You might also like
- Calculating the Height of an Inaccessible Point QRDocument11 pagesCalculating the Height of an Inaccessible Point QRSantiago dewitNo ratings yet
- Some Important Formulae, Definitions and Results in MathematicsDocument12 pagesSome Important Formulae, Definitions and Results in Mathematicsparchure123No ratings yet
- Lec 2bbbDocument21 pagesLec 2bbbNAZIM UR RAHMAN Civil EngineeringNo ratings yet
- Set 18 Solution ReviewedDocument14 pagesSet 18 Solution ReviewedMuhammad SuleetNo ratings yet
- Integral Calculus PresentationDocument23 pagesIntegral Calculus PresentationAllan BautistaNo ratings yet
- Function Part 2Document40 pagesFunction Part 2Muhd HafidzNo ratings yet
- High Voltage Engineering Lec2Document14 pagesHigh Voltage Engineering Lec2nasirvivacNo ratings yet
- Iit Jee TRIGNOMETRY FORMULAS2.0Document16 pagesIit Jee TRIGNOMETRY FORMULAS2.0ARYAN SINGHNo ratings yet
- Discrete Time Random Processes: 4.1 (A) UsingDocument16 pagesDiscrete Time Random Processes: 4.1 (A) UsingSudipta GhoshNo ratings yet
- Solutions To Home Practice Test/Mathematics: Circles HWT - 1Document6 pagesSolutions To Home Practice Test/Mathematics: Circles HWT - 1varunkohliinNo ratings yet
- Modeling Systems in the Frequency DomainDocument45 pagesModeling Systems in the Frequency Domain黃聖傑No ratings yet
- "Trigon" Triangle +"metry" Measurement Trigonometry: Review of Trigonometry For CalculusDocument10 pages"Trigon" Triangle +"metry" Measurement Trigonometry: Review of Trigonometry For CalculusAbdulaziz MohammedNo ratings yet
- Discrete Random Variables and Probability DistributionsDocument36 pagesDiscrete Random Variables and Probability DistributionskashishnagpalNo ratings yet
- Circle Drawing Algorithms: Four Methods ExplainedDocument36 pagesCircle Drawing Algorithms: Four Methods ExplainedKashish KansalNo ratings yet
- Solution Manual For Modern Quantum Mechanics 2nd Edition by SakuraiDocument13 pagesSolution Manual For Modern Quantum Mechanics 2nd Edition by SakuraiRyo Kinase36% (14)
- Solutions Classical Dynamics of Particles and Systems 5edDocument496 pagesSolutions Classical Dynamics of Particles and Systems 5edRicardo Vega100% (6)
- 6 - Momento 4Document23 pages6 - Momento 4Carlos CedielNo ratings yet
- MATHS Trigonometric FormulaeDocument9 pagesMATHS Trigonometric FormulaeMahesh AbnaveNo ratings yet
- Lecture 4 (Compatibility Mode)Document26 pagesLecture 4 (Compatibility Mode)Anonymous dGnj3bZNo ratings yet
- Chem 373 - Lecture 38: Selection RulesDocument28 pagesChem 373 - Lecture 38: Selection RulesNuansak3No ratings yet
- Test2 - Sem1 - 15 - 16 SOLUTIONDocument3 pagesTest2 - Sem1 - 15 - 16 SOLUTIONlolipopNo ratings yet
- Quantum Mechanics - Homework Assignment 3: Alejandro G Omez Espinosa October 8, 2012Document7 pagesQuantum Mechanics - Homework Assignment 3: Alejandro G Omez Espinosa October 8, 2012Ale GomezNo ratings yet
- System Simulation Using Matlab, State Plane PlotsDocument7 pagesSystem Simulation Using Matlab, State Plane PlotsmosictrlNo ratings yet
- QM1 Problem Set 1 Solutions - Mike SaelimDocument5 pagesQM1 Problem Set 1 Solutions - Mike SaelimryzesyaaNo ratings yet
- Chapter8s 1-UnlockedDocument19 pagesChapter8s 1-Unlockedjohn wallaceNo ratings yet
- Anna's AssignmentDocument16 pagesAnna's Assignmenttumaini murrayNo ratings yet
- Appendix D Basic Basic Engineering Engineering Calculations CalculationsDocument25 pagesAppendix D Basic Basic Engineering Engineering Calculations CalculationsaakashtrivediNo ratings yet
- Maths Concepts and Formulae GuideDocument16 pagesMaths Concepts and Formulae GuideAt TanwiNo ratings yet
- Analytic Geometry Key ConceptsDocument45 pagesAnalytic Geometry Key Conceptslynser chuaNo ratings yet
- Math 102 - L1 - Sp24Document48 pagesMath 102 - L1 - Sp24ze44666No ratings yet
- Notes MathDocument4 pagesNotes MathNaveed Atta UllahNo ratings yet
- Analytic Geometry 2019 - JKCG - Lecture (Final)Document133 pagesAnalytic Geometry 2019 - JKCG - Lecture (Final)Edward RamosNo ratings yet
- Rayleigh Ritz MethodDocument7 pagesRayleigh Ritz Methodrameshbabu_197963% (8)
- Circular Functions GraphsDocument15 pagesCircular Functions GraphsEric MoralesNo ratings yet
- LinkagesDocument29 pagesLinkagesRubén GonzálezNo ratings yet
- Essential Trigonometry ConceptsDocument23 pagesEssential Trigonometry ConceptsTitis PohanNo ratings yet
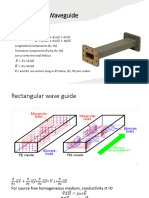
- Rectangular WaveguideDocument24 pagesRectangular WaveguidethiyagupsgNo ratings yet
- Orbital Mechanics MATLAB Lambert's ProblemDocument24 pagesOrbital Mechanics MATLAB Lambert's ProblempclaudeNo ratings yet
- Formula Sheet Algebra 2 TrigDocument4 pagesFormula Sheet Algebra 2 TrigfrancescoabcNo ratings yet
- Mechanics of Solids Week 10 LecturesDocument9 pagesMechanics of Solids Week 10 LecturesFlynn GouldNo ratings yet
- Basic Maths FormulaeDocument10 pagesBasic Maths FormulaeAns DevNo ratings yet
- Modeling Transformations: 2D Transformations 3D Transformations Opengl TransformationDocument69 pagesModeling Transformations: 2D Transformations 3D Transformations Opengl TransformationImran HayderNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Transformation of Axes (Geometry) Mathematics Question BankFrom EverandTransformation of Axes (Geometry) Mathematics Question BankRating: 3 out of 5 stars3/5 (1)
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Analytic Geometry: Graphic Solutions Using Matlab LanguageFrom EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageNo ratings yet
- Advanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandAdvanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYFrom EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo ratings yet
- Mors MobileDocument1 pageMors MobileAhmed AhmedNo ratings yet
- Position Analysis ExercicesDocument1 pagePosition Analysis ExercicesAhmed AhmedNo ratings yet
- Codes PossiblesDocument4 pagesCodes PossiblesAhmed AhmedNo ratings yet
- TP CAO EsquisseDocument7 pagesTP CAO EsquisseAhmed AhmedNo ratings yet
- Exercices TP CAO Part 3DDocument16 pagesExercices TP CAO Part 3DAhmed AhmedNo ratings yet
- Lecture 20Document29 pagesLecture 20Axel Coronado PopperNo ratings yet
- Effects of Changing Climate On Weather and Human Activities PDFDocument50 pagesEffects of Changing Climate On Weather and Human Activities PDFpawlittooNo ratings yet
- Simplified Method For Predicting Photovoltaic Array OutputDocument6 pagesSimplified Method For Predicting Photovoltaic Array OutputAlfi SeptandhiNo ratings yet
- 1 - 287 - LR706 East African Flood ModelDocument45 pages1 - 287 - LR706 East African Flood ModelAKASH FERAG83% (6)
- Da40 Poh PDFDocument300 pagesDa40 Poh PDFChris PetersenNo ratings yet
- F Fatigue Analysis of A LUG Atigue Analysis of A LUG Assembly AssemblyDocument14 pagesF Fatigue Analysis of A LUG Atigue Analysis of A LUG Assembly Assemblyandry4jcNo ratings yet
- Influence of Compacted Hydrophobic and Hydrophilic Colloidal Silicon Dioxide On Tableting Properties of Pharmaceutical ExcipientsDocument11 pagesInfluence of Compacted Hydrophobic and Hydrophilic Colloidal Silicon Dioxide On Tableting Properties of Pharmaceutical ExcipientsJenny Alexandra Santamaria MaldonadoNo ratings yet
- Experimental PhysicsDocument444 pagesExperimental PhysicsJerome MeccaNo ratings yet
- Q034-May-18 ASI Timas Survey ServicesDocument19 pagesQ034-May-18 ASI Timas Survey ServicesAulia AkbarNo ratings yet
- Candappa 2001Document7 pagesCandappa 2001LeonardoMadeira11No ratings yet
- AssignmentDocument6 pagesAssignmentramsha zulfiqarNo ratings yet
- Ghosh2015 PDFDocument89 pagesGhosh2015 PDFAnonymous rUr4olUNo ratings yet
- 2023 - Stage 3 - P2 - MSDocument10 pages2023 - Stage 3 - P2 - MSCarla Casallas100% (1)
- 2.2.46. Chromatographic Separation Techniques PDFDocument5 pages2.2.46. Chromatographic Separation Techniques PDFhamidNo ratings yet
- Lecture1 ALLDocument35 pagesLecture1 ALLadeelyjNo ratings yet
- Bladed Hardware Test User ManualDocument69 pagesBladed Hardware Test User ManualenerconNo ratings yet
- UPCAT Math Topics Algebra Geometry Trigonometry StatisticsDocument6 pagesUPCAT Math Topics Algebra Geometry Trigonometry StatisticsAndre Mikhail SerraNo ratings yet
- A Brief Description of Steel Rolling Mill ProcessDocument2 pagesA Brief Description of Steel Rolling Mill ProcessChuks NwaniNo ratings yet
- AL Guide Accuload 3Document2 pagesAL Guide Accuload 3Bryam HuamanchumoNo ratings yet
- 2.1.2.a Beamdeflection 2Document7 pages2.1.2.a Beamdeflection 2Bailey RodriguezNo ratings yet
- Test Results Report Rhino Wood RepairDocument10 pagesTest Results Report Rhino Wood Repairmidzi24No ratings yet
- Table of contents FABA 100 systemDocument111 pagesTable of contents FABA 100 systemJESUSCALVILLONo ratings yet
- 2010 Commencement ProgramDocument73 pages2010 Commencement Programpearldrop1No ratings yet
- # 1. Neet 2017 - Physics - Chapter 11 Kinetic TheoryDocument19 pages# 1. Neet 2017 - Physics - Chapter 11 Kinetic TheoryTamilaruviNo ratings yet
- Science Lesson - Fixed PulleysDocument4 pagesScience Lesson - Fixed Pulleysapi-491433072No ratings yet
- Reproducibility Crisis?: Is There ADocument3 pagesReproducibility Crisis?: Is There AIoannis PanagopoulosNo ratings yet
- Catalogue Fans DrivesDocument60 pagesCatalogue Fans DrivesFernando MouraNo ratings yet
- Steel Rivets and Bars For Rivets, Pressure VesselsDocument4 pagesSteel Rivets and Bars For Rivets, Pressure VesselsxaviereduardoNo ratings yet
- Silicene: Michelle J.S. Spencer Tetsuya Morishita EditorsDocument283 pagesSilicene: Michelle J.S. Spencer Tetsuya Morishita EditorsPedro Vieira100% (1)
- Ac AssignmentDocument3 pagesAc AssignmentAditya GuptaNo ratings yet