You might also like
- Analog IC Design With Low-Dropout RegulatorsDocument374 pagesAnalog IC Design With Low-Dropout Regulatorsberbou100% (2)
- Deep Learning Method of Landslide Inventory Map With Imbalanced Samples in Optical Remote SensingDocument17 pagesDeep Learning Method of Landslide Inventory Map With Imbalanced Samples in Optical Remote Sensingnicolascabellos99No ratings yet
- GJESM Volume 8 Issue 3 Pages 339-352Document14 pagesGJESM Volume 8 Issue 3 Pages 339-352GJESMNo ratings yet
- Remote Sensing: A Meta-Learning Approach of Optimisation For Spatial Prediction of LandslidesDocument30 pagesRemote Sensing: A Meta-Learning Approach of Optimisation For Spatial Prediction of LandslidesMarco ReateguiNo ratings yet
- BuscombeRitchie DeepLearningLandscapesDocument23 pagesBuscombeRitchie DeepLearningLandscapesDimitar DachkinovNo ratings yet
- Articulo 3 - ListoDocument12 pagesArticulo 3 - ListoJean BernalNo ratings yet
- Comparing CNNs and Random Forests For LandsatDocument19 pagesComparing CNNs and Random Forests For LandsatGeoMathCenterNo ratings yet
- Recent Developments in Machine Learning Applications in Landslide Susceptibility MappingDocument7 pagesRecent Developments in Machine Learning Applications in Landslide Susceptibility Mappingakbar kushanoorNo ratings yet
- Ggac 468Document24 pagesGgac 468antonio.lazaroNo ratings yet
- Remote SensingDocument29 pagesRemote SensingAfiat KhanNo ratings yet
- Landslide Risk Analysis Using Artificial Neural Ne PDFDocument16 pagesLandslide Risk Analysis Using Artificial Neural Ne PDFBambang SiswantoNo ratings yet
- 23-03-2021 Understanding Urban LanduseDocument15 pages23-03-2021 Understanding Urban LandusesabrineNo ratings yet
- 1 s2.0 S0034425721003357 MainDocument27 pages1 s2.0 S0034425721003357 MainIoana VizireanuNo ratings yet
- Spatial Landslide Susceptibility Assessment Using Machine Lear - 2021 - GeoscienDocument13 pagesSpatial Landslide Susceptibility Assessment Using Machine Lear - 2021 - GeoscienchestherNo ratings yet
- 1 s2.0 S167498712030116X MainDocument9 pages1 s2.0 S167498712030116X MainYeersainth Figueroa GomezNo ratings yet
- Large-Scale Damage Detection Using Satellite ImageryDocument8 pagesLarge-Scale Damage Detection Using Satellite ImageryMehdi JalayeriNo ratings yet
- Hasan 2019 IOP Conf. Ser. Earth Environ. Sci. 357 012035Document11 pagesHasan 2019 IOP Conf. Ser. Earth Environ. Sci. 357 012035Minh Đinh NhậtNo ratings yet
- Watershed Segmentation of Low Contrast ImagesDocument6 pagesWatershed Segmentation of Low Contrast Imagesrishi guptaNo ratings yet
- A GIS Based Spatially - Explicit Sensitivity and Uncertainty AnalysisDocument15 pagesA GIS Based Spatially - Explicit Sensitivity and Uncertainty AnalysisANDREA FERRONo ratings yet
- Computers & Geosciences: Bakhtiar Feizizadeh, Majid Shadman Roodposhti, Piotr Jankowski, Thomas BlaschkeDocument14 pagesComputers & Geosciences: Bakhtiar Feizizadeh, Majid Shadman Roodposhti, Piotr Jankowski, Thomas BlaschkeMuhammad Shaifullah SasmonoNo ratings yet
- 1 s2.0 S1674987120300542 MainDocument14 pages1 s2.0 S1674987120300542 MainDenny LumbanRajaNo ratings yet
- Deep learning UAV ReviewDocument21 pagesDeep learning UAV ReviewAlexandre AlbuquerqueNo ratings yet
- Transformer WetlandsDocument11 pagesTransformer WetlandsAnahi RomoNo ratings yet
- Remote Sensing: Overview of The Special Issue On Applications of Remote Sensing Imagery For Urban AreasDocument4 pagesRemote Sensing: Overview of The Special Issue On Applications of Remote Sensing Imagery For Urban AreasAkshayNo ratings yet
- Gatto Et Al. 2022bDocument13 pagesGatto Et Al. 2022bMichele GattoNo ratings yet
- SMPR2019 Paper Seydi Rastiveis ISPRSDocument8 pagesSMPR2019 Paper Seydi Rastiveis ISPRSJohn CoucNo ratings yet
- Geodma p1Document2 pagesGeodma p1Thales Sehn KörtingNo ratings yet
- Deep Learning Outperforms Traditional Models for Landslide MappingDocument25 pagesDeep Learning Outperforms Traditional Models for Landslide Mappingdipali1631No ratings yet
- gep_2022112910254291Document17 pagesgep_2022112910254291enninooNo ratings yet
- scmimdt2021Document6 pagesscmimdt2021plovonrNo ratings yet
- 1 s2.0 S0012825222000289 MainDocument22 pages1 s2.0 S0012825222000289 MainJorge D. MarquesNo ratings yet
- Machine Learning & Statistical Techniques for Landslide ModelingDocument11 pagesMachine Learning & Statistical Techniques for Landslide Modelingakbar kushanoorNo ratings yet
- Remotesensing 14 03228 v2 PDFDocument24 pagesRemotesensing 14 03228 v2 PDFStefânia SousaNo ratings yet
- Kussul Et Al 2017 GRSL DeepLearningDocument6 pagesKussul Et Al 2017 GRSL DeepLearninghelmi storeNo ratings yet
- Remotesensing 14 03855 PDFDocument31 pagesRemotesensing 14 03855 PDFShekhar TomarNo ratings yet
- hess-26-4345-2022Document34 pageshess-26-4345-2022webgis indiaNo ratings yet
- Final Assignment - Research Proposal by Roquia SalamDocument8 pagesFinal Assignment - Research Proposal by Roquia SalamEsha BruNo ratings yet
- 015 Reef-Insight a Framework for ReefDocument17 pages015 Reef-Insight a Framework for ReefVINESSE JUMAWIDNo ratings yet
- 2012 - Comparison of Support Vector Machine, Neural Network, and CART Algorithms For The Land-Cover Classification Using Limited Training Data PointsDocument10 pages2012 - Comparison of Support Vector Machine, Neural Network, and CART Algorithms For The Land-Cover Classification Using Limited Training Data PointsMaria DimouNo ratings yet
- Classification of Multi-Date, Tempo-Spectral Data Using NDVI ValuesDocument6 pagesClassification of Multi-Date, Tempo-Spectral Data Using NDVI ValuesShakeel RanaNo ratings yet
- 1 s2.0 S1569843222002771 MainDocument10 pages1 s2.0 S1569843222002771 MainMuklisNo ratings yet
- Classification of Airborne 3D Point Clouds Regarding Separation of Vegetation in Complex EnvironmentsDocument15 pagesClassification of Airborne 3D Point Clouds Regarding Separation of Vegetation in Complex EnvironmentsGabriel RaamonNo ratings yet
- Masking Preprocessing in Transfer Learning For Damage Building DetectionDocument8 pagesMasking Preprocessing in Transfer Learning For Damage Building DetectionIAES IJAINo ratings yet
- Kussul Et Al 2017 GRSL DeepLearningDocument6 pagesKussul Et Al 2017 GRSL DeepLearningManish MeenaNo ratings yet
- 1 s2.0 S0012825221003597 MainDocument33 pages1 s2.0 S0012825221003597 MainDr. Khan MuhammadNo ratings yet
- Cognitive and Usability Issues in Geovisualization ResearchDocument28 pagesCognitive and Usability Issues in Geovisualization ResearchAditya R. AchitoNo ratings yet
- Review On Remote Sensing Methods For Landslide Detection Using Machine and Deep LearningDocument24 pagesReview On Remote Sensing Methods For Landslide Detection Using Machine and Deep LearninggauravNo ratings yet
- Built-up Area Extraction Using Landsat 8 OLI ImageryDocument41 pagesBuilt-up Area Extraction Using Landsat 8 OLI ImagerymrizalpahleviNo ratings yet
- Remote SensingDocument110 pagesRemote SensingShauanne Dias PancieriNo ratings yet
- Final Project by Roquia SalamDocument8 pagesFinal Project by Roquia SalamEsha BruNo ratings yet
- 1 s2.0 S2666827021000190 MainDocument17 pages1 s2.0 S2666827021000190 MainEmirhan YılmazNo ratings yet
- Detect Deforestation with Satellite ImageryDocument8 pagesDetect Deforestation with Satellite ImagerySssNo ratings yet
- Niemeyer 2014Document14 pagesNiemeyer 2014akuba393939No ratings yet
- A New Approach To Flood Susceptibility Assessment in Data-Scarce and Ungauged Regions Based On GIS-based Hybrid Multi Criteria Decision-Making MethodDocument15 pagesA New Approach To Flood Susceptibility Assessment in Data-Scarce and Ungauged Regions Based On GIS-based Hybrid Multi Criteria Decision-Making Methodjoao luisNo ratings yet
- Remotesensing 14 01453Document19 pagesRemotesensing 14 01453Mirela B.No ratings yet
- Remotesensing 16 00789 v2Document27 pagesRemotesensing 16 00789 v2Reza NugrahaNo ratings yet
- Accuracy Assessment of Land Use/Land Cover Classification Using Remote Sensing and GISDocument13 pagesAccuracy Assessment of Land Use/Land Cover Classification Using Remote Sensing and GISNgọc PhanNo ratings yet
- Using Gis and Artificial Neural Network For Deforestation PredictionDocument15 pagesUsing Gis and Artificial Neural Network For Deforestation PredictioningjuliocuellarNo ratings yet
- Thickness, Porosity, and Permeability Prediction: Comparative Studies and Application of The Geostatistical Modeling in An Oil FieldDocument24 pagesThickness, Porosity, and Permeability Prediction: Comparative Studies and Application of The Geostatistical Modeling in An Oil Fieldpavka789No ratings yet
- WebGIS Application Landslide Hazard and RiskDocument13 pagesWebGIS Application Landslide Hazard and RiskmichgebNo ratings yet
- Ramosetal 2015 Landslides BogotaDocument12 pagesRamosetal 2015 Landslides BogotajalexvegaNo ratings yet
- 2013 Poster Bellugi 19 97Document1 page2013 Poster Bellugi 19 97jalexvegaNo ratings yet
- Building Damage Risk Assessment with GISDocument8 pagesBuilding Damage Risk Assessment with GISjalexvegaNo ratings yet
- Geosciences 11 00259 v2Document23 pagesGeosciences 11 00259 v2jalexvegaNo ratings yet
- Landslide Risk Analysis of Miyun Reservoir Area Based On RS and GISDocument7 pagesLandslide Risk Analysis of Miyun Reservoir Area Based On RS and GISjalexvegaNo ratings yet
- Feart 09 658578Document14 pagesFeart 09 658578jalexvegaNo ratings yet
- A New Strategy To Map Landslides With A Generalized Convolutional Neural NetworkDocument15 pagesA New Strategy To Map Landslides With A Generalized Convolutional Neural NetworkHoàng MạnhNo ratings yet
- Ijerph 17 08055Document17 pagesIjerph 17 08055jalexvegaNo ratings yet
- 203 - System Probabilistic Stability Analysis of Soil Slopes Using Gaussian - Kang2015 PDFDocument13 pages203 - System Probabilistic Stability Analysis of Soil Slopes Using Gaussian - Kang2015 PDFJenny BaronNo ratings yet
- 1 s2.0 S0169555X07002991 Main PDFDocument20 pages1 s2.0 S0169555X07002991 Main PDFjalexvegaNo ratings yet
- Environmental Modelling & Software: M. Papathoma-K Ohle, A. Zischg, S. Fuchs, T. Glade, M. KeilerDocument14 pagesEnvironmental Modelling & Software: M. Papathoma-K Ohle, A. Zischg, S. Fuchs, T. Glade, M. KeilerjalexvegaNo ratings yet
- Notes Boolean Raster WellDocument1 pageNotes Boolean Raster WelljalexvegaNo ratings yet
- 1 s2.0 S0013795214001811 Main PDFDocument12 pages1 s2.0 S0013795214001811 Main PDFjalexvegaNo ratings yet
- Thermal Infrared Imagery LabDocument14 pagesThermal Infrared Imagery LabjalexvegaNo ratings yet
- Hurtado 2020 IOP Conf. Ser. Mater. Sci. Eng. 960 022027Document11 pagesHurtado 2020 IOP Conf. Ser. Mater. Sci. Eng. 960 022027jalexvegaNo ratings yet
- Gis Spatial Analysis AntarcticDocument17 pagesGis Spatial Analysis AntarcticjalexvegaNo ratings yet
- Gis Primer.v2Document63 pagesGis Primer.v2jalexvegaNo ratings yet
- Reading and Writing Vector Data With OGR Data With OGR: Open Source RS/GIS Python Week 1Document38 pagesReading and Writing Vector Data With OGR Data With OGR: Open Source RS/GIS Python Week 1cslrajuNo ratings yet
- The Solid Materials of The Earth'S SurfaceDocument67 pagesThe Solid Materials of The Earth'S SurfacejalexvegaNo ratings yet
- Solution Boolean Raster WellDocument1 pageSolution Boolean Raster WelljalexvegaNo ratings yet
- Topoff AssignmentDocument8 pagesTopoff AssignmentjalexvegaNo ratings yet
- Earthquakes in GISDocument6 pagesEarthquakes in GISjalexvegaNo ratings yet
- Ospy hw1Document1 pageOspy hw1Jareer AL-yasiryNo ratings yet
- Landscapes: Geomorphology (The Study of The Earth's Landscapes and The Processes That ShapeDocument18 pagesLandscapes: Geomorphology (The Study of The Earth's Landscapes and The Processes That ShapejalexvegaNo ratings yet
- Earth Surface Chapter 1 IntroductionDocument70 pagesEarth Surface Chapter 1 IntroductionHinty1984No ratings yet
- The Lay of The Land: The Topography of The Earth'S SurfaceDocument24 pagesThe Lay of The Land: The Topography of The Earth'S SurfacejalexvegaNo ratings yet
- STABILITYDocument14 pagesSTABILITYjalexvegaNo ratings yet
- Understanding Dynamic Segmentation: Working With Events in Arcgis 8.2Document4 pagesUnderstanding Dynamic Segmentation: Working With Events in Arcgis 8.2jalexvegaNo ratings yet
- Welcome: To This Collection of Engineering StandardsDocument51 pagesWelcome: To This Collection of Engineering StandardsOmerNo ratings yet
- BPI m1 DatasheetDocument97 pagesBPI m1 DatasheetIlhamHamiddinNo ratings yet
- Network Communication Protocols (UDP/TCPDocument10 pagesNetwork Communication Protocols (UDP/TCPCENTRAL UNITRACKERNo ratings yet
- Druckminderstation 300 200 eDocument35 pagesDruckminderstation 300 200 ebehnam fallahNo ratings yet
- Distributor Installation: Crankshaft Position Sensor RemovalDocument2 pagesDistributor Installation: Crankshaft Position Sensor RemovalKeyboardMan1960No ratings yet
- Network As A Service (Naas) Data Analysis, Business, and Operational Efficiency MethodologyDocument33 pagesNetwork As A Service (Naas) Data Analysis, Business, and Operational Efficiency MethodologyCarlosRivasNo ratings yet
- Create a Two Server ADFS LabDocument2 pagesCreate a Two Server ADFS LabDisha1No ratings yet
- Unmanned Petrol Bunk System Using Rfid TechnologyDocument11 pagesUnmanned Petrol Bunk System Using Rfid TechnologyEshwar EslavathNo ratings yet
- Certified Piping Engineer Seeks Stress Engineer RoleDocument3 pagesCertified Piping Engineer Seeks Stress Engineer RoledineshsirasatNo ratings yet
- Weighing Bucket Type Rain GaugeDocument6 pagesWeighing Bucket Type Rain GaugeLouella Mae BernasolNo ratings yet
- AMTED109015EN Web PDFDocument28 pagesAMTED109015EN Web PDFJulián Jair Cadena SánchezNo ratings yet
- Microcontroller 8051Document72 pagesMicrocontroller 8051vaibhav sharmaNo ratings yet
- Benchmarking and A Case Study On Intellex': Apparel Quality Management IiDocument8 pagesBenchmarking and A Case Study On Intellex': Apparel Quality Management IivibhavNo ratings yet
- Spirent TestCenter Command Sequencer V3Document61 pagesSpirent TestCenter Command Sequencer V3sumabang0% (1)
- Strategic Marketing Management Midterm ExamDocument6 pagesStrategic Marketing Management Midterm ExamJen NerNo ratings yet
- BFCG-LA Exec Summary v2Document1 pageBFCG-LA Exec Summary v2Tim DowdingNo ratings yet
- Python Course Slides - PPTX - AutoRecoveredDocument53 pagesPython Course Slides - PPTX - AutoRecoveredMy Life StyleNo ratings yet
- Catalog Produk Arduino Rajacell Ver10.4 - End - UserDocument192 pagesCatalog Produk Arduino Rajacell Ver10.4 - End - UserSanto SetiawanNo ratings yet
- Radio communications history and theoryDocument83 pagesRadio communications history and theorySri MurthyNo ratings yet
- FMCW Range Doppler MapDocument2 pagesFMCW Range Doppler MapReinaldoNo ratings yet
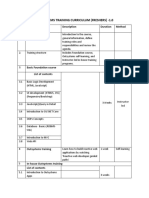
- Outsystems Training Curriculum (Freshers)Document3 pagesOutsystems Training Curriculum (Freshers)Chethan BkNo ratings yet
- WWG Ibt-5 Basic Rate Access ISDN Tester: BN 7522/10, BN 7522/20 and BN 7522/70 Series DA ..Document97 pagesWWG Ibt-5 Basic Rate Access ISDN Tester: BN 7522/10, BN 7522/20 and BN 7522/70 Series DA ..broecker_mail.deNo ratings yet
- Outdoor Units: EDUS 39 - 606A - R1Document31 pagesOutdoor Units: EDUS 39 - 606A - R1msn20091No ratings yet
- Tejb9628 00Document64 pagesTejb9628 00DinaNo ratings yet
- DS6100 Remote Indicator Scale Instruction Manual SummaryDocument22 pagesDS6100 Remote Indicator Scale Instruction Manual SummaryMoyiiNo ratings yet
- Fundamentals of Electrical Transients and Switching OperationsDocument13 pagesFundamentals of Electrical Transients and Switching OperationsCARLOS DANIEL MEJIA BANDANo ratings yet
- Worldwide Data Privacy Regulations ComparedDocument26 pagesWorldwide Data Privacy Regulations ComparedRandy Ambrósio QjNo ratings yet
- MCC Final Exam QuestionsDocument3 pagesMCC Final Exam QuestionsKomal TuliNo ratings yet
- Ch04 OBE-MultiplexingDocument28 pagesCh04 OBE-MultiplexingNooraFukuzawa NorNo ratings yet