge Impedance Calculation Method For High-Voltage TowersDocument8 pagesA New Frequency-Dependent Surge Impedance Calculation Method For High-Voltage TowersWaseemNo ratings yet
- Using Modal Analysis To Estimate Received Signal Levels For A Power-Line CarrierDocument9 pagesUsing Modal Analysis To Estimate Received Signal Levels For A Power-Line CarrierHugh cabNo ratings yet
- A Large Air Gap 3kW Wireless Power Transfer System For Electric VehDocument6 pagesA Large Air Gap 3kW Wireless Power Transfer System For Electric VehbalafetNo ratings yet
- Editorje Journal Editor 37 - 46Document10 pagesEditorje Journal Editor 37 - 46MuhammadFajarBaskoroNo ratings yet
- Ground Fault Over VoltagesDocument7 pagesGround Fault Over Voltagespistola2No ratings yet
- (Faria) A Theoretcial Analys of TH Propagation Properties of TH Twisted-Pair Runnin Abov A Ground Plane 2003 s00202-002-0147-1Document6 pages(Faria) A Theoretcial Analys of TH Propagation Properties of TH Twisted-Pair Runnin Abov A Ground Plane 2003 s00202-002-0147-1jffm7147No ratings yet
- Effect of Earth Current Return Model OnDocument5 pagesEffect of Earth Current Return Model Onshawnr7376No ratings yet
- Design of IEC 61850 Based Substation Automation Systems According To Customer RequirementsDocument8 pagesDesign of IEC 61850 Based Substation Automation Systems According To Customer Requirementsjohnny SalazarNo ratings yet
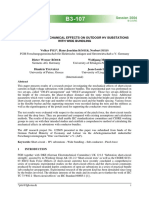
- B3 107 Cigre Sesion 2004Document8 pagesB3 107 Cigre Sesion 2004johnny SalazarNo ratings yet
- Decommissioning Obsolete Power Plants Why Do It NowDocument5 pagesDecommissioning Obsolete Power Plants Why Do It Nowjohnny SalazarNo ratings yet
- BE1Num FeaturesDocument1 pageBE1Num Featuresjohnny SalazarNo ratings yet
- Reduced Ground Resistance and Improved Protection with SAN-EARTHDocument7 pagesReduced Ground Resistance and Improved Protection with SAN-EARTHjohnny SalazarNo ratings yet
- Unclassified DSTI/SU/SC (2014) 14/FINAL: 17-Feb-2015 English - Or. English Steel CommitteeDocument34 pagesUnclassified DSTI/SU/SC (2014) 14/FINAL: 17-Feb-2015 English - Or. English Steel Committeejohnny SalazarNo ratings yet
- CLEAN ENERGY HANDBOOK FOR FINANCIAL INSTITUTIONSDocument227 pagesCLEAN ENERGY HANDBOOK FOR FINANCIAL INSTITUTIONSjohnny Salazar100% (1)
- C2e2 Report LacDocument78 pagesC2e2 Report Lacjohnny SalazarNo ratings yet
- BNEF Clean Energy Investment Investment Trends 2017Document76 pagesBNEF Clean Energy Investment Investment Trends 2017johnny SalazarNo ratings yet
- BNEF Clean Energy Investment Investment Trends 2017Document76 pagesBNEF Clean Energy Investment Investment Trends 2017johnny SalazarNo ratings yet
- Udegbe MS ThesisDocument132 pagesUdegbe MS Thesisjohnny SalazarNo ratings yet
- Advancing Ren21 2018 PDFDocument52 pagesAdvancing Ren21 2018 PDFJesus Alberto GonzalezNo ratings yet
- Overview of Storage TechnologiesDocument163 pagesOverview of Storage Technologiesjohnny SalazarNo ratings yet
- Energy Storage:: Opportunities & ChallengesDocument19 pagesEnergy Storage:: Opportunities & ChallengesJohnny FreedNo ratings yet
- Electrical Power and Energy Systems: Ehsan Reihani, Saeed Sepasi, Leon R. Roose, Marc MatsuuraDocument8 pagesElectrical Power and Energy Systems: Ehsan Reihani, Saeed Sepasi, Leon R. Roose, Marc Matsuurajohnny SalazarNo ratings yet
- Case Study: Eaton Wadeville Microgrid: © 2018 Eaton. All Rights ReservedDocument20 pagesCase Study: Eaton Wadeville Microgrid: © 2018 Eaton. All Rights Reservedjohnny SalazarNo ratings yet
- ABB Delivers First Urban Battery StorageDocument1 pageABB Delivers First Urban Battery Storagejohnny SalazarNo ratings yet
- 4 sem Electricity & MagnetismDocument4 pages4 sem Electricity & Magnetism1singavarapusrichandraNo ratings yet
- Properties of Copper and Copper AlloysDocument1 pageProperties of Copper and Copper Alloysankesh_ghoghariNo ratings yet
- Handbook For Sound Engineers PDF - 8993935 PDFDocument7 pagesHandbook For Sound Engineers PDF - 8993935 PDFJooNo ratings yet
- UPS - 1 - 3kVA - VRLA - Spec SheetDocument7 pagesUPS - 1 - 3kVA - VRLA - Spec SheetVictor JuarezNo ratings yet
- 1946 20phonographDocument4 pages1946 20phonographnewyork167No ratings yet
- OverUnity Lead Acid Battery Switching Circuit - Self Battery ChargingDocument8 pagesOverUnity Lead Acid Battery Switching Circuit - Self Battery ChargingpranalarNo ratings yet
- Rohs Compliant: NotesDocument1 pageRohs Compliant: NotesRamNo ratings yet
- Fotoforo WelchAllynDocument10 pagesFotoforo WelchAllynDuban GuerreroNo ratings yet
- Table 2.2: The Average Gas Bubble Size From Various Electrodes at Different Current DensityDocument100 pagesTable 2.2: The Average Gas Bubble Size From Various Electrodes at Different Current DensityBastian GuevaraNo ratings yet
- Active-Filter CookbookDocument243 pagesActive-Filter CookbookName100% (1)
- Dual-Phase Synchronous-Rectified Buck Controller General DescriptionDocument23 pagesDual-Phase Synchronous-Rectified Buck Controller General DescriptionBabei IlieNo ratings yet
- Service Manual: Fm/Am Compact Disc PlayerDocument40 pagesService Manual: Fm/Am Compact Disc PlayerClaudio José PintoNo ratings yet
- Cons Trucci On TelmexDocument68 pagesCons Trucci On TelmexGjurinovic Enriquez GotNo ratings yet
- Halla Xpress: The Most Sought-After Luminaires in StockDocument9 pagesHalla Xpress: The Most Sought-After Luminaires in StockAlberto TorresNo ratings yet
- E07-X01 - 2 Standby Diesel Gen. 480 & 4160V Data SheetDocument3 pagesE07-X01 - 2 Standby Diesel Gen. 480 & 4160V Data SheetMuhammad IrfanNo ratings yet
- FC400-EIP Quick ManualDocument8 pagesFC400-EIP Quick ManualShreya SableNo ratings yet
- Concise Operating Instructions: Frequency Converter For HOISTING - TRAVEL (Siemens)Document9 pagesConcise Operating Instructions: Frequency Converter For HOISTING - TRAVEL (Siemens)Pablo Hidalgo ValenzuelaNo ratings yet
- Kema B.V. High Power Laboratory and High Voltage LaboratoryDocument9 pagesKema B.V. High Power Laboratory and High Voltage LaboratoryFranciscoUrgilesNo ratings yet
- Acuvim II Power Meter User Manual 1040E1303Document305 pagesAcuvim II Power Meter User Manual 1040E1303Natan HernandezNo ratings yet
- Manual PROFIBUS Repeater OZD Profi 12MDocument40 pagesManual PROFIBUS Repeater OZD Profi 12MpatrickNo ratings yet
- NATIONAL GRID SAFETY RULES TEXTBOOKDocument277 pagesNATIONAL GRID SAFETY RULES TEXTBOOKYARANo ratings yet
- Electromagnetics VITDocument3 pagesElectromagnetics VITDivAkar KalraNo ratings yet
- DC Generator ProjectDocument10 pagesDC Generator ProjectMuhammad Asif Iqbal43% (7)
- Parrarayos Azl PDFDocument6 pagesParrarayos Azl PDFJorge HBNo ratings yet
- Test & Tag Reading Material V1 - 1 Mar 2017Document10 pagesTest & Tag Reading Material V1 - 1 Mar 2017Pham Thanh PhucNo ratings yet
- Ergoplus 400: Mig Welding (Gmaw)Document2 pagesErgoplus 400: Mig Welding (Gmaw)Стефан АнтонићNo ratings yet
- Nikola TeslaDocument4 pagesNikola TeslaRhiannon GoetzNo ratings yet
- Manual Stamford Avr MX342 PDFDocument4 pagesManual Stamford Avr MX342 PDFSeVictor Rudas CajaNo ratings yet
- Voltage Regulator TAPCON® 250: Operating Instructions 297/06Document144 pagesVoltage Regulator TAPCON® 250: Operating Instructions 297/06Melchor DavidNo ratings yet
- Single Phase Controlled RectifierDocument49 pagesSingle Phase Controlled RectifierTuhin ShahNo ratings yet