You might also like
- FATEC Mitsubishi QD77 PositiotingDocument342 pagesFATEC Mitsubishi QD77 PositiotingMichealNo ratings yet
- Mitsubishi Ladder TestDocument170 pagesMitsubishi Ladder TestMicheal0% (1)
- GitHub - Quozd - Awesome-Dotnet - A Collection of Awesome .NET Libraries, Tools, Frameworks and SoftwareDocument22 pagesGitHub - Quozd - Awesome-Dotnet - A Collection of Awesome .NET Libraries, Tools, Frameworks and SoftwareMichealNo ratings yet
- Third Periodical Test in Mathematics 7Document3 pagesThird Periodical Test in Mathematics 7Gemarie CabelaNo ratings yet
- Distance and Midpoint FormulaDocument18 pagesDistance and Midpoint FormulaWrath100% (1)
- GRADE 7 - MATH REVIEWER in Geometry PDFDocument6 pagesGRADE 7 - MATH REVIEWER in Geometry PDFLiam DeeCeeNo ratings yet
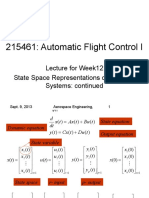
- 215461: Automatic Flight Control I: Lecture For Week12 State Space Representations of Dynamic Systems: ContinuedDocument73 pages215461: Automatic Flight Control I: Lecture For Week12 State Space Representations of Dynamic Systems: ContinuedNumkang KangNo ratings yet
- ENG 233 Lecture Notes 3Document5 pagesENG 233 Lecture Notes 3David Mitry ThomasNo ratings yet
- MAT 241-Calculus 3 - Prof. Santilli Toughloves Chapter 13Document3 pagesMAT 241-Calculus 3 - Prof. Santilli Toughloves Chapter 13Gerardo Mendoza RicaudNo ratings yet
- 6 Kinematics Velocity Kinematics The JacobianDocument77 pages6 Kinematics Velocity Kinematics The JacobianThảo DươngNo ratings yet
- Inverted PendulumDocument28 pagesInverted Pendulumlaluseban100% (1)
- Formula SheetDocument4 pagesFormula Sheetgeyoxi5098No ratings yet
- 5vector FunctionDocument24 pages5vector FunctionNur HannaNo ratings yet
- Bergman5 36Document3 pagesBergman5 36Siddabathula MaheshNo ratings yet
- Formula Sheet FinalDocument3 pagesFormula Sheet FinalNawwafNo ratings yet
- Vector Differential CalculusDocument28 pagesVector Differential CalculusLAKSHMISH S HEGDENo ratings yet
- Aerial Robotics Week3Document119 pagesAerial Robotics Week3tiagosazevedoNo ratings yet
- 21 Moving Trihedral PDFDocument19 pages21 Moving Trihedral PDFJemilene DeimoyNo ratings yet
- Electrodynamics 2Document2 pagesElectrodynamics 2Jiban PokhrelNo ratings yet
- Atmospheric Gravity WavesDocument20 pagesAtmospheric Gravity WavesHenry Zegarra RodriguezNo ratings yet
- Quiz1 B AnsDocument6 pagesQuiz1 B Ansa0905585110No ratings yet
- Reshu Tyagi Prof. JaimalaDocument53 pagesReshu Tyagi Prof. JaimalaReshu TyagiNo ratings yet
- Hydrodynamic Characteristics of PropellersDocument16 pagesHydrodynamic Characteristics of Propellerseraz11No ratings yet
- MIT8 - 07F12 - ln16 - RadiationDocument25 pagesMIT8 - 07F12 - ln16 - RadiationFERNANDO FLORES DE ANDANo ratings yet
- Lecture 2Document19 pagesLecture 2miscellaneoususe01No ratings yet
- Quiz1 A AnsDocument5 pagesQuiz1 A Ansa0905585110No ratings yet
- PhysicsDocument40 pagesPhysicsSanjiv KumarNo ratings yet
- Dynamics of The Synchronous Machine: ELEC0047 - Power System Dynamics, Control and StabilityDocument50 pagesDynamics of The Synchronous Machine: ELEC0047 - Power System Dynamics, Control and StabilityLawiii KkkNo ratings yet
- Chapter 13 PDFDocument74 pagesChapter 13 PDFSiddharth GandhiNo ratings yet
- CS274: Computer Animation and Simulation: Rigid Body DynamicsDocument36 pagesCS274: Computer Animation and Simulation: Rigid Body DynamicsRaja KashmiriNo ratings yet
- Rangkuman Tabel Sistem Dinamik Listrik Dan Mekanik: Indrazno SiradjuddinDocument2 pagesRangkuman Tabel Sistem Dinamik Listrik Dan Mekanik: Indrazno SiradjuddinWiliam AhmadNo ratings yet
- Fourier Transform PropertiesDocument1 pageFourier Transform PropertiessightlesswarriorNo ratings yet
- CS274: Computer Animation and Simulation: Rigid Body DynamicsDocument36 pagesCS274: Computer Animation and Simulation: Rigid Body DynamicsAyub MohamedNo ratings yet
- An Atlas of Engineering Dynamic Systems, Models, and Transfer FunctionsDocument37 pagesAn Atlas of Engineering Dynamic Systems, Models, and Transfer Functionshazem ab2009No ratings yet
- General Formula of ReliabilityDocument2 pagesGeneral Formula of ReliabilityMuhammad Reza Pradecta100% (1)
- Rel 3Document19 pagesRel 3burakNo ratings yet
- Block Diagram and Transfer FunctionsDocument20 pagesBlock Diagram and Transfer FunctionsBatuhan Mutlugil 'Duman'No ratings yet
- Chapter 4.1 Response Ist Order SystemsDocument35 pagesChapter 4.1 Response Ist Order SystemsShah AdnanNo ratings yet
- Electromagnetic Field On Antenna-Eng+ItaDocument64 pagesElectromagnetic Field On Antenna-Eng+ItaLeonardo RubinoNo ratings yet
- T T - It's Laplace Transform Is F (T), As Illustrated F (T) ) F (S)Document4 pagesT T - It's Laplace Transform Is F (T), As Illustrated F (T) ) F (S)Aravind VinasNo ratings yet
- Sinusoids, Phasors, and Steady-State AnalysisDocument53 pagesSinusoids, Phasors, and Steady-State AnalysisryanNo ratings yet
- Unit 4 Torsion ProblemsDocument19 pagesUnit 4 Torsion ProblemsAnonymous mRBbdopMKfNo ratings yet
- VelocityDocument16 pagesVelocityhimanshu10092004No ratings yet
- 10.rotational 3Document5 pages10.rotational 3PHYSICS LSNo ratings yet
- Baze University Abuja: MTH 103:geometry Part Iii: DynamicsDocument58 pagesBaze University Abuja: MTH 103:geometry Part Iii: DynamicsNabil-babayo WANKANo ratings yet
- M2-2 Kinematika Dua Dimensi Gerak Parabola Dan Gerak MelingkarDocument118 pagesM2-2 Kinematika Dua Dimensi Gerak Parabola Dan Gerak MelingkarAulia Mi'rajNo ratings yet
- Q QV QR W MDocument4 pagesQ QV QR W Mjrobs314No ratings yet
- Greens Functions: Dr. Imalie Gamalath Dept. of Phys University of Colombo (Sri Lanka)Document50 pagesGreens Functions: Dr. Imalie Gamalath Dept. of Phys University of Colombo (Sri Lanka)A1973rayNo ratings yet
- Kinematika Dengan Analisis VektorDocument10 pagesKinematika Dengan Analisis VektorFathur RabbaniNo ratings yet
- Formula Sheet University PhysicsDocument3 pagesFormula Sheet University Physicsanon_616439356No ratings yet
- Theory: English (Official)Document4 pagesTheory: English (Official)Bentley CarrNo ratings yet
- 2017 07 19 - T1 ProblemsDocument5 pages2017 07 19 - T1 ProblemstanzimNo ratings yet
- Section 13.2 Derivatives and Integrals of Vector FunctionsDocument3 pagesSection 13.2 Derivatives and Integrals of Vector FunctionsAlvin AdityaNo ratings yet
- Introduction To Mobile Robotics: Wheeled LocomotionDocument20 pagesIntroduction To Mobile Robotics: Wheeled Locomotionsaesaria17No ratings yet
- Normal and Tangential Components of Acceleration (: Lecture 13 - Monday, April 28Document6 pagesNormal and Tangential Components of Acceleration (: Lecture 13 - Monday, April 28Parag NandiNo ratings yet
- Coriolis - It's All Maths' Fault-Eng - ItaDocument8 pagesCoriolis - It's All Maths' Fault-Eng - ItaLeonardo RubinoNo ratings yet
- Bounded Analytic Functions and Bloch Space: The LittleDocument6 pagesBounded Analytic Functions and Bloch Space: The Little贾政No ratings yet
- Analog and Digital I/Q ModulationDocument16 pagesAnalog and Digital I/Q ModulationRui CarvalhoNo ratings yet
- Reconstruction PDFDocument13 pagesReconstruction PDFRamaDinakaranNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Irregular Verb PageDocument15 pagesIrregular Verb PageMichealNo ratings yet
- Windows 7 DLL File Information - User32.dllDocument12 pagesWindows 7 DLL File Information - User32.dllMichealNo ratings yet
- Basics of Screw TheoryDocument16 pagesBasics of Screw TheoryMichealNo ratings yet
- Laser Solutions: Automotive EditionDocument8 pagesLaser Solutions: Automotive EditionMichealNo ratings yet
- PC Acces Ethernet Link PDFDocument4 pagesPC Acces Ethernet Link PDFjagadeesh.bammidiNo ratings yet
- PC Acces Ethernet LinkDocument7 pagesPC Acces Ethernet LinkMichealNo ratings yet
- Siemens Scalance w788x 748 1 en UsDocument40 pagesSiemens Scalance w788x 748 1 en UsMichealNo ratings yet
- Scan To E-MailDocument6 pagesScan To E-MailMichealNo ratings yet
- Brochure Panels enDocument17 pagesBrochure Panels enngdaviloNo ratings yet
- Aa Sss and Sas SimilarityDocument24 pagesAa Sss and Sas SimilarityJay Jexter SeldaNo ratings yet
- Crystallography 3Document2 pagesCrystallography 3Akshay KumarNo ratings yet
- Subject-Mathematics, Class-Ix Circles: Worksheet (Basic)Document7 pagesSubject-Mathematics, Class-Ix Circles: Worksheet (Basic)sanjayb1976gmailcomNo ratings yet
- Answer Key - CK-12 Chapter 01 Trigonometry Concepts 052119 PDFDocument29 pagesAnswer Key - CK-12 Chapter 01 Trigonometry Concepts 052119 PDFJericho Luiz Sipin RamosNo ratings yet
- Grand Test: Maths: Class: 7 Max. Marks: 50 Name: DateDocument3 pagesGrand Test: Maths: Class: 7 Max. Marks: 50 Name: Datebilal sheikhNo ratings yet
- Trigonometry SheetDocument4 pagesTrigonometry SheetKelah AligNo ratings yet
- ",/I/L@L/I!L! 6: Rohrwerk Agitator Agitateur AgitadorDocument2 pages",/I/L@L/I!L! 6: Rohrwerk Agitator Agitateur AgitadorVijay BhureNo ratings yet
- 6 4properties of Special Parallelograms - PPSXDocument38 pages6 4properties of Special Parallelograms - PPSXFrances DayondonNo ratings yet
- Tugas 3 Geo Analitik Bidang Dan RuangDocument3 pagesTugas 3 Geo Analitik Bidang Dan RuangPHELIPUS MERENo ratings yet
- 13-Medians of Triangles ConstructionsDocument4 pages13-Medians of Triangles ConstructionsAymenNo ratings yet
- Ccgps CRCT Math 7th Grade Geometry Review PacketDocument9 pagesCcgps CRCT Math 7th Grade Geometry Review PacketOishin MariscalNo ratings yet
- Hyperbolic TreeDocument2 pagesHyperbolic Treecharlotte899No ratings yet
- Blueprint ProjectDocument2 pagesBlueprint ProjectAlina KuryloNo ratings yet
- Solid GeometryDocument30 pagesSolid GeometryRohclem Dela CruzNo ratings yet
- Hippocrates: TellsDocument1 pageHippocrates: Tellsapi-444439435No ratings yet
- 30 2 3 Maths StandardDocument23 pages30 2 3 Maths Standardanirban7172No ratings yet
- 8-Multi-Step Special Right TrianglesDocument4 pages8-Multi-Step Special Right Trianglesapi-294153157No ratings yet
- Robot Kinematics: - Spatial Descriptions and Transformations - Introduction To MotionDocument24 pagesRobot Kinematics: - Spatial Descriptions and Transformations - Introduction To MotionSehzadNo ratings yet
- Assignment Math KKTM KEMAMANDocument26 pagesAssignment Math KKTM KEMAMANMUKMININ MIKUNo ratings yet
- Butterfly TrigonometryDocument4 pagesButterfly Trigonometryneiljain421No ratings yet
- G13 1951 PUTNAM Web SolutionDocument14 pagesG13 1951 PUTNAM Web SolutionmokonoaniNo ratings yet
- Crystallography Symmetry ElementsDocument11 pagesCrystallography Symmetry Elementsmarcelo VieiraNo ratings yet
- CAT Exam - Quants - (4) GeometryDocument1 pageCAT Exam - Quants - (4) GeometryMaths magnusNo ratings yet
- Sheet 5Document1 pageSheet 5Philip PattersonNo ratings yet
- Fire Hydrant Ref. Elevation 10.00M: Existing CHB FenceDocument1 pageFire Hydrant Ref. Elevation 10.00M: Existing CHB FenceUmali De Castro NhelNo ratings yet
- Corresponding Angles and Alternate Angles Questions MMEDocument7 pagesCorresponding Angles and Alternate Angles Questions MMESouvik GhoshNo ratings yet
- 2.4: Finding The Sum of Interior Angles of Polygons (Worksheet)Document3 pages2.4: Finding The Sum of Interior Angles of Polygons (Worksheet)Dorsey MathleteNo ratings yet