You might also like
- Welding ProcessesDocument7 pagesWelding ProcessesTridib DeyNo ratings yet
- Broward County Schools AP Physics 1 ReviewDocument20 pagesBroward County Schools AP Physics 1 Reviewchris hemmainNo ratings yet
- Motion Simulation and Mechanism DesignDocument18 pagesMotion Simulation and Mechanism Designmongim0sc33% (3)
- Worksheet - Stacks of Graphs KEYDocument4 pagesWorksheet - Stacks of Graphs KEYKiersten Riedford50% (2)
- 4.failure Theories and Stress ConcentrationsDocument21 pages4.failure Theories and Stress ConcentrationsAmr El SaeedNo ratings yet
- WEIR SPM TWS600S Pump-ManualDocument41 pagesWEIR SPM TWS600S Pump-ManualDennis Daniel50% (2)
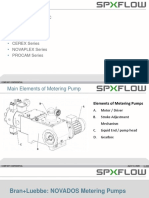
- 2 - B+L - Pump - Level 2Document87 pages2 - B+L - Pump - Level 2riin100% (2)
- Pump Pump Piping Presentation PDFDocument55 pagesPump Pump Piping Presentation PDFPoonam Ashwin100% (1)
- NikkuDocument36 pagesNikkuNishkarsh AroraNo ratings yet
- Miyachi Fundamentals Resistance WeldingDocument8 pagesMiyachi Fundamentals Resistance Weldinghlgc63No ratings yet
- Langrangian HamiltonDocument277 pagesLangrangian HamiltonkeepingbusyNo ratings yet
- Collection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyFrom EverandCollection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyRating: 3 out of 5 stars3/5 (2)
- A Case Study On Projectile MotionDocument6 pagesA Case Study On Projectile MotionEditor IJTSRDNo ratings yet
- 04 LAJPE 782 ChudinovDocument5 pages04 LAJPE 782 Chudinovbenitogaldos19gmail.comNo ratings yet
- Basic Distillation - PRO IIDocument7 pagesBasic Distillation - PRO IIkay50No ratings yet
- Chinese Physics Olympiad 2017 Finals Theoretical Exam: Translated By: Wai Ching Choi Edited By: Kushal ThamanDocument7 pagesChinese Physics Olympiad 2017 Finals Theoretical Exam: Translated By: Wai Ching Choi Edited By: Kushal Thamansmritidipa m100% (1)
- Coordinates, Phase Space, Constraints: Sourendu GuptaDocument11 pagesCoordinates, Phase Space, Constraints: Sourendu GuptaTerenzio Soldovieri C.No ratings yet
- Prelimexam Jan 2018 Thur FriDocument14 pagesPrelimexam Jan 2018 Thur FriAyushNo ratings yet
- Rotating Saddle Trap: A Coriolis Force in An Inertial Frame: 1 Introduction and BackgroundDocument17 pagesRotating Saddle Trap: A Coriolis Force in An Inertial Frame: 1 Introduction and BackgroundFishboneNo ratings yet
- 2018 QUALS - Section 1 - Classical Mechanics With SolutionsDocument17 pages2018 QUALS - Section 1 - Classical Mechanics With SolutionsIoannis GaroufalidisNo ratings yet
- Torsión 2...Document7 pagesTorsión 2...Alejandro RodriguezqNo ratings yet
- Coordinates, Phase Space, Constraints: Sourendu GuptaDocument12 pagesCoordinates, Phase Space, Constraints: Sourendu GuptatridevmishraNo ratings yet
- Classical MechanicsDocument16 pagesClassical MechanicsshivanandNo ratings yet
- Malament D., Norton - Dome PDFDocument18 pagesMalament D., Norton - Dome PDFAndreas ZoupasNo ratings yet
- Lecture 1Document24 pagesLecture 1Jarom SaavedraNo ratings yet
- Homework Exercises 7: Theoretical Physics I. Theoretical Mechanics IDocument6 pagesHomework Exercises 7: Theoretical Physics I. Theoretical Mechanics Icamelrider123No ratings yet
- Forced Torsional Oscillations of An Elastic Half-Space. I: Articles You May Be Interested inDocument4 pagesForced Torsional Oscillations of An Elastic Half-Space. I: Articles You May Be Interested inFahim KhanNo ratings yet
- Chapter 12 and 13Document28 pagesChapter 12 and 13Rynardt VogelNo ratings yet
- Figure 1: Rotating curve.: m and M - Find the equations of motion. Find the normal modes when θDocument2 pagesFigure 1: Rotating curve.: m and M - Find the equations of motion. Find the normal modes when θsdenkaspNo ratings yet
- Reading Assignment 7 A Susskind Chap 6Document11 pagesReading Assignment 7 A Susskind Chap 6Max ShervingtonNo ratings yet
- Archimedes Quadrature of The Parabola - A Mechanical ViewDocument5 pagesArchimedes Quadrature of The Parabola - A Mechanical ViewmojarramanNo ratings yet
- EP 222: Classical Mechanics Tutorial Sheet 2Document2 pagesEP 222: Classical Mechanics Tutorial Sheet 2Ashok GargNo ratings yet
- A Review On Particle and Rigid Body Dynamics: Prof. Lapo GoriDocument27 pagesA Review On Particle and Rigid Body Dynamics: Prof. Lapo GoriMaterial UFMGNo ratings yet
- Problem Set 6Document4 pagesProblem Set 6James ConnaughtonNo ratings yet
- Tutorial 11Document2 pagesTutorial 11ananyapandey6582No ratings yet
- Lagrangian Dynamics Problem SolvingDocument5 pagesLagrangian Dynamics Problem Solvingvivekrajbhilai5850No ratings yet
- Assignment #1 General RelativityDocument2 pagesAssignment #1 General RelativityblaNo ratings yet
- Zitterbewegung of Massless ParticlesDocument18 pagesZitterbewegung of Massless ParticlesVera Gardasevic MitrovicNo ratings yet
- Attitude Consensus With Fixed Rotational Axis Via Energy DissipationDocument6 pagesAttitude Consensus With Fixed Rotational Axis Via Energy Dissipationscribd_kgNo ratings yet
- CM 23 Rigid Body MotionDocument11 pagesCM 23 Rigid Body Motionosama hasanNo ratings yet
- Quantum Field Theory MethodsDocument38 pagesQuantum Field Theory Methodsyashu13100% (1)
- Hydrodynamics in Two Dimensions and Vortex Theory : PhysicsDocument22 pagesHydrodynamics in Two Dimensions and Vortex Theory : Physicsyijat18183No ratings yet
- Forced Vibrations of A Cantilever Beam: European Journal of Physics September 2012Document11 pagesForced Vibrations of A Cantilever Beam: European Journal of Physics September 2012anandhu s kumarNo ratings yet
- Propagation of Love Waves in An Elastic Layer With Void PoresDocument9 pagesPropagation of Love Waves in An Elastic Layer With Void Poresmadhumitakundu1976No ratings yet
- 2023 EM1 hw6Document2 pages2023 EM1 hw6810003No ratings yet
- Lattice Vibrations - PhononsDocument13 pagesLattice Vibrations - Phononssiti fatimah azzahroNo ratings yet
- принстон 2 PDFDocument26 pagesпринстон 2 PDFLumpalump 300ftNo ratings yet
- Classical Mechanics Ph.D. Qualifying ExaminationDocument6 pagesClassical Mechanics Ph.D. Qualifying Examinationpusa123No ratings yet
- BK Pandey 01Document70 pagesBK Pandey 01Anurag SrivastavaNo ratings yet
- Kinematics: K Z J y I X OM RDocument11 pagesKinematics: K Z J y I X OM RNguyễn Tuấn KiệtNo ratings yet
- Direct and Inverse Kinematics of Serial Manipulators (Nyrio One 6-Axis Robotic Arm)Document8 pagesDirect and Inverse Kinematics of Serial Manipulators (Nyrio One 6-Axis Robotic Arm)Bubble up KadjoNo ratings yet
- CM Qualifier2013fallDocument5 pagesCM Qualifier2013fallpusa123No ratings yet
- The Principle of EquivalenceDocument23 pagesThe Principle of EquivalenceAnonymous 8buGHsNo ratings yet
- SHM QuestionsDocument4 pagesSHM QuestionsmuridziwinstonNo ratings yet
- 2020 Taiwan TST-TranslationDocument20 pages2020 Taiwan TST-TranslationKrishnamohanNo ratings yet
- Creep Analysis of Thin Rotating Disc Under Plane Stress With No Edge LoadDocument14 pagesCreep Analysis of Thin Rotating Disc Under Plane Stress With No Edge LoadManish GargNo ratings yet
- Draft: Lecture Notes in Group TheoryDocument16 pagesDraft: Lecture Notes in Group TheoryFardin AabediNo ratings yet
- Ts 2Document2 pagesTs 2ved patilNo ratings yet
- Problem Set VI Lagrangian DynamicsDocument4 pagesProblem Set VI Lagrangian DynamicsDiego ForeroNo ratings yet
- Questoes de Relatividade 1Document33 pagesQuestoes de Relatividade 1Sk1lzNo ratings yet
- Strength of Materials BookDocument99 pagesStrength of Materials Bookmidhun ChakravarthiNo ratings yet
- PHYS30392 Notes Week3Document4 pagesPHYS30392 Notes Week3Itachi UchihaNo ratings yet
- Flat Slab by FemDocument8 pagesFlat Slab by Femanuj kumarNo ratings yet
- Kinematic Resonance and Memory Effect of Gravitational WavesDocument4 pagesKinematic Resonance and Memory Effect of Gravitational WavessayanNo ratings yet
- Lecture Slides 6-7Document26 pagesLecture Slides 6-7themarvelbeastNo ratings yet
- PHY301: Assignment 4Document2 pagesPHY301: Assignment 4Gurvir SinghNo ratings yet
- Mechanics ProblemDocument9 pagesMechanics ProblemSon CaoNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Chempak BrochureDocument2 pagesChempak BrochurehcabanillaspNo ratings yet
- Centrifugal Pump Without Bearings or Seals - EDTDocument4 pagesCentrifugal Pump Without Bearings or Seals - EDTCarlos CuadradoNo ratings yet
- Drymax Dryers WittmannDocument12 pagesDrymax Dryers WittmannFlorin TarziuNo ratings yet
- Geography Note Earthquake For U.P.S.C W.B.C.S General Combined Ugcnet ExamDocument2 pagesGeography Note Earthquake For U.P.S.C W.B.C.S General Combined Ugcnet ExamNabarun JanaNo ratings yet
- LCD SLMDocument9 pagesLCD SLMVipin_Kumar_5649No ratings yet
- Technical Specifications - ASTM A27 Grade 70-40Document1 pageTechnical Specifications - ASTM A27 Grade 70-40S.Mohsin AliNo ratings yet
- Welddefects & Quality ControlDocument50 pagesWelddefects & Quality ControlAmirtha Thiyagaraajan AlagesanNo ratings yet
- Gamma Coincidence LabDocument4 pagesGamma Coincidence LabDavid HuangNo ratings yet
- Illuminance Level RequiredDocument4 pagesIlluminance Level RequiredKhurram Shahzad RizwiNo ratings yet
- Product Data Sheet: Transunilac Finish 3.30Document2 pagesProduct Data Sheet: Transunilac Finish 3.30Sachin NambiarNo ratings yet
- Pearson Ch2 Answers-1Document12 pagesPearson Ch2 Answers-1Person GainableNo ratings yet
- TDS TREVA Bioplastic TR6041 NaturalDocument2 pagesTDS TREVA Bioplastic TR6041 NaturalHenry HungNo ratings yet
- S10 Water Circuit GeneralDocument14 pagesS10 Water Circuit GeneralHENRY HUAMANNo ratings yet
- Electron Probe Microanalysis - Scanning Electron Microscopy Epma - SemDocument29 pagesElectron Probe Microanalysis - Scanning Electron Microscopy Epma - SemKharen Tatiana Ramirez CastroNo ratings yet
- Chemistry SQPDocument4 pagesChemistry SQPstressNo ratings yet
- Instructions: Read and Answer The Following Sections.: 1. Match Both ColumnsDocument3 pagesInstructions: Read and Answer The Following Sections.: 1. Match Both ColumnsMon AcostaNo ratings yet
- BFP-1B de Mechanical Seal Damage RCA Present by Vu Van TuanDocument23 pagesBFP-1B de Mechanical Seal Damage RCA Present by Vu Van TuanThắng NguyễnNo ratings yet
- Staircase DesignDocument3 pagesStaircase DesignSaurav ShahNo ratings yet
- V813 C - GigaTorqueGX 1Document6 pagesV813 C - GigaTorqueGX 1Masli DarNo ratings yet
- Dark Energy Survey DES CollaborationDocument38 pagesDark Energy Survey DES CollaborationgeorgcantorNo ratings yet
- Temperature and Relative Humidity Distributions in A Medium-Size Administrative Town in Southwest NiDocument12 pagesTemperature and Relative Humidity Distributions in A Medium-Size Administrative Town in Southwest Nijoseph ayomideNo ratings yet