You might also like
- Applied Mathematical Sciences: SpringerDocument288 pagesApplied Mathematical Sciences: SpringerAngela Camila SanchezNo ratings yet
- A Simple Saddlepoint Approximation For The Equilibrium Distribution of The Stochastic Logistic Model of Population GrowthDocument10 pagesA Simple Saddlepoint Approximation For The Equilibrium Distribution of The Stochastic Logistic Model of Population GrowthAngela Camila SanchezNo ratings yet
- Goffman C., Pedrick G. - First Course in Functional analysis-PH (1965)Document295 pagesGoffman C., Pedrick G. - First Course in Functional analysis-PH (1965)Angela Camila SanchezNo ratings yet
- 1212 6206Document52 pages1212 6206akhil akkiNo ratings yet
- Giesl2004 PDFDocument35 pagesGiesl2004 PDFAngela Camila SanchezNo ratings yet
- Accepted Manuscript: Appl. Math. ModellingDocument34 pagesAccepted Manuscript: Appl. Math. ModellingAngela Camila SanchezNo ratings yet
- Nonlinear Analysis: Real World Applications: Weiming Wang, Ya-Nuo Zhu, Yongli Cai, Wenjuan WangDocument17 pagesNonlinear Analysis: Real World Applications: Weiming Wang, Ya-Nuo Zhu, Yongli Cai, Wenjuan WangAngela Camila SanchezNo ratings yet
- LCDocument6 pagesLCGuilherme Brolin GatoNo ratings yet
- Solution11 Inner ProductDocument5 pagesSolution11 Inner ProductAngela Camila SanchezNo ratings yet
- Bases - de - Polinomios PDFDocument9 pagesBases - de - Polinomios PDFAngela Camila SanchezNo ratings yet
- Solution11 Inner ProductDocument5 pagesSolution11 Inner ProductAngela Camila SanchezNo ratings yet
- Bases - de - Polinomios PDFDocument9 pagesBases - de - Polinomios PDFAngela Camila SanchezNo ratings yet
- Networks and Epidemic ModelsDocument14 pagesNetworks and Epidemic ModelsAngela Camila SanchezNo ratings yet
- Meeting Strangers and Friends of Friends PDFDocument26 pagesMeeting Strangers and Friends of Friends PDFAngela Camila SanchezNo ratings yet
- Dymanic Spread HappinessDocument9 pagesDymanic Spread HappinessGrupul Scolar Santana SantanaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Electronic Temperature Switch ETS 1700: User ManualDocument15 pagesElectronic Temperature Switch ETS 1700: User ManualНикита ЛесюкNo ratings yet
- Asco Series 042 Gas Shutoff CatalogDocument4 pagesAsco Series 042 Gas Shutoff CatalogRoqueNetNo ratings yet
- Workspace Satisfaction - The Privacy-Communication Trade-Off in Open-Plan OfficesDocument9 pagesWorkspace Satisfaction - The Privacy-Communication Trade-Off in Open-Plan OfficesAyşe Nur TürkerNo ratings yet
- G12 NCERT Unit-14 BiomoleculesDocument15 pagesG12 NCERT Unit-14 Biomoleculescherryakila05No ratings yet
- Western Dragon V3 Updated PDFDocument19 pagesWestern Dragon V3 Updated PDFMark Moldez94% (17)
- 3L11/3F11 SERIES / " Bimetal Disc ThermostatsDocument2 pages3L11/3F11 SERIES / " Bimetal Disc ThermostatsBuitinės Technikos RemontasNo ratings yet
- Visit Braindump2go and Download Full Version 350-801 Exam DumpsDocument4 pagesVisit Braindump2go and Download Full Version 350-801 Exam DumpsArsic AleksandarNo ratings yet
- Resume 2Document5 pagesResume 2api-265700012No ratings yet
- PHYSICS Lab Manual - 2023-24Document30 pagesPHYSICS Lab Manual - 2023-24Vinushree Santhoshkumar100% (4)
- Teacher PPT - Scientific RevolutionDocument13 pagesTeacher PPT - Scientific Revolutionapi-441776741No ratings yet
- S/Mime (Secure/Multipurpose Internet Mail Extensions)Document15 pagesS/Mime (Secure/Multipurpose Internet Mail Extensions)Vishnupriya100% (1)
- Central Tendency, Position, and VariationDocument37 pagesCentral Tendency, Position, and VariationCeline Joy PolicarpioNo ratings yet
- DigfiltDocument237 pagesDigfiltJuhi SinghNo ratings yet
- Statics and Mechanics of Materials 3Rd Edition Full ChapterDocument41 pagesStatics and Mechanics of Materials 3Rd Edition Full Chapterjason.rabil982100% (29)
- Air Pollutants Transport ModelsDocument12 pagesAir Pollutants Transport ModelsRahul DandautiyaNo ratings yet
- Ordinal Logistic Regression: 13.1 BackgroundDocument15 pagesOrdinal Logistic Regression: 13.1 BackgroundShan BasnayakeNo ratings yet
- DSI - MPS® Transfer System Compact Trainer I4.0 - EN - DID1089 (Screen)Document2 pagesDSI - MPS® Transfer System Compact Trainer I4.0 - EN - DID1089 (Screen)mhafizanNo ratings yet
- Oracle Process Manufacturing Master SetupsDocument42 pagesOracle Process Manufacturing Master SetupsMadhuri Uppala100% (2)
- Science July Assignment Grade 8Document3 pagesScience July Assignment Grade 8G PNo ratings yet
- EagleBurgmann - API682 4th Facts, Innovations, SolutionsDocument26 pagesEagleBurgmann - API682 4th Facts, Innovations, SolutionsTasawwur Tahir100% (1)
- Transom Analysis ComparisonDocument38 pagesTransom Analysis ComparisonRifky NetriadyNo ratings yet
- Computer MCQ Test For Nts 4,5,6Document1 pageComputer MCQ Test For Nts 4,5,6Mohsan NaqiNo ratings yet
- Scopus Crystal NeedleDocument256 pagesScopus Crystal NeedleDr. Ramchandra Gosavi PatilNo ratings yet
- Cryogenic SteelDocument18 pagesCryogenic SteelMuhammad RizkiNo ratings yet
- Dewatering Screens: Single-Deck Twin VibratorDocument8 pagesDewatering Screens: Single-Deck Twin Vibratorekrem0867No ratings yet
- Laboratory Work 1 Computation of Metrics of Productivity of Computer SystemDocument12 pagesLaboratory Work 1 Computation of Metrics of Productivity of Computer SystemHhhhhh75% (4)
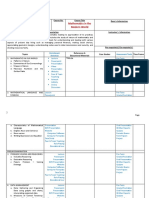
- Mathematics in The Modern World: Course No. Course Title Dean's InformationDocument5 pagesMathematics in The Modern World: Course No. Course Title Dean's InformationJayson SantelicesNo ratings yet
- Deflection of BeamsDocument109 pagesDeflection of BeamsNadir Khattak Jr.100% (1)
- D 880 - 92 R97 Rdg4mc05mli5nw - PDFDocument4 pagesD 880 - 92 R97 Rdg4mc05mli5nw - PDFomar alvaradoNo ratings yet
- Zott Business ModelDocument25 pagesZott Business ModelNico LightNo ratings yet