You might also like
- Design and Analysis of P&O and IP&O MPPT Techniques For Photovoltaic SystemDocument7 pagesDesign and Analysis of P&O and IP&O MPPT Techniques For Photovoltaic SystemIJMERNo ratings yet
- Comparative Study of P&O and Inc MPPT AlgorithmsDocument7 pagesComparative Study of P&O and Inc MPPT AlgorithmsAJER JOURNALNo ratings yet
- Current Fed Full-Bridge Converter With Voltage Doubler For Photovoltaic System ApplicationsDocument6 pagesCurrent Fed Full-Bridge Converter With Voltage Doubler For Photovoltaic System Applicationsali ghalibNo ratings yet
- Maximum Power Point Tracking For Photovoltaic Optimization Using Ripple-Based Extremum Seeking ControlDocument20 pagesMaximum Power Point Tracking For Photovoltaic Optimization Using Ripple-Based Extremum Seeking Controlnehaadhikari87No ratings yet
- MPPT Algorithm For PVDocument6 pagesMPPT Algorithm For PVSubhrajit PaulNo ratings yet
- Modeling and simulating PV arraysDocument11 pagesModeling and simulating PV arraysnavidelecNo ratings yet
- Novel Maximum Power Point Tracking With Classical Cascaded Voltage and Current Loops For Photovoltaic SystemsDocument5 pagesNovel Maximum Power Point Tracking With Classical Cascaded Voltage and Current Loops For Photovoltaic SystemsSeth HarrisNo ratings yet
- SSModel PowerFlow PV IEEE PDFDocument6 pagesSSModel PowerFlow PV IEEE PDFJesus Castañon AlcalaNo ratings yet
- Steady-State Model and Power Flow Analysis of GridDocument7 pagesSteady-State Model and Power Flow Analysis of GridAgostino MilaneseNo ratings yet
- A Seven Level Inverter Using A Solar Power Generation SystemDocument7 pagesA Seven Level Inverter Using A Solar Power Generation Systemsasitharan33No ratings yet
- Soft Switching Buck Converter For Battery Charging With MPPTDocument7 pagesSoft Switching Buck Converter For Battery Charging With MPPTVenkanna BodigeNo ratings yet
- Modeling and Simulation of PV Array and Its Performance Enhancement Using MPPT (P&O) TechniqueDocument8 pagesModeling and Simulation of PV Array and Its Performance Enhancement Using MPPT (P&O) Techniqueeditor9891No ratings yet
- MPPT AlgorithmDocument7 pagesMPPT AlgorithmVishnu Kumar NadarNo ratings yet
- Solar PVDocument8 pagesSolar PVmurthy237No ratings yet
- Comparative Study of P&O and InC MPPT AlgorithmsDocument7 pagesComparative Study of P&O and InC MPPT AlgorithmsVinod KohliNo ratings yet
- Maximum Power Point Tracking Controller For Photovoltaic System Using Sliding Mode ControlDocument5 pagesMaximum Power Point Tracking Controller For Photovoltaic System Using Sliding Mode Controlt.benaissaNo ratings yet
- Matlab/Simulink-Based Research On Maximum Power Point Tracking of Photovoltaic GenerationDocument9 pagesMatlab/Simulink-Based Research On Maximum Power Point Tracking of Photovoltaic GenerationOnselwojoud MouniNo ratings yet
- 2023 ARTICLE, PV System With Battery Storage Using Bidirectional DC-DC ConverterDocument11 pages2023 ARTICLE, PV System With Battery Storage Using Bidirectional DC-DC ConverterlcordobaNo ratings yet
- Backstepping Controller Design To Track Maximum Power in Photovoltaic SystemsDocument10 pagesBackstepping Controller Design To Track Maximum Power in Photovoltaic SystemsalgNo ratings yet
- 5 Lekshmy Rajan Performance Analysis of MaximumDocument6 pages5 Lekshmy Rajan Performance Analysis of MaximumVishal KevatNo ratings yet
- Maximum Power Point Tracking Using Modified Incremental Conductance For Solar Photovoltaic SystemDocument5 pagesMaximum Power Point Tracking Using Modified Incremental Conductance For Solar Photovoltaic SystemHaymanot LegesseNo ratings yet
- Grid Interactive PV System With Harmonic and Reactive Power Compensation Features Using A Novel Fuzzy Logic Based MPPTDocument6 pagesGrid Interactive PV System With Harmonic and Reactive Power Compensation Features Using A Novel Fuzzy Logic Based MPPTvinay kumarNo ratings yet
- An Improved Maximum Power Point Tracking Controller For PV Systems Using Artificial Neural NetworkDocument6 pagesAn Improved Maximum Power Point Tracking Controller For PV Systems Using Artificial Neural NetworkOns Zarrad Ep JemaaNo ratings yet
- A Maximum Power Point Tracker For Module Integrated PV Systems Under Rapidly Changing Irradiance ConditionsDocument5 pagesA Maximum Power Point Tracker For Module Integrated PV Systems Under Rapidly Changing Irradiance ConditionsAnkita AroraNo ratings yet
- A Variable Step Maximum Power Point Tracking Method Using Differential Equation SolutionDocument5 pagesA Variable Step Maximum Power Point Tracking Method Using Differential Equation SolutionAnabelle SerranoNo ratings yet
- Maximum Power Point Tracking in The PV Grid-Connected Inverters of 5KWDocument4 pagesMaximum Power Point Tracking in The PV Grid-Connected Inverters of 5KWwalidghoneim1970No ratings yet
- Design and Simulation of A Grid Tied Single PhaseDocument10 pagesDesign and Simulation of A Grid Tied Single PhaseERICK SANTIAGO ACOSTA HERNANDEZNo ratings yet
- SEPIC Converter Based Photovoltaic System With Particle Swarm Optimization MPPTDocument6 pagesSEPIC Converter Based Photovoltaic System With Particle Swarm Optimization MPPTWARSE JournalsNo ratings yet
- Regulation of PV VoltageDocument10 pagesRegulation of PV Voltagecristian52No ratings yet
- Full TextDocument9 pagesFull TextManoj GuptaNo ratings yet
- 3 DacDocument7 pages3 DacAde safitraNo ratings yet
- Review and Comparison of DC-DC Converters For Maximum Power Point Tracking System in Standalone Photovoltaic (PV) ModuleDocument6 pagesReview and Comparison of DC-DC Converters For Maximum Power Point Tracking System in Standalone Photovoltaic (PV) Moduleeva saputriNo ratings yet
- Simulation of Non-Isolated Bidirectional DC - DC Converter For Battery Charging and Discharging of PV Battery Stand Alone System Supplying DC LoadDocument12 pagesSimulation of Non-Isolated Bidirectional DC - DC Converter For Battery Charging and Discharging of PV Battery Stand Alone System Supplying DC LoadGaurav PranamiNo ratings yet
- Incremental Conductance MPPT Method For PV Systems-LibreDocument3 pagesIncremental Conductance MPPT Method For PV Systems-LibreRushikeshKatkarNo ratings yet
- MPPT and PQ Control of PV Generators in Distribution SystemsDocument8 pagesMPPT and PQ Control of PV Generators in Distribution SystemsBreno NunesNo ratings yet
- T-S Fuzzy Model Based Maximum Power Point Tracking Control of Photovoltaic SystemDocument8 pagesT-S Fuzzy Model Based Maximum Power Point Tracking Control of Photovoltaic SystemAdvika SharmaNo ratings yet
- Maximum Power Point Tracking Control of PV System For DC Motors Drive With Neural NetworkDocument6 pagesMaximum Power Point Tracking Control of PV System For DC Motors Drive With Neural NetworkHackbartNo ratings yet
- Medgreen-Lb 2011 Photovoltaic Cell /Panel/Array Characterizations and Modeling Considering Both Reverse and Direct ModesDocument9 pagesMedgreen-Lb 2011 Photovoltaic Cell /Panel/Array Characterizations and Modeling Considering Both Reverse and Direct ModesHabes NoraNo ratings yet
- Israr 2017Document6 pagesIsrar 2017drtoma97No ratings yet
- Back-Stepping Control of Off-Grid PV InverterDocument6 pagesBack-Stepping Control of Off-Grid PV InverterMartino Ojwok AjangnayNo ratings yet
- Comparative Analysis of Backstepping and Active Disturbance Rejection Control Approach Used in Photovoltaic System Connected To The GridDocument10 pagesComparative Analysis of Backstepping and Active Disturbance Rejection Control Approach Used in Photovoltaic System Connected To The GridDileep VarmaNo ratings yet
- Perturb and Observe Method MATLAB Simulink and Design of PV System Using Buck Boost ConverterDocument5 pagesPerturb and Observe Method MATLAB Simulink and Design of PV System Using Buck Boost ConverterGss ChaitanyaNo ratings yet
- Tracing Current-Voltage Curve of Solar Panel BasedDocument8 pagesTracing Current-Voltage Curve of Solar Panel BasedMihai BogdanNo ratings yet
- Maximum Power Point Tracking of PV Arrays Using Different TechniquesDocument9 pagesMaximum Power Point Tracking of PV Arrays Using Different Techniquesmanohar487No ratings yet
- Perbedaan Hill Climbing Dan P&ODocument13 pagesPerbedaan Hill Climbing Dan P&Obaymax love spideyNo ratings yet
- Ieee Iceeot Dmi 03 16 Or0942Document6 pagesIeee Iceeot Dmi 03 16 Or0942tushar.wadghuleNo ratings yet
- Voltage Regulation of Photovoltaic Arrays: Small-Signal Analysis and Control DesignDocument13 pagesVoltage Regulation of Photovoltaic Arrays: Small-Signal Analysis and Control DesignRodrigo DiasNo ratings yet
- Modeling and Simulation of Grid-Connected Hybrid Photovoltaic/Battery Distributed Generation SystemDocument10 pagesModeling and Simulation of Grid-Connected Hybrid Photovoltaic/Battery Distributed Generation SystemBreno NunesNo ratings yet
- Comparative Efficiency Assessment of MPPT Algorithms in Photovoltaic SystemsDocument7 pagesComparative Efficiency Assessment of MPPT Algorithms in Photovoltaic SystemsmusNo ratings yet
- Analysis and Emulation of A Photovoltaic Solar System Using A MATLAB/Simulink Model and The DS1104 UnitDocument6 pagesAnalysis and Emulation of A Photovoltaic Solar System Using A MATLAB/Simulink Model and The DS1104 UnitademargcjuniorNo ratings yet
- Introduction To Solar Energy and MPPTDocument22 pagesIntroduction To Solar Energy and MPPTGss ChaitanyaNo ratings yet
- Design and Implementation of A Low Cost MPPT Controller For Solar PV SystemDocument6 pagesDesign and Implementation of A Low Cost MPPT Controller For Solar PV SystemAhmed ShoeebNo ratings yet
- Extraction of Maximum Power From A Solar PV System Using Fuzzy Controller Based MPPT TechniqueDocument6 pagesExtraction of Maximum Power From A Solar PV System Using Fuzzy Controller Based MPPT Techniquesaeed ebrahimiNo ratings yet
- MPPT - PV Bong 11020623123625024Document14 pagesMPPT - PV Bong 11020623123625024tran duyNo ratings yet
- MPPT P&oDocument7 pagesMPPT P&onoumsi briceNo ratings yet
- Sumanth 9Document13 pagesSumanth 9Chenchu TnvNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Z-Alire - FLC TAKAGI-SUGENODocument15 pagesZ-Alire - FLC TAKAGI-SUGENOatam azerNo ratings yet
- FSS2015Document11 pagesFSS2015atam azerNo ratings yet
- Fuzzy logic MPPT improves standalone PV system performanceDocument4 pagesFuzzy logic MPPT improves standalone PV system performanceatam azerNo ratings yet
- Papers Chadli 1 FLC LmiDocument6 pagesPapers Chadli 1 FLC Lmiatam azerNo ratings yet
- 1-Lmi Lmi FLC BuckDocument11 pages1-Lmi Lmi FLC Buckatam azerNo ratings yet
- 1 Lmi BoostDocument7 pages1 Lmi Boostatam azerNo ratings yet
- ChenafaDocument8 pagesChenafaatam azerNo ratings yet
- Design and Simulation of Photo Voltaic Water Pumping SystemDocument113 pagesDesign and Simulation of Photo Voltaic Water Pumping SystemBhukya Mangu100% (1)
- State Space Modeling and Control of The DC-DC Multilevel Boost ConverterDocument5 pagesState Space Modeling and Control of The DC-DC Multilevel Boost Converteratam azerNo ratings yet
- Abstract - T: An Electric Vehicle Drive SystemDocument6 pagesAbstract - T: An Electric Vehicle Drive Systematam azerNo ratings yet
- Two 5 PV Mas Pump SMCDocument6 pagesTwo 5 PV Mas Pump SMCatam azerNo ratings yet
- Parallel DC-AC Conversion System Based On Separate Solar Farms With MPPT ControlDocument7 pagesParallel DC-AC Conversion System Based On Separate Solar Farms With MPPT Controlatam azerNo ratings yet
- Fuzzy Logic PDFDocument20 pagesFuzzy Logic PDFlibranhitesh7889No ratings yet
- Two 10 FLC PV Mas 4 BatterieDocument6 pagesTwo 10 FLC PV Mas 4 Batterieatam azerNo ratings yet
- Pub 17 PV MPPT Equation 05449468Document4 pagesPub 17 PV MPPT Equation 05449468atam azerNo ratings yet
- Grid-Connected PV System with FPGA-Based Power Factor Control and Islanding DetectionDocument4 pagesGrid-Connected PV System with FPGA-Based Power Factor Control and Islanding Detectionatam azerNo ratings yet
- Pub 8 DC-DC - Buck - and - Boost - Converter - Design - Issues - in - Recent - VLSI - PlatformDocument4 pagesPub 8 DC-DC - Buck - and - Boost - Converter - Design - Issues - in - Recent - VLSI - Platformatam azerNo ratings yet
- Pub 4-Single-Phase - Single-Stage - High - DC - Voltage - Multiplier - ConverterDocument5 pagesPub 4-Single-Phase - Single-Stage - High - DC - Voltage - Multiplier - Converteratam azerNo ratings yet
- BOYLESTAD 103pagesDocument103 pagesBOYLESTAD 103pagesIan AmadorNo ratings yet
- Laser-guided door opener circuit overviewDocument9 pagesLaser-guided door opener circuit overviewsekhar469No ratings yet
- Otc 25777 MS PDFDocument9 pagesOtc 25777 MS PDFObi MogboNo ratings yet
- DVD Noblex Dvd-1350: 3828 Control Borad SechmaticDocument15 pagesDVD Noblex Dvd-1350: 3828 Control Borad SechmaticMariano Ohienart100% (1)
- Atlas Copco Neos Xchange KitsDocument17 pagesAtlas Copco Neos Xchange KitsahmedalgaloNo ratings yet
- Lithium-Ion GuideDocument68 pagesLithium-Ion GuideVasyaNo ratings yet
- Display Honeywell s7999 Controlinks DisplayDocument12 pagesDisplay Honeywell s7999 Controlinks DisplaydcarunchioNo ratings yet
- bc337 338Document2 pagesbc337 338Jose M PeresNo ratings yet
- EEE373 Electric Motor Drive: Asst. Prof. Dr. Mongkol Konghirun Ee, KmuttDocument16 pagesEEE373 Electric Motor Drive: Asst. Prof. Dr. Mongkol Konghirun Ee, KmuttMohd Mohsin KhanNo ratings yet
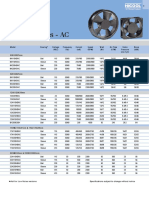
- Compact Fan Ac PDFDocument1 pageCompact Fan Ac PDFKanaga RajNo ratings yet
- Ezy Rad OpDocument4 pagesEzy Rad OpGanbayar Baygaa BatchuluunNo ratings yet
- 2021 Award Nomination: Nominee(s) CategoryDocument5 pages2021 Award Nomination: Nominee(s) Categoryyrdna nawaiteosNo ratings yet
- Electric Motors Reference GuideDocument166 pagesElectric Motors Reference GuideYashveer100% (2)
- Wires and CablesDocument17 pagesWires and CablesmehtabhumikaaNo ratings yet
- Infineon-AN2010 09 Automotive IGBT Modules Explanations-An-V1.0-EnDocument29 pagesInfineon-AN2010 09 Automotive IGBT Modules Explanations-An-V1.0-EnSuman SahaNo ratings yet
- Power System Control and AutomationDocument23 pagesPower System Control and AutomationOM NamashivayaNo ratings yet
- UPS - 1 - 3kVA - VRLA - Spec SheetDocument7 pagesUPS - 1 - 3kVA - VRLA - Spec SheetVictor JuarezNo ratings yet
- Methods To Reduce Radiated Emissions From Optical TransceiversDocument5 pagesMethods To Reduce Radiated Emissions From Optical TransceiversParthasarathi PalaiNo ratings yet
- Microcontroller Based Lift System IJERTV1IS1010 PDFDocument3 pagesMicrocontroller Based Lift System IJERTV1IS1010 PDFshamussa ShakmakNo ratings yet
- 9020H SV Ver0Document59 pages9020H SV Ver0Robson QuinagliaNo ratings yet
- t1635t 8i PDFDocument10 pagest1635t 8i PDFAhmed MataryNo ratings yet
- Application Note 5314: Active Miller ClampDocument6 pagesApplication Note 5314: Active Miller ClampDavid ZammitNo ratings yet
- Tutorial Sim Power Systems)Document6 pagesTutorial Sim Power Systems)sebaii_newlookNo ratings yet
- Active-Filter CookbookDocument243 pagesActive-Filter CookbookName100% (1)
- GM820 EngDocument66 pagesGM820 EngDarío Ache EmeNo ratings yet
- Microwave Amlifier Design Azrar PDFDocument48 pagesMicrowave Amlifier Design Azrar PDFZakaria MounirNo ratings yet
- LM339Document12 pagesLM339Javier RenanNo ratings yet
- Motorola Mag One VZ 20 Walkie TalkieDocument2 pagesMotorola Mag One VZ 20 Walkie TalkietoitkitcoNo ratings yet
- Oven Samsung - bf641fst - Xeh-00.01.02Document41 pagesOven Samsung - bf641fst - Xeh-00.01.02petrasi100% (4)