You might also like
- HP PageWide Color A3 - CPMDDocument567 pagesHP PageWide Color A3 - CPMDDaniel Garcia50% (2)
- 1000 Resep Chinese Food - Mary WinataDocument586 pages1000 Resep Chinese Food - Mary Winatap17421183048 ANA MAWARNI MUSTIKAWATI100% (3)
- Interfacing PIC Microcontrollers: Embedded Design by Interactive SimulationFrom EverandInterfacing PIC Microcontrollers: Embedded Design by Interactive SimulationNo ratings yet
- Types and Uses of Electrical Tools and EquipmentsDocument5 pagesTypes and Uses of Electrical Tools and EquipmentsYhan Brotamonte BoneoNo ratings yet
- Ac Motor Controller: B60Z (B230) B80Z (B233) B60Z (A262) B80Z (A257)Document116 pagesAc Motor Controller: B60Z (B230) B80Z (B233) B60Z (A262) B80Z (A257)Christian Bedoya100% (3)
- Chapter 3 Regression Analysis Section 3.2 Simple Regression With Data Analysis Example 3.2 Honda Civic (II)Document4 pagesChapter 3 Regression Analysis Section 3.2 Simple Regression With Data Analysis Example 3.2 Honda Civic (II)Harsey Joy Punzalan100% (1)
- Exploring Modeling With Data and Differential Equations Using R - Zobitz UserDocument379 pagesExploring Modeling With Data and Differential Equations Using R - Zobitz UserJuan RodriguezNo ratings yet
- Script MikrotikDocument38 pagesScript Mikrotiktakashimura creativeNo ratings yet
- Sahil CVDocument2 pagesSahil CVTimothy King LincolnNo ratings yet
- SMSMDocument3 pagesSMSMMahmoud ElwishyNo ratings yet
- Ism BrochureDocument20 pagesIsm Brochureabag0910No ratings yet
- CV Lahiru MadushankaDocument3 pagesCV Lahiru MadushankaKalpana NilupuleeNo ratings yet
- Gamal Ahmed CVDocument2 pagesGamal Ahmed CVMohAmed ReFatNo ratings yet
- Ihtisham ResumeDocument1 pageIhtisham ResumeihtishamaliexpressNo ratings yet
- CEV Aantarak: Quarantine HelpfulDocument13 pagesCEV Aantarak: Quarantine HelpfulKhushbu SavaliyaNo ratings yet
- All ProjectDocument15 pagesAll ProjectmohamedmahmoudamitNo ratings yet
- ProfileDocument2 pagesProfilea.osama.tronixNo ratings yet
- Mohammed Hazem Ali Badwe: 0102 659 6777 - Tala, Minufia, EgyptDocument2 pagesMohammed Hazem Ali Badwe: 0102 659 6777 - Tala, Minufia, EgyptMohamedHazemNo ratings yet
- PHAM VAN MANH TopCV - VN 060324.163047Document2 pagesPHAM VAN MANH TopCV - VN 060324.163047leminhtuongkhanhNo ratings yet
- Arif Ihtisham CVDocument2 pagesArif Ihtisham CVIHTISHAM ARIFNo ratings yet
- Undergraduate Senior Computer and Communication Student: EducationDocument1 pageUndergraduate Senior Computer and Communication Student: EducationTaha AhmedNo ratings yet
- 3rd IEEE ICAC3N-21 Call For Paper - 1Document1 page3rd IEEE ICAC3N-21 Call For Paper - 1Devansh RathoreNo ratings yet
- Prototype Wireless Controller System Based On Raspberry Pi and Arduino For Engraving MachineDocument7 pagesPrototype Wireless Controller System Based On Raspberry Pi and Arduino For Engraving MachineChahiMouhcineNo ratings yet
- Amit Kumar Nandi: EngineerDocument2 pagesAmit Kumar Nandi: EngineerAmit NandiNo ratings yet
- MechatronicsDocument44 pagesMechatronicsTboiNo ratings yet
- Kashyap Rahul Anil Kumar EsdDocument4 pagesKashyap Rahul Anil Kumar Esdapi-239621055No ratings yet
- Puter Science EnggDocument40 pagesPuter Science EnggRïshí RìshìkêshNo ratings yet
- Ece ProjectsDocument15 pagesEce ProjectsNaveenkumar MNo ratings yet
- About Me:: ExperiencesDocument2 pagesAbout Me:: ExperiencesNick MoussNo ratings yet
- Project BankDocument62 pagesProject BankInfinI GahaNo ratings yet
- ResumeDocument2 pagesResumeAhmed AbdelradyNo ratings yet
- Advance in MechatronicsDocument6 pagesAdvance in Mechatronicsj rNo ratings yet
- Mechanical Projects Related To Automobile Archives - Free Projects For AllDocument12 pagesMechanical Projects Related To Automobile Archives - Free Projects For AlltyagiNo ratings yet
- CV - en - Elfarah OthmaneDocument2 pagesCV - en - Elfarah OthmaneOthmane ElfarahNo ratings yet
- Computer Engineering Computer Technology in All Areas of IndustryDocument3 pagesComputer Engineering Computer Technology in All Areas of IndustryResearch ParkNo ratings yet
- Handheld Device ProjectsDocument9 pagesHandheld Device ProjectsSim OnNo ratings yet
- Taher Gamal CV-Embedded-Modified Version2Document2 pagesTaher Gamal CV-Embedded-Modified Version2Taher GaMalNo ratings yet
- Assigment 4Document7 pagesAssigment 4ahmedmaky50No ratings yet
- Presented By: - : Piyush UpadhyayDocument24 pagesPresented By: - : Piyush UpadhyaymalhiavtarsinghNo ratings yet
- Es R19Document41 pagesEs R19Sundar ShodavaramNo ratings yet
- IV Ansar OrgDocument50 pagesIV Ansar OrgAbhin AsNo ratings yet
- Mechatronics: Master of Engineering inDocument1 pageMechatronics: Master of Engineering inThora Ghabra LainNo ratings yet
- Advanced Technology Lab: Laboratory ManualDocument53 pagesAdvanced Technology Lab: Laboratory ManualsivajiNo ratings yet
- Laith SakkourDocument1 pageLaith SakkourAbdallah SayeghNo ratings yet
- Certificate: CMR Institute of TechnologyDocument57 pagesCertificate: CMR Institute of TechnologyAVINASHNo ratings yet
- HuynhDuyTrong CVDocument4 pagesHuynhDuyTrong CVTrong HuynhNo ratings yet
- CS8382 Digital Sys Lab Student ManualDocument87 pagesCS8382 Digital Sys Lab Student Manualgukan gukanNo ratings yet
- ZZZZ 42Document1 pageZZZZ 42Ghazi abdallahNo ratings yet
- 7.ECE V - VI Sem - 2018 - Syllabus1Document144 pages7.ECE V - VI Sem - 2018 - Syllabus1Major LoonyNo ratings yet
- Stream Name: Mechanical Engineering Semester 1 Semester 2 Semester 3 Semester 4Document7 pagesStream Name: Mechanical Engineering Semester 1 Semester 2 Semester 3 Semester 4Aakash RaiNo ratings yet
- Courses: Web DevelopmentDocument1 pageCourses: Web DevelopmentMohamed AymanNo ratings yet
- Muhammad's Resume.Document1 pageMuhammad's Resume.Osama MalikNo ratings yet
- Career in Mechatronics: Job HighlightsDocument1 pageCareer in Mechatronics: Job HighlightsRamBabuMeenaNo ratings yet
- Edwinxp - An Integrated Eda Software PackageDocument7 pagesEdwinxp - An Integrated Eda Software PackageRahul SharmaNo ratings yet
- Embedded Projects: IEEE 2012-13Document26 pagesEmbedded Projects: IEEE 2012-13Vicky LeakersNo ratings yet
- Resume Moh LotfyDocument3 pagesResume Moh LotfyMohamed LotfiNo ratings yet
- M E F A: Ohamed Ssayed Arag HmedDocument2 pagesM E F A: Ohamed Ssayed Arag HmedMohamed FaragNo ratings yet
- Artificial Intellogence (Robotics) PDFDocument22 pagesArtificial Intellogence (Robotics) PDFAiman SheikhNo ratings yet
- Carrera de Ingeniería Electrónica Sistemas Digitales: Course OverviewDocument24 pagesCarrera de Ingeniería Electrónica Sistemas Digitales: Course OverviewJuan HerreraNo ratings yet
- Arpit Dhiman 2.0Document2 pagesArpit Dhiman 2.0Abhishek SharmaNo ratings yet
- Final Year Projects List - PLC and SCADADocument4 pagesFinal Year Projects List - PLC and SCADAEnsemble Technologies83% (6)
- 2098 PC and Microcontrollers Applications in The Laboratory Exercises of The Electrical Engineering v1Document6 pages2098 PC and Microcontrollers Applications in The Laboratory Exercises of The Electrical Engineering v1prapya pokharelNo ratings yet
- Aadithya RESUMEDocument2 pagesAadithya RESUMEHariharan NatarajanNo ratings yet
- Computer Engineering: Computer Engineering Electronic Devices For Ubiquitous Computing OptionDocument2 pagesComputer Engineering: Computer Engineering Electronic Devices For Ubiquitous Computing OptionAbiy BerheNo ratings yet
- Curriculum Vitae: Abdullah Ahmed ShawkyDocument5 pagesCurriculum Vitae: Abdullah Ahmed ShawkyKhaledAhmedNo ratings yet
- Curriculum Vitae: Personal InformationDocument8 pagesCurriculum Vitae: Personal InformationBilal Nuraldin EltayebNo ratings yet
- Ai Based Rush Collision Prevention in Railways Abstract:: Keywords: Arduino, RFID Reader, GSM, Railway TrackDocument6 pagesAi Based Rush Collision Prevention in Railways Abstract:: Keywords: Arduino, RFID Reader, GSM, Railway Track18E3457 MukundiniNo ratings yet
- Lifting Plan FormatDocument2 pagesLifting Plan FormatmdmuzafferazamNo ratings yet
- Eton Raptor Owners ManualDocument42 pagesEton Raptor Owners Manual21st-Century-Goods.comNo ratings yet
- Nist CSWP 27Document10 pagesNist CSWP 27Ferry AstikaNo ratings yet
- Carbon Capture Project ANNUAL REPORT 2017Document21 pagesCarbon Capture Project ANNUAL REPORT 2017Liang Yann YUANNo ratings yet
- Update IP Particulars Through IP Portal ESICDocument55 pagesUpdate IP Particulars Through IP Portal ESICamittradaNo ratings yet
- Zechariah's Visions A Theological PerspectiveDocument13 pagesZechariah's Visions A Theological PerspectiveMayconNo ratings yet
- C++ Circular Queue Data StructureDocument8 pagesC++ Circular Queue Data StructureIshaan kataraNo ratings yet
- Parallelism (2) & Heterogeneous Computing & Future PerspetivesDocument50 pagesParallelism (2) & Heterogeneous Computing & Future Perspetivesacer smithNo ratings yet
- PHYSICS Investigatory Project-2Document12 pagesPHYSICS Investigatory Project-2arjunyas701No ratings yet
- Duracell DRPP300 / Husky 300 Power PackDocument1 pageDuracell DRPP300 / Husky 300 Power PackAKsentinelNo ratings yet
- Lec08 - State Transformation and RealizationsDocument55 pagesLec08 - State Transformation and RealizationsRehman SaleemNo ratings yet
- Quarter 4 Problem Set Combined and AvogadroDocument3 pagesQuarter 4 Problem Set Combined and AvogadroAnthony IlustreNo ratings yet
- Kenwood TK-D240 D340Document2 pagesKenwood TK-D240 D340Dyego FelixNo ratings yet
- Hdpe Polyethylene Pipes Pe100 Black For Water Updated Price List PDFDocument1 pageHdpe Polyethylene Pipes Pe100 Black For Water Updated Price List PDFworld of fun world of funNo ratings yet
- Railwire Billing MarchDocument1 pageRailwire Billing March18212 NEELESH CHANDRANo ratings yet
- Department of Electrical Engineering Analog and Digital CommunicationDocument4 pagesDepartment of Electrical Engineering Analog and Digital CommunicationAleena KanwalNo ratings yet
- New Product DevelopmentDocument7 pagesNew Product Developmentfew.fearlessNo ratings yet
- Propeller Display AbstractDocument2 pagesPropeller Display AbstractmanishkumarNo ratings yet
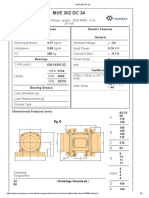
- MVE 202 DC 24: Drawings DownloadDocument2 pagesMVE 202 DC 24: Drawings DownloadAmol SarinNo ratings yet
- DDM - Daikin AHUDocument27 pagesDDM - Daikin AHUSam Wang Chern Peng100% (1)
- A Glimpse Into The Future of Cinema - The Ultimate Guide To A.I. Art For Film AnimationDocument14 pagesA Glimpse Into The Future of Cinema - The Ultimate Guide To A.I. Art For Film AnimationhardNo ratings yet
- Forcepoint Web Security Admin CourseDocument200 pagesForcepoint Web Security Admin CourseAlok KumarNo ratings yet
- Kuppelwieser - 2020Document10 pagesKuppelwieser - 2020ginta_rock9No ratings yet