You might also like
- 3 - S5 Load Sharing Rev0Document19 pages3 - S5 Load Sharing Rev0Amirouche BenlakehalNo ratings yet
- Tri Sen Surge ControlDocument4 pagesTri Sen Surge ControlJimmy RumlusNo ratings yet
- 0 - Introduction CCC Rev0Document16 pages0 - Introduction CCC Rev0Dev0009No ratings yet
- Centrifugal Compressor Surge and Speed ControlDocument14 pagesCentrifugal Compressor Surge and Speed ControlWaqas AhmedNo ratings yet
- 1 - S5V Performance Contol, and POC Rev0 - CDocument13 pages1 - S5V Performance Contol, and POC Rev0 - CDev0009No ratings yet
- Compressor Exams SolutionsDocument18 pagesCompressor Exams SolutionsMohamed BalbaaNo ratings yet
- Continuous torque monitoring improves predictive maintenanceDocument13 pagesContinuous torque monitoring improves predictive maintenancemlouredocasadoNo ratings yet
- Compressor ControlsDocument167 pagesCompressor ControlsAnonymous 70lCzDJvNo ratings yet
- Aux Lube Oil Pump LogicDocument1 pageAux Lube Oil Pump LogicAdil AhsanNo ratings yet
- Beginner's Guide To Centrifugal Compressor System Design & SimulationDocument17 pagesBeginner's Guide To Centrifugal Compressor System Design & Simulationkavinmech1No ratings yet
- Pneumatic Actuator FundamentalsDocument84 pagesPneumatic Actuator Fundamentalsheru hsNo ratings yet
- Sarasota Density Meter ID900 AccuracyDocument2 pagesSarasota Density Meter ID900 Accuracysaid_rahmansyah4750No ratings yet
- Tri Sen Controle Surge Compressores TS160Document6 pagesTri Sen Controle Surge Compressores TS160Jimmy RumlusNo ratings yet
- AntisurgeDocument6 pagesAntisurgesch203No ratings yet
- GG 01 01 2017 26Document5 pagesGG 01 01 2017 26Shaban RabieNo ratings yet
- Dse PN MetricDocument29 pagesDse PN MetricSuman DeyNo ratings yet
- Turbine Off-Frequency Operation: GE Power SystemsDocument4 pagesTurbine Off-Frequency Operation: GE Power Systemskcirrenwod100% (1)
- SIS - Safety Instrumented Systems - A Practical ViewDocument4 pagesSIS - Safety Instrumented Systems - A Practical ViewMugesh KannaNo ratings yet
- F 0077 e 55Document6 pagesF 0077 e 55Bùi Cảnh TrungNo ratings yet
- Compressed Air Dryers: Recommended Dew PointsDocument11 pagesCompressed Air Dryers: Recommended Dew Pointsjenish parekhNo ratings yet
- Basic Anti-Surge Control System ReferenceDocument6 pagesBasic Anti-Surge Control System ReferenceOlvis GuillenNo ratings yet
- 4 Reciprocating Compressor IIDocument41 pages4 Reciprocating Compressor IIBassam AmirNo ratings yet
- Centrifugal CompressorDocument220 pagesCentrifugal CompressorShahnaz Estahbanati0% (1)
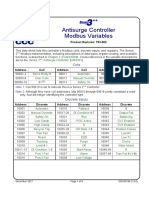
- CCC ModbusDocument6 pagesCCC ModbusMohamedRezkNo ratings yet
- Protecting A Centrifugal Compressor From SurgeDocument2 pagesProtecting A Centrifugal Compressor From SurgeDylanAdams100% (1)
- Pide - Enhanced Pid Function Block: Operational StatesDocument7 pagesPide - Enhanced Pid Function Block: Operational StatesblueskiesokieNo ratings yet
- 03A How To Operate CCC S3 Antisurge Control PDFDocument27 pages03A How To Operate CCC S3 Antisurge Control PDFingezoneNo ratings yet
- Nitrogen Gas Supply System Operation ManualDocument20 pagesNitrogen Gas Supply System Operation Manualbmw316No ratings yet
- Basic Concept of Control Valves - KSBDocument39 pagesBasic Concept of Control Valves - KSBPuspaanjaliNo ratings yet
- TMR Vs QMR TMR Vs QMR TMR vs. QMR TMR vs. QMRDocument15 pagesTMR Vs QMR TMR Vs QMR TMR vs. QMR TMR vs. QMRdijoz85No ratings yet
- Gorter r100 enDocument6 pagesGorter r100 enManish SaraswatNo ratings yet
- Analisis de Valvula Anti Surge y Fast StopDocument17 pagesAnalisis de Valvula Anti Surge y Fast Stopmcs21187No ratings yet
- Recent Advances Turbine BypassDocument4 pagesRecent Advances Turbine BypassretrogradesNo ratings yet
- Samson PRV Mounting and Operating InstructionDocument20 pagesSamson PRV Mounting and Operating InstructionRick CalaguiNo ratings yet
- P. IR. Operation PhilosophyDocument2 pagesP. IR. Operation Philosophybesant vargheesNo ratings yet
- Anexo 2. D103605X012 DVC6200 Instruction Manual PDFDocument104 pagesAnexo 2. D103605X012 DVC6200 Instruction Manual PDFJairo andres Guarnizo SuarezNo ratings yet
- Compressors & Compressed Air System: Presented by Naushad Ahmad Department: Mechanical MaintDocument48 pagesCompressors & Compressed Air System: Presented by Naushad Ahmad Department: Mechanical Maintnaushadmnnit100% (1)
- Anti SurgeDocument57 pagesAnti SurgeHAMZA BENNo ratings yet
- Design and Testing of a Regenerative Turbine PumpDocument132 pagesDesign and Testing of a Regenerative Turbine PumpSimon TudorNo ratings yet
- Running Performance: Service/Stage Data Performance OutputDocument2 pagesRunning Performance: Service/Stage Data Performance OutputJose RattiaNo ratings yet
- Three-Stage Compressor Power CalculationDocument6 pagesThree-Stage Compressor Power CalculationRifka Aisyah0% (1)
- QR01Document2 pagesQR01Mowaten MasryNo ratings yet
- Project ReportDocument36 pagesProject Reportvishi89No ratings yet
- PROTECT CENTRIFUGAL COMPRESSORS FROM SURGEDocument4 pagesPROTECT CENTRIFUGAL COMPRESSORS FROM SURGEMohamed RezkNo ratings yet
- 2024 V3 Rev BDocument147 pages2024 V3 Rev BIvan RaNo ratings yet
- Efficiency and Operating Characteristics of Centrifugal and Reciprocating Compressors - Pipeline & Gas JournalDocument6 pagesEfficiency and Operating Characteristics of Centrifugal and Reciprocating Compressors - Pipeline & Gas JournalAnargha BhattacharyaNo ratings yet
- DRESSER Regulators FlowgridDocument12 pagesDRESSER Regulators Flowgridzalziza100% (1)
- Compressor FormulaDocument1 pageCompressor FormulaMangal SinghNo ratings yet
- Fisher Fieldvue Dvc6200F Digital Valve Controller PST Calibration and Testing Using Valvelink SoftwareDocument24 pagesFisher Fieldvue Dvc6200F Digital Valve Controller PST Calibration and Testing Using Valvelink SoftwareKram Alim VillonNo ratings yet
- PRV PetrofacDocument36 pagesPRV PetrofacPradeep MagudeswaranNo ratings yet
- Understand Centrifugal CompressorDocument16 pagesUnderstand Centrifugal Compressorramanathan72-1100% (2)
- Pump Boss - Intelligent Pump Control PowerpointDocument25 pagesPump Boss - Intelligent Pump Control PowerpointChem-FlowNo ratings yet
- 1769 DSI Modbus Comm ModuleDocument204 pages1769 DSI Modbus Comm ModuleThanh BaronNo ratings yet
- Dynamic Simulation Example Invensys PDFDocument6 pagesDynamic Simulation Example Invensys PDFdigecaNo ratings yet
- Introduction To Magnetic Flow MetersDocument11 pagesIntroduction To Magnetic Flow MetersNïkĦïl ДkДvØØrNo ratings yet
- Chemical Process Retrofitting and Revamping: Techniques and ApplicationsFrom EverandChemical Process Retrofitting and Revamping: Techniques and ApplicationsGade Pandu RangaiahNo ratings yet
- Distributed Computer Control System: Proceedings of the IFAC Workshop, Tampa, Florida, U.S.A., 2-4 October 1979From EverandDistributed Computer Control System: Proceedings of the IFAC Workshop, Tampa, Florida, U.S.A., 2-4 October 1979T. J. HarrisonNo ratings yet
- Lfaa 101, 102Document12 pagesLfaa 101, 102Đỗ Xuân Bằng0% (1)
- Dokumen - Tips - Novar Controller Brochure PDFDocument8 pagesDokumen - Tips - Novar Controller Brochure PDFArma ArzuNo ratings yet
- chromotagram-BTU CalculationDocument4 pageschromotagram-BTU CalculationDev0009No ratings yet
- ChromotogramDocument2 pagesChromotogramDev0009No ratings yet
- ListDocument44 pagesListDev0009No ratings yet
- Series LoadSharingDocument16 pagesSeries LoadSharingDev0009No ratings yet
- 1 - Compressors and Surge Control Rev0 - C - S5VDocument103 pages1 - Compressors and Surge Control Rev0 - C - S5VDev0009100% (1)
- Theory of Wire DrawingDocument27 pagesTheory of Wire Drawinggamini ranaweera80% (5)
- Gas Turbine 5Document36 pagesGas Turbine 5anup_nairNo ratings yet
- Basics Pressure MeasurementDocument17 pagesBasics Pressure MeasurementDev0009No ratings yet
- Intelligent Access Control System by Yusuph KileoDocument96 pagesIntelligent Access Control System by Yusuph KileoYusuph KileoNo ratings yet
- Terms of Reference FORDocument17 pagesTerms of Reference FORNader MehdawiNo ratings yet
- Software Development: Trial Use StandardDocument230 pagesSoftware Development: Trial Use Standarddcartwright_ok100% (1)
- The Rails and Hotwire Codex PreviewDocument86 pagesThe Rails and Hotwire Codex PreviewalxfromplanetxNo ratings yet
- QuickjsDocument21 pagesQuickjsjuanperezrodriguez958No ratings yet
- SOA Programming Model Physical ArchitectureDocument45 pagesSOA Programming Model Physical Architectureprasadpandit123No ratings yet
- Today: Distributed Objects: Case Study: Ejbs (Enterprise Java Beans) Case Study: CorbaDocument15 pagesToday: Distributed Objects: Case Study: Ejbs (Enterprise Java Beans) Case Study: CorbaSan Lizas AirenNo ratings yet
- Mono DotGNUDocument4 pagesMono DotGNUMohan Ram SNo ratings yet
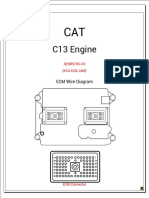
- CAT - C11 (All Engines)Document6 pagesCAT - C11 (All Engines)Phil B.No ratings yet
- IEC 61511 SIL Assessment and IEC 61508 SIL Verification 4-Day TrainingDocument2 pagesIEC 61511 SIL Assessment and IEC 61508 SIL Verification 4-Day TrainingMuhammad.Saim100% (1)
- Uml Notes by Shaik Bilal AhmedDocument10 pagesUml Notes by Shaik Bilal AhmedShaik Bilal AhmedNo ratings yet
- SWEG3091 Software Architecture DesignDocument65 pagesSWEG3091 Software Architecture Designsibhat mequanintNo ratings yet
- Women Safety Alert System: Project Proposal OnDocument13 pagesWomen Safety Alert System: Project Proposal OnHyy NepalNo ratings yet
- SBCF Ils-T-Rwy-16 Iac 20200102 PDFDocument1 pageSBCF Ils-T-Rwy-16 Iac 20200102 PDFMatheus Ekermann PachecoNo ratings yet
- ADS-B Introduction SEA/BOB ADS-B WG/8 - SP/1Document35 pagesADS-B Introduction SEA/BOB ADS-B WG/8 - SP/1rizqramadhani3385No ratings yet
- Adf Aap - 7001 054Document510 pagesAdf Aap - 7001 054Antonio FernandezNo ratings yet
- Iso 26262 1 2018Document42 pagesIso 26262 1 2018OUSSAMA ELHJOUJI100% (1)
- CD & DevOps On Security Compliance PDFDocument120 pagesCD & DevOps On Security Compliance PDFMiroNo ratings yet
- 06-fc1664 Catalyst Missing - Condition Exists.Document3 pages06-fc1664 Catalyst Missing - Condition Exists.SuryadiNo ratings yet
- Interview QuestionsDocument50 pagesInterview QuestionsRemoMeansRemoNo ratings yet
- Appian Developer with 4+ years experience building insurance and financial applicationsDocument4 pagesAppian Developer with 4+ years experience building insurance and financial applicationsArchana SinghNo ratings yet
- UML & Tool IntroductionDocument29 pagesUML & Tool IntroductionOğuzhan ErtekinNo ratings yet
- FYP SRS For E TailoringDocument9 pagesFYP SRS For E TailoringMuhammad SaqibNo ratings yet
- Wire Harness Lifecycle Management: TeamcenterDocument3 pagesWire Harness Lifecycle Management: TeamcenterMos CraciunNo ratings yet
- Yii Guide 2.0 enDocument596 pagesYii Guide 2.0 ensandi hermawanNo ratings yet
- Injectores S 60 PDFDocument18 pagesInjectores S 60 PDFfranciscoNo ratings yet
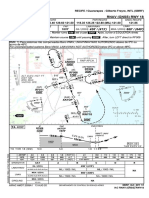
- SBRF - Rnav Gnss Rwy 18 - Iac - 20200813Document1 pageSBRF - Rnav Gnss Rwy 18 - Iac - 20200813Ricardo PalermoNo ratings yet
- Professional Diploma in Python Programming Starter PackDocument5 pagesProfessional Diploma in Python Programming Starter PackPratibha SrivastavaNo ratings yet
- CSA 311 Functional Security Assessment For ComponeDocument42 pagesCSA 311 Functional Security Assessment For ComponenedaNo ratings yet
- Lab 1 - SchemaDocument4 pagesLab 1 - SchemaAlbert ProNo ratings yet