You might also like
- Tektronix 475 Service ManualDocument222 pagesTektronix 475 Service Manualkenkostan100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Control StrategyDocument44 pagesControl StrategyAyunie FazlinNo ratings yet
- Cascade ControlDocument10 pagesCascade ControlManoj RajagopalanNo ratings yet
- Process Control Fundamentals - ADDDocument115 pagesProcess Control Fundamentals - ADDAsifNo ratings yet
- Lecture 27 Model Steam Turbine Gov SystemDocument60 pagesLecture 27 Model Steam Turbine Gov Systempk cfctkNo ratings yet
- Feedforward On Temperature Control Systems.Document3 pagesFeedforward On Temperature Control Systems.Hayden Lovett100% (2)
- Co Ordinated Master Control (CMC) : by V.HariayyappanDocument25 pagesCo Ordinated Master Control (CMC) : by V.HariayyappanRavi Satyapal100% (2)
- TM According To 60354 - GBDocument8 pagesTM According To 60354 - GBbpchimeraNo ratings yet
- A319 - A321 - LAA - and - LUS - A321NX - (Trouble Shooting Manual)Document21 pagesA319 - A321 - LAA - and - LUS - A321NX - (Trouble Shooting Manual)A WongNo ratings yet
- A Brief Idea About Automatic Process Control: Controlling What?Document33 pagesA Brief Idea About Automatic Process Control: Controlling What?Shiva Kotamraju100% (1)
- Steam Turbine Governing Systems OverviewDocument11 pagesSteam Turbine Governing Systems Overviewdrmsrmurty80% (5)
- Automatic Controls for Heating and Air Conditioning: Principles and ApplicationsFrom EverandAutomatic Controls for Heating and Air Conditioning: Principles and ApplicationsRating: 4 out of 5 stars4/5 (2)
- HaierDocument12 pagesHaierMarketing Ecosains HayatiNo ratings yet
- 5g SahilDocument12 pages5g SahilSahil GuptaNo ratings yet
- Lab Report PDC Gas PressureDocument9 pagesLab Report PDC Gas PressureHaziq Azli100% (1)
- CH 05 (Process Controllers)Document35 pagesCH 05 (Process Controllers)32anikkumarpaulNo ratings yet
- Temperature Control: On-Off ControllerDocument9 pagesTemperature Control: On-Off Controllerdivyansh kashyapNo ratings yet
- Control EngineeringDocument23 pagesControl EngineeringNor AshimyNo ratings yet
- 10 11648 J Acis 20140201 11 PDFDocument5 pages10 11648 J Acis 20140201 11 PDFwsa wsaNo ratings yet
- Siemens Feedforward ControlDocument12 pagesSiemens Feedforward ControlmineralmadnessNo ratings yet
- CS LabReport 8Document10 pagesCS LabReport 8Muhammad AfzaalNo ratings yet
- Traditional Advanced Control StrategiesDocument48 pagesTraditional Advanced Control Strategiescape iipeNo ratings yet
- Configuracion SelectorDocument5 pagesConfiguracion SelectorpatricioNo ratings yet
- Switch Rotatorio LW32Document5 pagesSwitch Rotatorio LW32symantec37No ratings yet
- Feedforward in Dryer FoodDocument4 pagesFeedforward in Dryer FoodJosé DavidNo ratings yet
- Controller Principles 2020 NotesDocument17 pagesController Principles 2020 NotesJoseph ChalilNo ratings yet
- Control SystemDocument12 pagesControl SystemMedha ArunNo ratings yet
- 3 Advanced ControlDocument10 pages3 Advanced ControlCupa no DensetsuNo ratings yet
- Governing Systems MSRMDocument10 pagesGoverning Systems MSRMBIRANCHINo ratings yet
- Process Systems Analysis and Control D Coughanowr 3rd Ed 2Document6 pagesProcess Systems Analysis and Control D Coughanowr 3rd Ed 2bismilishfaqNo ratings yet
- Combustion Control by Pulse Firing: SP-456 February, 2007Document8 pagesCombustion Control by Pulse Firing: SP-456 February, 2007Thaiminh VoNo ratings yet
- Chapter Two: Controller PrinciplesDocument34 pagesChapter Two: Controller PrinciplesBekaluNo ratings yet
- 5 TempLpDocument8 pages5 TempLpGonzalo Ccamaque ArotaipeNo ratings yet
- PID Temperature Controller: RS Stock NoDocument25 pagesPID Temperature Controller: RS Stock NoryhseduyadNo ratings yet
- Temperature Controller BasicDocument33 pagesTemperature Controller BasicGovindaraju MariyappanNo ratings yet
- Influence of Transformer Tap-Changer Control Mode Upon HVDC Valve Power LossDocument4 pagesInfluence of Transformer Tap-Changer Control Mode Upon HVDC Valve Power LossChristos ApostolopoulosNo ratings yet
- Control of Continuous Process: Lecturer: Dr. Shallon StubbsDocument32 pagesControl of Continuous Process: Lecturer: Dr. Shallon StubbsLuther King Ferguson100% (1)
- Week 10-Feedback ControlDocument34 pagesWeek 10-Feedback ControlMohd Aizad100% (1)
- Control DynamicDocument10 pagesControl Dynamicكرار نعيم100% (1)
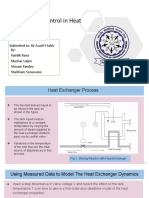
- Temperature Control in Heat ExchangerDocument26 pagesTemperature Control in Heat ExchangerGokul SinghNo ratings yet
- 5 TempLpDocument8 pages5 TempLpGonzalo Ccamaque ArotaipeNo ratings yet
- lab report جابرDocument12 pageslab report جابرhadel.adel.abedNo ratings yet
- Pengendalian LevelDocument13 pagesPengendalian LevelFarhan Nyoenk ExtreamNo ratings yet
- Full Download Designing Controls For The Process Industries 1st Seames Solution Manual PDF Full ChapterDocument36 pagesFull Download Designing Controls For The Process Industries 1st Seames Solution Manual PDF Full Chapterhennerygoldintn670100% (17)
- PID ControllerDocument4 pagesPID Controlleralokranjan1811412No ratings yet
- Control, Why and HowDocument11 pagesControl, Why and Howramanjorewal786No ratings yet
- IPCDocument15 pagesIPCu can't see meNo ratings yet
- Drum Level & AttemperationDocument13 pagesDrum Level & AttemperationSagar LuthraNo ratings yet
- W7ADocument15 pagesW7AShujah RashidNo ratings yet
- 1815 12 PDFDocument21 pages1815 12 PDFUmar IftikharNo ratings yet
- Exp - P6 - Temperature ControlDocument10 pagesExp - P6 - Temperature ControlSiddesh PatilNo ratings yet
- Designing Controls For The Process Industries 1st Seames Solution ManualDocument36 pagesDesigning Controls For The Process Industries 1st Seames Solution Manualunlimberwisdomhn3scy100% (34)
- Automatización 4ta Clase, Tipos de Opciones de ControlDocument6 pagesAutomatización 4ta Clase, Tipos de Opciones de Controlivandario17-1No ratings yet
- Estructura de Control Ejemplo (Eng)Document14 pagesEstructura de Control Ejemplo (Eng)Silvia QuentaNo ratings yet
- G 30-70 Ver NRDocument20 pagesG 30-70 Ver NRSatyam PandeyNo ratings yet
- PRCCHA2 Sick Test1 2022 MemoDocument9 pagesPRCCHA2 Sick Test1 2022 Memopulezanele11No ratings yet
- Input Components: Systems OperationDocument4 pagesInput Components: Systems OperationDANIEL VARGAS RODRIGUEZNo ratings yet
- CP041Fen Bypass DampfkesselDocument12 pagesCP041Fen Bypass DampfkesselJoelCristobalNo ratings yet
- ERT 321 - Process Control & Dynamics Feedforward & Ratio ControlDocument23 pagesERT 321 - Process Control & Dynamics Feedforward & Ratio Controlhakita86No ratings yet
- Pages From 432912277-Manual-Air-Compresor-Atlas Copco-GA75-2-13Document4 pagesPages From 432912277-Manual-Air-Compresor-Atlas Copco-GA75-2-13Tolias EgwNo ratings yet
- Implementation of Fuzzy Temperature Control Using MicroprocessorDocument6 pagesImplementation of Fuzzy Temperature Control Using Microprocessorankith j raiNo ratings yet
- NotesDocument31 pagesNotesPankaj Kumar ChauhanNo ratings yet
- Mechatronics 1Document12 pagesMechatronics 1Pankaj Kumar ChauhanNo ratings yet
- Mechatronics 2Document8 pagesMechatronics 2Pankaj Kumar ChauhanNo ratings yet
- OpampDocument5 pagesOpampPankaj Kumar ChauhanNo ratings yet
- Control Components in Hydraulic System: Valves"Document15 pagesControl Components in Hydraulic System: Valves"Pankaj Kumar ChauhanNo ratings yet
- MIMO Stadium Antenna: Electrical SpecificationsDocument3 pagesMIMO Stadium Antenna: Electrical SpecificationsСергей МирошниченкоNo ratings yet
- L197 Wide Flat Panel MonitorDocument1 pageL197 Wide Flat Panel Monitorraudhah artNo ratings yet
- IEEE 802.X Standards: Topology, Electrical Topology and Access Schemes ofDocument19 pagesIEEE 802.X Standards: Topology, Electrical Topology and Access Schemes ofSyed M. YaseenNo ratings yet
- 08 GT I9300 Tshoo 7Document94 pages08 GT I9300 Tshoo 7Javier GomezNo ratings yet
- Part I: Multiple Choice Questions (18 Marks)Document14 pagesPart I: Multiple Choice Questions (18 Marks)Noor ThamerNo ratings yet
- Hitachi ManualDocument144 pagesHitachi ManualJuan Erasmo ValenzuelaNo ratings yet
- 11 - 030215-030191 - 40 - 128 - 4+0 - UBT - Link1 - 2 - 3 - 4 (Upg Conf & Ant) - Rev01Document8 pages11 - 030215-030191 - 40 - 128 - 4+0 - UBT - Link1 - 2 - 3 - 4 (Upg Conf & Ant) - Rev01citius yogaNo ratings yet
- Lab 8.4.2 Configuring Access Policies and DMZ SettingsDocument9 pagesLab 8.4.2 Configuring Access Policies and DMZ Settingsonlycisco.tkNo ratings yet
- DVB-S2 Modem: Sk-Ip / SK-DV / Sk-TsDocument6 pagesDVB-S2 Modem: Sk-Ip / SK-DV / Sk-TsNacer ItourarNo ratings yet
- Draft 1 Check List For StakeholdersDocument7 pagesDraft 1 Check List For StakeholdersGirmaye Haile GebremikaelNo ratings yet
- BeeWi BBH210 ManualDocument76 pagesBeeWi BBH210 ManualmigrosoftNo ratings yet
- Datasheet RouterDocument2 pagesDatasheet RouterJosé L. PizarroNo ratings yet
- FastataDocument26 pagesFastataAbderrahmane BenkaddourNo ratings yet
- Network Security: Presented By: Dr. Munam Ali ShahDocument31 pagesNetwork Security: Presented By: Dr. Munam Ali ShahNadeem ShoukatNo ratings yet
- (Applications of Communications Theory) J. Gordon Pearce (Auth.) - Telecommunications Switching-Springer US (1981)Document343 pages(Applications of Communications Theory) J. Gordon Pearce (Auth.) - Telecommunications Switching-Springer US (1981)agam nizardwi100% (1)
- FX1S FX2N FX1NDocument82 pagesFX1S FX2N FX1Ngalih kalokaNo ratings yet
- ABC of Cisco Prime - Basic Overview For BeginnerDocument47 pagesABC of Cisco Prime - Basic Overview For BeginnerMary Joe-RobertNo ratings yet
- Trends in Satellite Communication & It'S Relevance To Information TechnologyDocument36 pagesTrends in Satellite Communication & It'S Relevance To Information TechnologyDr. Surendra Pal100% (1)
- Sonix SNC7001A - Spec - V1.5Document22 pagesSonix SNC7001A - Spec - V1.5Imraan RamdjanNo ratings yet
- Brochure Led P8 OutdoorDocument1 pageBrochure Led P8 OutdoorAndri KurniawanNo ratings yet
- Micom P547 Phase Comparison ProtectionDocument2 pagesMicom P547 Phase Comparison Protectiondave chaudhuryNo ratings yet
- Edc Bit Paper - II EceDocument2 pagesEdc Bit Paper - II Ecevenkiscribd444No ratings yet
- A Review Advancement of Security Alarm System Using Internet of Things (Iot)Document13 pagesA Review Advancement of Security Alarm System Using Internet of Things (Iot)AppyNo ratings yet
- GK615 & GK616: Portable VHF StationsDocument2 pagesGK615 & GK616: Portable VHF StationsIvo SilvaNo ratings yet
- Best Book For Preparation of GATE ECE BranchDocument23 pagesBest Book For Preparation of GATE ECE BranchanandsahuNo ratings yet
- Combicom: GB INSTRUCTION MANUAL USB Serial ConverterDocument12 pagesCombicom: GB INSTRUCTION MANUAL USB Serial ConverterFet hiNo ratings yet
- MikroTik Security Guide v2Document121 pagesMikroTik Security Guide v2Mihály KóborNo ratings yet