You might also like
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Challenges and Solutions of Protecting Variable Speed Drive Motors-NOTA TECNICADocument8 pagesChallenges and Solutions of Protecting Variable Speed Drive Motors-NOTA TECNICAEdgardo Kat ReyesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Application of Multi-Function Motor Protection Relays To Variable Frequency Drive Connected MotorsDocument13 pagesApplication of Multi-Function Motor Protection Relays To Variable Frequency Drive Connected Motorslarry vargas bautistaNo ratings yet
- Differential Protection Strategies For Synchronous Motor:A Case StudyDocument5 pagesDifferential Protection Strategies For Synchronous Motor:A Case StudyMehdi_Mashayekhi_172No ratings yet
- White Paper Advanced Motor Protection Option 06-2019Document9 pagesWhite Paper Advanced Motor Protection Option 06-2019amirhajianNo ratings yet
- Multifunction Motor Protection Relays To VFDDocument13 pagesMultifunction Motor Protection Relays To VFDrian0201No ratings yet
- VFD With BreakerDocument8 pagesVFD With BreakerManish KaushikNo ratings yet
- Use of Motor Protection Circuit Breakers With Variable-Frequency DrivesDocument8 pagesUse of Motor Protection Circuit Breakers With Variable-Frequency DrivesDragonNo ratings yet
- Variable Frequency Drive : Ravikumar .M M.Tech 3 SEM C.A.I.DDocument22 pagesVariable Frequency Drive : Ravikumar .M M.Tech 3 SEM C.A.I.Davi013No ratings yet
- Differential Protection Strategies For Synchronous Motor A Case StudyDocument5 pagesDifferential Protection Strategies For Synchronous Motor A Case StudylocomaniacoNo ratings yet
- Application of VFD in Power Plants: An OverviewDocument68 pagesApplication of VFD in Power Plants: An OverviewKinjalparimal100% (1)
- IJRET V/Hz control of AC induction motorDocument7 pagesIJRET V/Hz control of AC induction motoredi ediNo ratings yet
- Full Paper P-031Document9 pagesFull Paper P-031SUBRATA BISWASNo ratings yet
- Best Presentation On VFDDocument68 pagesBest Presentation On VFDShahid AhmadNo ratings yet
- Variable Frequency Drive and Faults Detection Using MicrocontrollerDocument4 pagesVariable Frequency Drive and Faults Detection Using MicrocontrollerMohammad Safdar SadatNo ratings yet
- General Information For Integral Horsepower (Ihp) Motors On Variable Frequency Drives (VFDS)Document3 pagesGeneral Information For Integral Horsepower (Ihp) Motors On Variable Frequency Drives (VFDS)Ibhar Santos MumentheyNo ratings yet
- Why Use Bypass in Variable Frequency Drive SystemDocument6 pagesWhy Use Bypass in Variable Frequency Drive Systemmani_208eeNo ratings yet
- Power Quality: M V S I o V F DDocument5 pagesPower Quality: M V S I o V F DHari Krishna.MNo ratings yet
- Hydraulic Institute Knowledge Series: Motors & VFDS: Variable Frequency DrivesDocument32 pagesHydraulic Institute Knowledge Series: Motors & VFDS: Variable Frequency DrivesKarin GzaNo ratings yet
- Research To Study Variable Frequency Drive and ItsDocument4 pagesResearch To Study Variable Frequency Drive and ItsPramono MuktiNo ratings yet
- Variable Frequency Drives: Presented By: Rajarshi Ghose Dastidar. ROLL: 149. REGD. NO: 070906360Document54 pagesVariable Frequency Drives: Presented By: Rajarshi Ghose Dastidar. ROLL: 149. REGD. NO: 070906360Rajarshi Ghose Dastidar100% (1)
- NIDECDocument18 pagesNIDECroyert8No ratings yet
- Best Presentation On VFDDocument68 pagesBest Presentation On VFDWaseem Hashmat89% (9)
- Generator protection COMBIFLEX overviewDocument20 pagesGenerator protection COMBIFLEX overviewHai LeNo ratings yet
- Variable Frequency DriveDocument8 pagesVariable Frequency DriveNAYEEM100% (1)
- Relay Coordination StudiesDocument23 pagesRelay Coordination StudiesRonaldNo ratings yet
- Part Xi. Protective Device CoordinationDocument99 pagesPart Xi. Protective Device CoordinationMichael Calizo PacisNo ratings yet
- Motor VFDDocument3 pagesMotor VFDjowdiverNo ratings yet
- Type 2 Co-Ordination Selection ChartsDocument20 pagesType 2 Co-Ordination Selection ChartsDheeraj YadavNo ratings yet
- Generator ProtectionDocument10 pagesGenerator ProtectionVirendra SinghNo ratings yet
- Microcontroller Motor Protection Relay SettingsDocument9 pagesMicrocontroller Motor Protection Relay SettingsAyush KumarNo ratings yet
- AC Drive Cable Selection: Requirements, Reasons, and InsightsDocument8 pagesAC Drive Cable Selection: Requirements, Reasons, and Insightszaheeruddin_mohdNo ratings yet
- Field-Oriented Control by Currents in A Voltage Fed Forced Motor Inverter DriveDocument8 pagesField-Oriented Control by Currents in A Voltage Fed Forced Motor Inverter DriveXuejun ZhuNo ratings yet
- VFDsDocument20 pagesVFDsHaris ShahidNo ratings yet
- Installation and Maintenance Manual Type SSM Medium Voltage 200 - 7,500 HPDocument120 pagesInstallation and Maintenance Manual Type SSM Medium Voltage 200 - 7,500 HPHans MortenNo ratings yet
- When To Us A Line or Load ReactorDocument3 pagesWhen To Us A Line or Load ReactorJaggu JrzNo ratings yet
- PWM Fan ControllerDocument5 pagesPWM Fan ControlleranandNo ratings yet
- AVR Features AGN023 - B PDFDocument6 pagesAVR Features AGN023 - B PDFAnonymous BBX2E87aHNo ratings yet
- Fundamentals of DSP-Based Control For AC Machines: by Finbarr Moynihan, Embedded Control Systems GroupDocument4 pagesFundamentals of DSP-Based Control For AC Machines: by Finbarr Moynihan, Embedded Control Systems Groupveer110No ratings yet
- Line Reactors Can Protect Motors and Reduce Power Line Distortion From VfdsDocument2 pagesLine Reactors Can Protect Motors and Reduce Power Line Distortion From VfdspanchalabNo ratings yet
- Component and Types of VFDDocument11 pagesComponent and Types of VFDArsalan Danish100% (1)
- Alternator Protection For Emergency StandbyEngine GeneratorsDocument30 pagesAlternator Protection For Emergency StandbyEngine GeneratorsAdrian BrokmanNo ratings yet
- Power System Protection - Part 10Document22 pagesPower System Protection - Part 10Matthew WongNo ratings yet
- Accessories For Frequency Inverter 1dd65Document7 pagesAccessories For Frequency Inverter 1dd65appinassociatesNo ratings yet
- 3 PCIM-2021 Modular Multilevel Converter For Variable Speed Operation of Pumped Storage Hydropower PlantsDocument8 pages3 PCIM-2021 Modular Multilevel Converter For Variable Speed Operation of Pumped Storage Hydropower Plantsraghbendrat3884No ratings yet
- Technical Seminar On VFDDocument17 pagesTechnical Seminar On VFDRadhika Priyadarshini100% (7)
- Motor Controls: Anibal T. de AlmeidaDocument42 pagesMotor Controls: Anibal T. de Almeidaabdallah hosinNo ratings yet
- Technical Selection Guide for Cummins Generator AVRsDocument4 pagesTechnical Selection Guide for Cummins Generator AVRsmohsen_cumminsNo ratings yet
- AC Generator and Motor ProtectionDocument76 pagesAC Generator and Motor ProtectionAtif Husayn100% (1)
- Electrical FundamentalsDocument217 pagesElectrical FundamentalsVijayakumar ChNo ratings yet
- Variable Frequency DriveDocument36 pagesVariable Frequency DriveAaron Palomino Ramirez100% (2)
- VSD Advantages, Disadvantages, Selection Criteria and Installation TipsDocument9 pagesVSD Advantages, Disadvantages, Selection Criteria and Installation Tipsrbabar2000142No ratings yet
- PWM vs PFM Operation of DC/DC Converters for Portable AppsDocument10 pagesPWM vs PFM Operation of DC/DC Converters for Portable Appsyzhao148No ratings yet
- Generator Protection SystemDocument31 pagesGenerator Protection Systemmuaz_aminu1422100% (1)
- Fuji Frenic Mega GuideDocument673 pagesFuji Frenic Mega GuideSantiago RoseroNo ratings yet
- Motor ProtectionDocument29 pagesMotor ProtectionSridhar N Nagarjan100% (4)
- DOE - Motor - and - Drive - Assessment - Leads - To - Energy - Savings - For - Power - Drive - SystemsDocument8 pagesDOE - Motor - and - Drive - Assessment - Leads - To - Energy - Savings - For - Power - Drive - SystemsFernandoCrespoMonNo ratings yet
- Iec 60243-1-2013Document58 pagesIec 60243-1-2013FernandoCrespoMon100% (1)
- Digital Transformation of Protection and ControlDocument2 pagesDigital Transformation of Protection and ControlFernandoCrespoMonNo ratings yet
- Operator's Manual: Nirvana Cycling Refrigerated DryerDocument50 pagesOperator's Manual: Nirvana Cycling Refrigerated DryerFernandoCrespoMonNo ratings yet
- Ice 2005Document62 pagesIce 2005FernandoCrespoMonNo ratings yet
- Taking Medium-Voltage Motor Control Centers To New Levels of SafetyDocument10 pagesTaking Medium-Voltage Motor Control Centers To New Levels of SafetyFernandoCrespoMonNo ratings yet
- Selection of Heat Treatment Conditions and Prevention of Secondary Microbial Contamination of Liquid Sugar: Practical RemarksDocument5 pagesSelection of Heat Treatment Conditions and Prevention of Secondary Microbial Contamination of Liquid Sugar: Practical RemarksFernandoCrespoMonNo ratings yet
- Led Strip Light ManualDocument10 pagesLed Strip Light ManualFernandoCrespoMonNo ratings yet
- Spear - Long Range 1080p 2MP 60 FPS License Plate Recognition (LPR) CameraDocument4 pagesSpear - Long Range 1080p 2MP 60 FPS License Plate Recognition (LPR) CameraFernandoCrespoMonNo ratings yet
- Datasheet MultiPlus Inverter Charger 800VA 5kVA enDocument2 pagesDatasheet MultiPlus Inverter Charger 800VA 5kVA enGbolahan OjuolapeNo ratings yet
- Control LED lights with your phone or remoteDocument2 pagesControl LED lights with your phone or remoteFernandoCrespoMonNo ratings yet
- DM 6XXX Register MapDocument5 pagesDM 6XXX Register MapFernandoCrespoMonNo ratings yet
- Human Errors and Electrical SafetyDocument1 pageHuman Errors and Electrical SafetyFernandoCrespoMonNo ratings yet
- Good - Preparation - Electrical - SafetyDocument1 pageGood - Preparation - Electrical - SafetyFernandoCrespoMonNo ratings yet
- License Plate Capture Camera 20190110Document7 pagesLicense Plate Capture Camera 20190110FernandoCrespoMonNo ratings yet
- How To Weigh - CAT ScaleDocument4 pagesHow To Weigh - CAT ScaleFernandoCrespoMonNo ratings yet
- SRP 2305 12 24 30CV InstructionDocument2 pagesSRP 2305 12 24 30CV InstructionFernandoCrespoMonNo ratings yet
- D3 D4 Unidades Evaporadoras DanfossDocument36 pagesD3 D4 Unidades Evaporadoras DanfossFernandoCrespoMonNo ratings yet
- Optyma Condensing Units: Lightweight and Compact SolutionDocument32 pagesOptyma Condensing Units: Lightweight and Compact SolutionviniciusschwabNo ratings yet
- SR 2303b User ManualDocument1 pageSR 2303b User ManualFernandoCrespoMonNo ratings yet
- D5-2 Prepainted Galvanized Galvalume Steel Coils With Protective Plastic FilmDocument2 pagesD5-2 Prepainted Galvanized Galvalume Steel Coils With Protective Plastic FilmFernandoCrespoMonNo ratings yet
- NEMA MG1 Motors and GeneratorsDocument709 pagesNEMA MG1 Motors and Generatorslam266100% (1)
- Adaptive Algorithm: HandlingDocument54 pagesAdaptive Algorithm: HandlingFernandoCrespoMonNo ratings yet
- Setting Up Meross Smart Wifi Adapter For Regular Garage Door Opener Unit (Adds Voice and Smartphone Control)Document22 pagesSetting Up Meross Smart Wifi Adapter For Regular Garage Door Opener Unit (Adds Voice and Smartphone Control)FernandoCrespoMonNo ratings yet
- EasyLogic PM1000 Series - METSEDM6200Document3 pagesEasyLogic PM1000 Series - METSEDM6200FernandoCrespoMonNo ratings yet
- Modicon TSX Nano PLC: The Big Solution in A Small PackageDocument11 pagesModicon TSX Nano PLC: The Big Solution in A Small PackageFernandoCrespoMonNo ratings yet
- Algorithm To Calculate Western - Catholic Easter Date. (#1180480) - DrupalDocument2 pagesAlgorithm To Calculate Western - Catholic Easter Date. (#1180480) - DrupalFernandoCrespoMonNo ratings yet
- Nano PLCS: Selection GuideDocument34 pagesNano PLCS: Selection GuideFernandoCrespoMonNo ratings yet
- Simplifying Motor Coordination StudiesDocument15 pagesSimplifying Motor Coordination StudiesFernandoCrespoMonNo ratings yet
- Erasmus Rotterdam University MCDocument24 pagesErasmus Rotterdam University MCAndreea CroitoruNo ratings yet
- Experiment# 3 Projectile Motion (Tasks 3 and 4)Document18 pagesExperiment# 3 Projectile Motion (Tasks 3 and 4)Hafiz MuhammadNo ratings yet
- Engineering StudiesDocument4 pagesEngineering StudiesSamuel PhegelloNo ratings yet
- EniSpA - The Corporate Strategy of An International Energy Major PDFDocument24 pagesEniSpA - The Corporate Strategy of An International Energy Major PDFAnonymous 9ZMbuR75% (4)
- The Image of The CityDocument17 pagesThe Image of The CityMay Rose ParagasNo ratings yet
- Wily Walnut BRAIN SQUEEZERS Vol.1Document116 pagesWily Walnut BRAIN SQUEEZERS Vol.1tarzaman88% (8)
- 30-300 MHZ Transmission Line Trainer Tla05Document1 page30-300 MHZ Transmission Line Trainer Tla05Kishor HandoreNo ratings yet
- Lista Arancelaria EUADocument547 pagesLista Arancelaria EUAvilisbeth18No ratings yet
- Proximity Sensing and Warning Technology For Heavy Construction Equipment OperationDocument10 pagesProximity Sensing and Warning Technology For Heavy Construction Equipment OperationAnand ReddyNo ratings yet
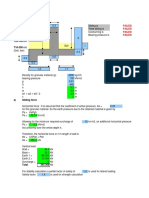
- Sliding, Overturning, Bearing Pressure and Bending Reinforcement Calculations for Retaining WallDocument4 pagesSliding, Overturning, Bearing Pressure and Bending Reinforcement Calculations for Retaining WallAbdul Aziz Julkarnain ZulkifliNo ratings yet
- MX 201110 enDocument1,203 pagesMX 201110 envajrahastaNo ratings yet
- Genética, Modificaciones y MutacionesDocument12 pagesGenética, Modificaciones y MutacionespokemaniacoplancheNo ratings yet
- Cse Reviewer - MathDocument58 pagesCse Reviewer - MathLyne LerinNo ratings yet
- Tables and Bar ChartsDocument7 pagesTables and Bar ChartsVictoria FedoseevaNo ratings yet
- Rules For The CertificationDocument84 pagesRules For The CertificationhdelriovNo ratings yet
- Full Report-Disinfectant and SanitizerDocument19 pagesFull Report-Disinfectant and Sanitizermohd addinNo ratings yet
- GLOBAL GAME AFK IN THE ZOMBIE APOCALYPSE GAME Chapter 201-250Document201 pagesGLOBAL GAME AFK IN THE ZOMBIE APOCALYPSE GAME Chapter 201-250ganesh sarikondaNo ratings yet
- Chemistry of Food Changes During Storage: Group 7Document22 pagesChemistry of Food Changes During Storage: Group 7Sonny MichaelNo ratings yet
- Philips HF C-Arm BrochureDocument2 pagesPhilips HF C-Arm Brochuregarysov50% (2)
- Detecting Oil Spills from Remote SensorsDocument7 pagesDetecting Oil Spills from Remote SensorsFikri Adji Wiranto100% (1)
- 2GIG KEY2 345 Install GuideDocument2 pages2GIG KEY2 345 Install GuideAlarm Grid Home Security and Alarm MonitoringNo ratings yet
- Violet Flame Clearing of The Heart ServiceDocument16 pagesViolet Flame Clearing of The Heart ServiceMySecret Gardenmdp82% (11)
- Computer Engineering SyllabusDocument47 pagesComputer Engineering SyllabusLily ChanNo ratings yet
- The Picture of Dorian GrayDocument137 pagesThe Picture of Dorian GrayАнгелаС.No ratings yet
- Plasma ChemistryDocument6 pagesPlasma ChemistryArief RomadhonNo ratings yet
- RCS England Trainees Guide To A Quality Improvement Project 2021Document17 pagesRCS England Trainees Guide To A Quality Improvement Project 2021Wee K WeiNo ratings yet
- Stereochemistry MSCDocument29 pagesStereochemistry MSCBapu Thorat50% (2)
- Foreign Body Airway ObstructionDocument6 pagesForeign Body Airway ObstructionReeja RajeshNo ratings yet
- Oxford Reading Tree: The Pet ShopDocument12 pagesOxford Reading Tree: The Pet ShopKanjaNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyFrom EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNo ratings yet
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Implementing an Integrated Management System (IMS): The strategic approachFrom EverandImplementing an Integrated Management System (IMS): The strategic approachRating: 5 out of 5 stars5/5 (2)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Asset Integrity Management for Offshore and Onshore StructuresFrom EverandAsset Integrity Management for Offshore and Onshore StructuresNo ratings yet
- Well Control for Completions and InterventionsFrom EverandWell Control for Completions and InterventionsRating: 4 out of 5 stars4/5 (10)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)
- Industrial Piping and Equipment Estimating ManualFrom EverandIndustrial Piping and Equipment Estimating ManualRating: 5 out of 5 stars5/5 (7)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Biogas Production: Pretreatment Methods in Anaerobic DigestionFrom EverandBiogas Production: Pretreatment Methods in Anaerobic DigestionNo ratings yet
- DIY Free Home Energy Solutions: How to Design and Build Your own Domestic Free Energy SolutionFrom EverandDIY Free Home Energy Solutions: How to Design and Build Your own Domestic Free Energy SolutionRating: 5 out of 5 stars5/5 (1)
- Machine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesFrom EverandMachine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesPatrick BangertRating: 3 out of 5 stars3/5 (2)
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksFrom EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksNo ratings yet
- Solar Electricity Basics: Powering Your Home or Office with Solar EnergyFrom EverandSolar Electricity Basics: Powering Your Home or Office with Solar EnergyRating: 5 out of 5 stars5/5 (3)
- Air-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AFrom EverandAir-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&ARating: 5 out of 5 stars5/5 (1)