You might also like
- cs188 Fa22 Lec03Document36 pagescs188 Fa22 Lec03Yasmine Amina MoudjarNo ratings yet
- Cs188-Sp23-Lec07 CSPDocument37 pagesCs188-Sp23-Lec07 CSPkhanhlinhkstndtvtk57No ratings yet
- Constraint Satisfaction Problems: Foundations of Artificial IntelligenceDocument62 pagesConstraint Satisfaction Problems: Foundations of Artificial Intelligence林佳緯No ratings yet
- CSE 473: Artificial Intelligence: Backtracking SearchDocument17 pagesCSE 473: Artificial Intelligence: Backtracking Searchsimionesei.loredanaNo ratings yet
- Lec 4Document33 pagesLec 4Vân AnhNo ratings yet
- CS 188: Artificial Intelligence: Constraint Satisfaction ProblemsDocument43 pagesCS 188: Artificial Intelligence: Constraint Satisfaction ProblemsSufi NoraniNo ratings yet
- Sp14 Cs188 Lecture 4 - Csps IDocument43 pagesSp14 Cs188 Lecture 4 - Csps IYash OzaNo ratings yet
- cs188 Fa22 Lec04Document50 pagescs188 Fa22 Lec04Yasmine Amina MoudjarNo ratings yet
- Lec 5Document51 pagesLec 5Vân AnhNo ratings yet
- 5 CSPDocument36 pages5 CSPPratik Pradip SarodeNo ratings yet
- Aifa 9 CSP 120923Document19 pagesAifa 9 CSP 120923Das SkrillexNo ratings yet
- Russell & Norvig Ch. 5: - Constraint Satisfaction Offers A Powerful Problem-Solving ParadigmDocument20 pagesRussell & Norvig Ch. 5: - Constraint Satisfaction Offers A Powerful Problem-Solving ParadigmirinarmNo ratings yet
- Lec08 csp2Document29 pagesLec08 csp2sowdaga mustafizur rahmanNo ratings yet
- Constraint Satisfaction Problems IIDocument35 pagesConstraint Satisfaction Problems IIHuyCườngNo ratings yet
- Artificial Intelligence: Constraint Satisfaction ProblemsDocument51 pagesArtificial Intelligence: Constraint Satisfaction Problemssurya kiranNo ratings yet
- Constraint Satisfaction ProblemsDocument42 pagesConstraint Satisfaction ProblemsShrikant SaxenaNo ratings yet
- Lec05 - CSPs IIDocument38 pagesLec05 - CSPs IIdatakplaNo ratings yet
- Constraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelDocument55 pagesConstraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelRonaldo PitersonNo ratings yet
- Constraint Satisfaction Problems (CSP)Document36 pagesConstraint Satisfaction Problems (CSP)ShamsNo ratings yet
- Constraint Satisfaction ProblemsDocument42 pagesConstraint Satisfaction Problemsjiminisinbts02No ratings yet
- Constraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Document55 pagesConstraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Gomathi ShanmugamNo ratings yet
- Constraint SatDocument57 pagesConstraint SatJetlin C PNo ratings yet
- Name: R.Viswaesvaran - Class: 11a - Sns AcademyDocument22 pagesName: R.Viswaesvaran - Class: 11a - Sns AcademyViswa DexterNo ratings yet
- Lecture5 CSPs IIDocument7 pagesLecture5 CSPs IIMamunur RashidNo ratings yet
- AI-Lecture 7 (Constraint Satisfaction Problems)Document60 pagesAI-Lecture 7 (Constraint Satisfaction Problems)Yna ForondaNo ratings yet
- Artificial Intelligence: Russell & Norvig, AI: A Modern Approach, 3rd EdDocument40 pagesArtificial Intelligence: Russell & Norvig, AI: A Modern Approach, 3rd EdRafinNo ratings yet
- A General Introduction To Artificial IntelligenceDocument58 pagesA General Introduction To Artificial IntelligenceÁnh PhạmNo ratings yet
- c6 ConstraintsDocument42 pagesc6 ConstraintsSamir SabryNo ratings yet
- Constraint SatisfactionDocument27 pagesConstraint SatisfactionRaghu SomuNo ratings yet
- 5 CSPDocument70 pages5 CSPGUNEET SURANo ratings yet
- 4 CSP IntroDocument27 pages4 CSP Introyaserif915No ratings yet
- Sp14 Cs188 Lecture 5 - Csps IIDocument38 pagesSp14 Cs188 Lecture 5 - Csps IIimoptra143No ratings yet
- Constraint Satisfaction Problems: Unit 3Document28 pagesConstraint Satisfaction Problems: Unit 3youtube channelNo ratings yet
- Constraint Satisfaction Problems: Prof. Abbas AL-BakriDocument41 pagesConstraint Satisfaction Problems: Prof. Abbas AL-BakriIhab AmerNo ratings yet
- CSPDocument9 pagesCSPSrinivas VemuriNo ratings yet
- Constraint Satisfaction Problems: Section 1 - 3Document36 pagesConstraint Satisfaction Problems: Section 1 - 3Anonymous 2C9l3iQNo ratings yet
- Constraint Satisfaction Problems IIDocument30 pagesConstraint Satisfaction Problems IIHuyCườngNo ratings yet
- Lec07 ConstraintsatisfactionDocument46 pagesLec07 ConstraintsatisfactionMD AminNo ratings yet
- CspsDocument33 pagesCspsArthy JNo ratings yet
- 2014wq171 08 ConstraintSatisfactionDocument106 pages2014wq171 08 ConstraintSatisfactionTrương Thuận KiệtNo ratings yet
- Constraint Satisfaction ProblemDocument43 pagesConstraint Satisfaction ProblemLucky Asr AwaisNo ratings yet
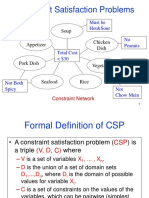
- Constraint Satisfaction Problems: Soup Chicken Dish AppetizerDocument45 pagesConstraint Satisfaction Problems: Soup Chicken Dish AppetizerAyush SethiNo ratings yet
- CspsDocument52 pagesCspsJetlin C PNo ratings yet
- AI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningDocument11 pagesAI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningSaranya NarayanasettiNo ratings yet
- Trí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsDocument33 pagesTrí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsVăn Lâm TrầnNo ratings yet
- Behavioral Verilog and Timescale: ECE 551 Discussion 2/18/03Document5 pagesBehavioral Verilog and Timescale: ECE 551 Discussion 2/18/03priyajeejoNo ratings yet
- Constraint Satisfaction Problems: Slides by Prof WELLINGDocument39 pagesConstraint Satisfaction Problems: Slides by Prof WELLINGProf. AHMED RIMAZ FAIZABADINo ratings yet
- Lecture 6aDocument54 pagesLecture 6aSadia NiazNo ratings yet
- Offline 2 CSPDocument16 pagesOffline 2 CSPDebojit PanditNo ratings yet
- Dynamic Programming and Single Word Recognizers (Part 1)Document25 pagesDynamic Programming and Single Word Recognizers (Part 1)Kumar BittuNo ratings yet
- Unit 2 Constraint Satisfaction ProblemsDocument52 pagesUnit 2 Constraint Satisfaction ProblemsManthan BosamiyaNo ratings yet
- 11 - CSPDocument40 pages11 - CSPSupriya NevewaniNo ratings yet
- CSP Example: Map Coloring: Constraint Satisfaction Problems (CSPS)Document11 pagesCSP Example: Map Coloring: Constraint Satisfaction Problems (CSPS)Alvin SibayanNo ratings yet
- Aifa 8 CSP 110923Document14 pagesAifa 8 CSP 110923Das SkrillexNo ratings yet
- Announcements: Homework 1Document51 pagesAnnouncements: Homework 1Roberto ThaisNo ratings yet
- Constraint Satisfaction ProblemsDocument40 pagesConstraint Satisfaction Problemsapi-19801502No ratings yet
- Lecture 11Document55 pagesLecture 11roboganowo24No ratings yet
- DL6 - Convnets 4Document57 pagesDL6 - Convnets 4razifa0No ratings yet
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- Lecture8 MDPs IIDocument8 pagesLecture8 MDPs IIMamunur RashidNo ratings yet
- Lecture 2 - Uniformed SearchDocument50 pagesLecture 2 - Uniformed SearchMamunur RashidNo ratings yet
- Lecture6 Adversarial SearchDocument8 pagesLecture6 Adversarial SearchMamunur RashidNo ratings yet
- Lecture7 MDPs IDocument9 pagesLecture7 MDPs IMamunur RashidNo ratings yet
- Lecture5 CSPs IIDocument7 pagesLecture5 CSPs IIMamunur RashidNo ratings yet
- Lecture 1 - IntroDocument8 pagesLecture 1 - IntroMamunur RashidNo ratings yet
- (StudentID-1811562128) (Name-SAAD SHARIAR) Software Design PatternDocument5 pages(StudentID-1811562128) (Name-SAAD SHARIAR) Software Design PatternMamunur RashidNo ratings yet
- Rashid MD Mamunur - 1811562126 - HCI Term PaperDocument24 pagesRashid MD Mamunur - 1811562126 - HCI Term PaperMamunur RashidNo ratings yet
- Hotel Booking System: Name: Kamruzzaman Md (叶本领) ID: 1811562117Document14 pagesHotel Booking System: Name: Kamruzzaman Md (叶本领) ID: 1811562117Mamunur RashidNo ratings yet
- Farid (刘睿) 1811561147 DBMS Template-part 2Document30 pagesFarid (刘睿) 1811561147 DBMS Template-part 2Mamunur RashidNo ratings yet
- DBMS ER Guidance-1的副本Document9 pagesDBMS ER Guidance-1的副本Mamunur RashidNo ratings yet
- Instruction For Term Paper - HCIDocument1 pageInstruction For Term Paper - HCIMamunur RashidNo ratings yet
- DBMS Exercise Final TemplateDocument27 pagesDBMS Exercise Final TemplateMamunur RashidNo ratings yet
- Student Name: ZUBAYER S M Chinese name: Class: 19Lc 软工 Grade: Due: Mar. 16, 2021 TutorDocument3 pagesStudent Name: ZUBAYER S M Chinese name: Class: 19Lc 软工 Grade: Due: Mar. 16, 2021 TutorMamunur RashidNo ratings yet
- Exercise 2: Due: Apr. 27, 2022Document3 pagesExercise 2: Due: Apr. 27, 2022Mamunur RashidNo ratings yet
- Hubei University of Technology (HBUT) : Name: Rashid Md Mamunur (潘安) Student Id: 1811562126 Class: 19lc 软工 Assignment: 1Document4 pagesHubei University of Technology (HBUT) : Name: Rashid Md Mamunur (潘安) Student Id: 1811562126 Class: 19lc 软工 Assignment: 1Mamunur RashidNo ratings yet
- Algorithms Analysis and Design 试题/Test Paper: Hubei University of TechnologyDocument3 pagesAlgorithms Analysis and Design 试题/Test Paper: Hubei University of TechnologyMamunur RashidNo ratings yet
- Homework 1Document1 pageHomework 1Mamunur RashidNo ratings yet
- Exercise1 - 1811562126 - Rashid Md Mamunur (潘安)Document4 pagesExercise1 - 1811562126 - Rashid Md Mamunur (潘安)Mamunur RashidNo ratings yet
- Data Mining & Data Warehouse : Hubei University of Technology (HBUT)Document5 pagesData Mining & Data Warehouse : Hubei University of Technology (HBUT)Mamunur RashidNo ratings yet
- Hubei University Of Technology: NAME: Kamruzzaman Md (叶本领) ID: 1811562117 Class: 191c 软工Document4 pagesHubei University Of Technology: NAME: Kamruzzaman Md (叶本领) ID: 1811562117 Class: 191c 软工Mamunur RashidNo ratings yet
- Data Mining & Data Warehouse : Hubei University of Technology (HBUT)Document5 pagesData Mining & Data Warehouse : Hubei University of Technology (HBUT)Mamunur RashidNo ratings yet
- The Sign-Up Form For Data Structures Course ExerciseDocument1 pageThe Sign-Up Form For Data Structures Course ExerciseMamunur RashidNo ratings yet
- Course Exercise Guide For Data Structures and AlgorithmsDocument4 pagesCourse Exercise Guide For Data Structures and AlgorithmsMamunur RashidNo ratings yet
- Contribution Form: Group Name Topic Student Name Student Id ContributionDocument1 pageContribution Form: Group Name Topic Student Name Student Id ContributionMamunur RashidNo ratings yet
- The Report TemplateDocument4 pagesThe Report TemplateMamunur RashidNo ratings yet
- Exercise2-System Analysis and DesignDocument2 pagesExercise2-System Analysis and DesignMamunur RashidNo ratings yet
- Hubei University of Technology: Operating Systems Course ExerciseDocument7 pagesHubei University of Technology: Operating Systems Course ExerciseMamunur RashidNo ratings yet
- Exercise 1: Due: Apr. 20, 2022Document3 pagesExercise 1: Due: Apr. 20, 2022Mamunur RashidNo ratings yet
- FOR Function 1 Question 1 Bisection Method: f1 @ (X) 2-X+log (X)Document9 pagesFOR Function 1 Question 1 Bisection Method: f1 @ (X) 2-X+log (X)superman1234No ratings yet
- Division of Polynomials ExercisesDocument4 pagesDivision of Polynomials ExercisesKhang NguyễnNo ratings yet
- Factor & Remainder Theorem CAPE Integrated MathematicsDocument15 pagesFactor & Remainder Theorem CAPE Integrated MathematicsDequanNo ratings yet
- Module B SolutionsDocument13 pagesModule B SolutionsQaisar ShafiqueNo ratings yet
- Assignment - 2 Numerical Solutions of Ordinary and Partial Differential EquationsDocument1 pageAssignment - 2 Numerical Solutions of Ordinary and Partial Differential EquationsManish MeenaNo ratings yet
- 10 MathDocument5 pages10 MathOver LordNo ratings yet
- Convergence of Lagrange Hermite On Unit Circle: AbstractDocument9 pagesConvergence of Lagrange Hermite On Unit Circle: AbstractVarunKanaujiaNo ratings yet
- 4-The Simplex MethodDocument33 pages4-The Simplex MethodAmi awokeNo ratings yet
- CH 06 Slides 4 UpDocument15 pagesCH 06 Slides 4 Upsheeron20No ratings yet
- CH18 Simplex-Based Sensitivity Analysis and DualityDocument54 pagesCH18 Simplex-Based Sensitivity Analysis and DualityTito TitoNo ratings yet
- Matricesanddeterminants PDFDocument100 pagesMatricesanddeterminants PDFamirNo ratings yet
- X and y I.e., For Arguments and Entries Values, and Plot The Different Points On The Graph ForDocument4 pagesX and y I.e., For Arguments and Entries Values, and Plot The Different Points On The Graph ForFinanti Puja DwikasihNo ratings yet
- Solution Manual For Applied Numerical Methods With Matlab For Engineers and Science Chapra 3rd EditionDocument15 pagesSolution Manual For Applied Numerical Methods With Matlab For Engineers and Science Chapra 3rd EditionDouglasWhiteheadxkwi100% (40)
- Classnotes - Coursework of OptimizationDocument14 pagesClassnotes - Coursework of OptimizationHudzaifa AhnafNo ratings yet
- Developing An Excel Spreadsheet Program To Solve Transportation ProblemsDocument9 pagesDeveloping An Excel Spreadsheet Program To Solve Transportation ProblemsDaniel NimabwayaNo ratings yet
- College of Engineering: NGN-509 (Computational Methods For Engineers)Document9 pagesCollege of Engineering: NGN-509 (Computational Methods For Engineers)Mohammed AlmoriseyNo ratings yet
- Logic Gates From MiCOM P14x P141, P142, P143, P144 & P145 Feeder Management Relay Technical Manual-P14xEN MDe6+Gf7Document1 pageLogic Gates From MiCOM P14x P141, P142, P143, P144 & P145 Feeder Management Relay Technical Manual-P14xEN MDe6+Gf7dennyyusufNo ratings yet
- MAD4401 Practice ProblemsDocument9 pagesMAD4401 Practice ProblemsBob CrossNo ratings yet
- Coding of Direct Stiffness MethodDocument2 pagesCoding of Direct Stiffness MethodgrabspNo ratings yet
- Unit Multistep and Predictor Corrector Methods For Solving Initial Value ProblemsDocument27 pagesUnit Multistep and Predictor Corrector Methods For Solving Initial Value ProblemsJAGANNATH PRASADNo ratings yet
- Modified Gauss Elimination MethodDocument3 pagesModified Gauss Elimination MethodIJRASETPublicationsNo ratings yet
- Remainder TheoremDocument2 pagesRemainder TheoremKurarin Jan MaikeruNo ratings yet
- Assignment Problem Using ExcelDocument7 pagesAssignment Problem Using ExcelJoseph George KonnullyNo ratings yet
- TableMix - Group MDocument12 pagesTableMix - Group MDang Phan HaiNo ratings yet
- Introduction To Type TheoryDocument60 pagesIntroduction To Type TheoryArannya MonzurNo ratings yet
- Introduction To HDL: Laboratory No.2Document5 pagesIntroduction To HDL: Laboratory No.2Clint Agustin M. RoblesNo ratings yet
- Finite Difference Method: ME710 Mathematical Methods For Engineers Mechanical Engineering NITK SurathkalDocument20 pagesFinite Difference Method: ME710 Mathematical Methods For Engineers Mechanical Engineering NITK SurathkalSantosh Kumar AgastiNo ratings yet
- Unit5.ipynb - Numerical IntegrationDocument5 pagesUnit5.ipynb - Numerical IntegrationBhikulalJaiswalNo ratings yet
- PEMSIS Bab 14 Kelompok 11 12Document84 pagesPEMSIS Bab 14 Kelompok 11 12Husain SugemaNo ratings yet
- CN 5 Limit of Polynomial and Rational FunctionsDocument2 pagesCN 5 Limit of Polynomial and Rational FunctionsDenise Nicole T. LopezNo ratings yet