You might also like
- Predictive Tools For AccuracyDocument19 pagesPredictive Tools For AccuracyVinod Kumar Choudhry93% (15)
- Proto Saharan Precursor of Ancient CivilizationsDocument175 pagesProto Saharan Precursor of Ancient CivilizationsClyde Winters100% (4)
- Fire Art Case StudyDocument15 pagesFire Art Case StudyKimberlyHerring100% (1)
- Honsanalworkshop9sol CMPLT PDFDocument5 pagesHonsanalworkshop9sol CMPLT PDFSomeoneNo ratings yet
- Counselling Goes To The Movies: Antwone Fisher (2002)Document12 pagesCounselling Goes To The Movies: Antwone Fisher (2002)Azizul MohamadNo ratings yet
- Large Span Structure: MMBC-VDocument20 pagesLarge Span Structure: MMBC-VASHFAQNo ratings yet
- Abnormal PsychologyDocument13 pagesAbnormal PsychologyBai B. UsmanNo ratings yet
- KKT ScribedDocument7 pagesKKT ScribedRupaj NayakNo ratings yet
- Differential Equations Notes: Author Vincent HuangDocument16 pagesDifferential Equations Notes: Author Vincent HuangVincent HuangNo ratings yet
- 1 Theory of Convex FunctionsDocument14 pages1 Theory of Convex FunctionsLuis Carlos RojanoNo ratings yet
- Lecture12 Multiple Random Variables and IndependenceDocument6 pagesLecture12 Multiple Random Variables and Independencesourav kumar rayNo ratings yet
- 7-Convex OptimizationDocument34 pages7-Convex OptimizationTuấn ĐỗNo ratings yet
- Diffeq 1Document74 pagesDiffeq 1José UrrietaNo ratings yet
- Solutions Sheet 2, Continuity.: Questions 7-12Document4 pagesSolutions Sheet 2, Continuity.: Questions 7-12Ranu GamesNo ratings yet
- Practice Midterm SolutionsDocument5 pagesPractice Midterm Solutions3dd2ef652ed6f7No ratings yet
- Quadratic Vector Equations: (X) Is Operator Concave Instead of ConvexDocument15 pagesQuadratic Vector Equations: (X) Is Operator Concave Instead of Convexnguyenthuongz1610No ratings yet
- Notes On The Lebesgue Integral: Revised, 9/5/2021Document10 pagesNotes On The Lebesgue Integral: Revised, 9/5/2021MRNo ratings yet
- Math 319 Notes, A.SDocument13 pagesMath 319 Notes, A.SNahitMacitGuntepeNo ratings yet
- Stat 212 April 10 NotesDocument3 pagesStat 212 April 10 NotesAlan ChungNo ratings yet
- A e ConvergenceDocument6 pagesA e ConvergenceDharmendra KumarNo ratings yet
- HW5 SolsDocument5 pagesHW5 SolsDon NguyenNo ratings yet
- 1 Heat Equation On The Infinite Domain: Weston Barger July 27, 2016Document9 pages1 Heat Equation On The Infinite Domain: Weston Barger July 27, 2016ranvNo ratings yet
- Opuscula Math 3205 PDFDocument8 pagesOpuscula Math 3205 PDFAntonio Torres PeñaNo ratings yet
- Ode SlidesDocument24 pagesOde Slidesranya.baevaNo ratings yet
- Diagonal Dominance and Harmless Off-Diagonal DelaysDocument8 pagesDiagonal Dominance and Harmless Off-Diagonal DelaysMark Edward GonzalesNo ratings yet
- Euler Factsheet1Document10 pagesEuler Factsheet1Into The UniverseNo ratings yet
- Implicit Function TheoremDocument4 pagesImplicit Function Theoremserialz dramazNo ratings yet
- Characterization of LipschitzDocument8 pagesCharacterization of LipschitzSufyanNo ratings yet
- Lecture 05 - 2Document8 pagesLecture 05 - 2khani gNo ratings yet
- PS: Advanced Probability Theory Sheet 1: SolutionsDocument3 pagesPS: Advanced Probability Theory Sheet 1: SolutionsRobinson Ortega MezaNo ratings yet
- An Application of The Calculus of Variations To Sturm Liouville TheoryDocument13 pagesAn Application of The Calculus of Variations To Sturm Liouville TheorybobmezzNo ratings yet
- First OrderDocument113 pagesFirst Orderaadelaide083No ratings yet
- TMA4225 Foundations of Analysis 2011 Littlewood's Three Principles 2Document2 pagesTMA4225 Foundations of Analysis 2011 Littlewood's Three Principles 2EDU CIPANANo ratings yet
- Differential Equations: Introduction and PreliminariesDocument4 pagesDifferential Equations: Introduction and PreliminariesIsrahmi oktaviaNo ratings yet
- A Trilinear Maximal Function Estimate Via Arithmetic CombinatoricsDocument12 pagesA Trilinear Maximal Function Estimate Via Arithmetic CombinatoricsKariem Mohamed Ragab HamedNo ratings yet
- KorovkinDocument10 pagesKorovkinMurali KNo ratings yet
- Dynamics4 Cons LyapunovDocument15 pagesDynamics4 Cons LyapunovDipankar PokhrelNo ratings yet
- Lesson1 4 PDFDocument9 pagesLesson1 4 PDFHugo NavaNo ratings yet
- Solving Dual Problems: 1 M T 1 1 T R RDocument14 pagesSolving Dual Problems: 1 M T 1 1 T R RSamuel Alfonzo Gil BarcoNo ratings yet
- Differentiaon TaylorDocument14 pagesDifferentiaon Taylordhruv mahashayNo ratings yet
- K TtheoryDocument7 pagesK TtheoryMarcelo AlonsoNo ratings yet
- z18 Parametric ProblemsDocument4 pagesz18 Parametric ProblemsDong LiuNo ratings yet
- Set Valued Fractional Order DiffereDocument11 pagesSet Valued Fractional Order Differehovu.hutechNo ratings yet
- Lec3 Convex Function ExerciseDocument4 pagesLec3 Convex Function Exercisezxm1485No ratings yet
- 1 Review of Key Concepts From Previous Lectures: Lecture Notes - Amber Habib - December 1Document4 pages1 Review of Key Concepts From Previous Lectures: Lecture Notes - Amber Habib - December 1Christopher BellNo ratings yet
- MA108-Lecture 4-D3Document18 pagesMA108-Lecture 4-D3Aditya DwivediNo ratings yet
- DirichletDocument6 pagesDirichletYenny PurwandariNo ratings yet
- Stability and Convergence of The Wavelet-Galerkin ...Document19 pagesStability and Convergence of The Wavelet-Galerkin ...Luu KhoaNo ratings yet
- MA108-Lecture 5-D3Document12 pagesMA108-Lecture 5-D3Aditya DwivediNo ratings yet
- Normed Spaces Equivalent To Inner Product Spaces and Stability of Functional EquationsDocument11 pagesNormed Spaces Equivalent To Inner Product Spaces and Stability of Functional EquationsJamilu Adamu MusaNo ratings yet
- Week 3Document20 pagesWeek 3Venkat KarthikeyaNo ratings yet
- Transformations of Random Variables - Examples: Example 1: Square of NormalDocument3 pagesTransformations of Random Variables - Examples: Example 1: Square of Normal700spymaster007No ratings yet
- Epsilon-Delta Proofs and Uniform Continuity: Universidade Estadual de Maring A, BrasilDocument10 pagesEpsilon-Delta Proofs and Uniform Continuity: Universidade Estadual de Maring A, BrasilÉlyes AbidNo ratings yet
- Differential EquationsDocument31 pagesDifferential EquationsMansi NanavatiNo ratings yet
- Homework 6: AMATH 353 Partial Differential Equations and Waves Weston Barger Summer 2016Document2 pagesHomework 6: AMATH 353 Partial Differential Equations and Waves Weston Barger Summer 2016ranvNo ratings yet
- Uniform Continuity: Ryan Acosta BabbDocument4 pagesUniform Continuity: Ryan Acosta Babbarvind lakshmi ranjanNo ratings yet
- Homework 3: X Z Y W X×Y X YDocument2 pagesHomework 3: X Z Y W X×Y X YLuis EduardoNo ratings yet
- Lecture 15Document6 pagesLecture 15The tricksterNo ratings yet
- Week1 Diffusion SolutionsDocument10 pagesWeek1 Diffusion SolutionszeliawillscumbergNo ratings yet
- IntegrationDocument9 pagesIntegrationMRNo ratings yet
- Chapters 1-2 Lecture NotesDocument62 pagesChapters 1-2 Lecture NotespastelgorengNo ratings yet
- An Introduction To Lagrangian and Hamiltonian Mechanics: Lecture NotesDocument59 pagesAn Introduction To Lagrangian and Hamiltonian Mechanics: Lecture Notesadam_87jktNo ratings yet
- (Ozgur) - Lecture 5 (2.6)Document7 pages(Ozgur) - Lecture 5 (2.6)Orkun AkyolNo ratings yet
- British Citizenship Exam Review TestDocument25 pagesBritish Citizenship Exam Review TestMay J. PabloNo ratings yet
- Work Immersion Experience at Formaply Inustry in Brgy. de Ocampo, Trece Martires City, CaviteDocument34 pagesWork Immersion Experience at Formaply Inustry in Brgy. de Ocampo, Trece Martires City, CaviteKen AshleyNo ratings yet
- Final Presentation BANK OF BARODA 1Document8 pagesFinal Presentation BANK OF BARODA 1Pooja GoyalNo ratings yet
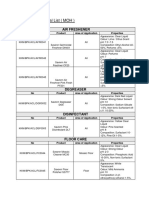
- Approved Chemical ListDocument2 pagesApproved Chemical ListSyed Mansur Alyahya100% (1)
- Brochure - Digital Banking - New DelhiDocument4 pagesBrochure - Digital Banking - New Delhiankitgarg13No ratings yet
- La Navassa Property, Sovereignty, and The Law of TerritoriesDocument52 pagesLa Navassa Property, Sovereignty, and The Law of TerritoriesEve AthanasekouNo ratings yet
- SATURDAY - FIRST - PDF (1)Document3 pagesSATURDAY - FIRST - PDF (1)Manuel Perez GastelumNo ratings yet
- The Changeling by Thomas MiddletonDocument47 pagesThe Changeling by Thomas MiddletonPaulinaOdeth RothNo ratings yet
- Information Theory Entropy Relative EntropyDocument60 pagesInformation Theory Entropy Relative EntropyJamesNo ratings yet
- CIP Program Report 1992Document180 pagesCIP Program Report 1992cip-libraryNo ratings yet
- Advanced Technical Analysis: - Online Live Interactive SessionDocument4 pagesAdvanced Technical Analysis: - Online Live Interactive SessionmahendarNo ratings yet
- Java ReviewDocument68 pagesJava ReviewMyco BelvestreNo ratings yet
- ''Want To Learn To Speak Latin or Greek This (2018) Summer''Document10 pages''Want To Learn To Speak Latin or Greek This (2018) Summer''ThriwNo ratings yet
- Peri Operative Nursing ManagementDocument19 pagesPeri Operative Nursing ManagementSabina KontehNo ratings yet
- Strategic ManagementDocument14 pagesStrategic ManagementvishakhaNo ratings yet
- The New Definition and Classification of Seizures and EpilepsyDocument16 pagesThe New Definition and Classification of Seizures and EpilepsynadiafyNo ratings yet
- Dispersion Compensation FibreDocument16 pagesDispersion Compensation FibreGyana Ranjan MatiNo ratings yet
- GRADE 1 To 12 Daily Lesson LOG: TLE6AG-Oc-3-1.3.3Document7 pagesGRADE 1 To 12 Daily Lesson LOG: TLE6AG-Oc-3-1.3.3Roxanne Pia FlorentinoNo ratings yet
- Klabin Reports 2nd Quarter Earnings of R$ 15 Million: HighlightsDocument10 pagesKlabin Reports 2nd Quarter Earnings of R$ 15 Million: HighlightsKlabin_RINo ratings yet
- Thesis FulltextDocument281 pagesThesis FulltextEvgenia MakantasiNo ratings yet
- Awareness and Usage of Internet Banking Facilities in Sri LankaDocument18 pagesAwareness and Usage of Internet Banking Facilities in Sri LankaTharindu Thathsarana RajapakshaNo ratings yet
- Acts 1 Bible StudyDocument4 pagesActs 1 Bible StudyPastor Jeanne100% (1)
- Unified Power Quality Conditioner (Upqc) With Pi and Hysteresis Controller For Power Quality Improvement in Distribution SystemsDocument7 pagesUnified Power Quality Conditioner (Upqc) With Pi and Hysteresis Controller For Power Quality Improvement in Distribution SystemsKANNAN MANINo ratings yet
- Endzone Trappers Lesson PlanDocument2 pagesEndzone Trappers Lesson Planapi-484665679No ratings yet