Volume 7, Issue 12, December – 2022 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Convolutional Neural Network for Road Network
Detections Using Sentinel 2A
Bayu Yanuargi Ema Utami Kusnawi
Master of Informatics Engineering Master of Informatics Engineering Master of Informatics Engineering
AMIKOM Yogyakarta University AMIKOM Yogyakarta University AMIKOM Yogyakarta University
Yogyakarta, Indonesia Yogyakarta, Indonesia Yogyakarta, Indonesia
Abstract:- Road network data is critical information that Therefore, poor connectivity and erroneous recognition may
used by government for development planning and by the be problems with extracted [7].
services provider such as transportation and logistic
company to deliver their services and prices calculations. This research will use Sentinel 2A satellite imagery and
Use of sentinel 2A satellite imagery data will solve the GPS data to train the model using U-Net algorithm. The goal
road map update cost issue since this data is free to use. of this research is how the GPS data can be a good or proper
The only problem on sentinel 2A is only about the medial training data for the road data extraction from medium
spatial resolution that only able to detect 10 meters object. resolution of Satellite Imagery. We expecting that the
Using GPS data for the ground truth data will help to extraction from Sentinel 2A will be optimized, since Sentinel
create the road masking data that can be used for the 2A is the free sources product that can be used by another
training. The result of the combination between these two researcher with a low budget.
data on Convolutional Neural Network are satisfied
enough with accuracies score is 99% and soft dice error Convolutional Neural Network (CNN) model has been
only 0.5%. performed well on the high resolutions satellite imagery with
missing error only 5.12% with redundancy of error is only
Keywords:- Convolutional Neural Network (CNN), Sentinel, 0.35% and the accuracies is 93.61% [10]. This research will
GPS, U-Net, Deep Learning. try to extract the road network data using CNN algorithm to
know how accurate is the algorithm to extract the road
I. INTRODUCTION network data from the medium resolution satellite imagery
and how it can be used to gather the new road that haven’t
Accurate and up to date road network data is very critical available in the current RBI versions.
to ensure the development of road infrastructure, urban
planning, navigation/routing planning and other purposes of II. LITERATURE REVIEW
use are exactly precise. In order the road network data can
keep up to date, the updating should be conducted frequently, Road network data may be extracted from high
especially in the big city such as Jakarta. resolution remotely sensed data because of recent
developments in machine vision, which also make it possible
There are two methods can be used for the road network to automate the mapping process. By using feature mapping
update, first is traditional survey by visiting directly to the approaches, the hybrid configurations on a dataset combining
field and second using remote sensing approach. Traditional ground-truth road masks and aerial information from typical
surveying methods are laborious and time consuming, that’s regions of Spanish territory obtained maximum IoU and F1
why the considerable development of remote sensing scores of 0.5790 and 0.7120, respectively, and a minimum loss
technology in recent year has opened the way to automatic of 0.4985. When compared to the original design created from
road detection application supporting a wide coverage area scratch, the best hybrid model (using SEResNeXt50 as the
[5]. backbone network and U-Net as the segmentation
architecture) saw performance metrics improve by around
Remote sensing using deep learning technology and 3.5% [2].
high-resolution remote sensing images provided opportunity
to help the user for the road network updating. The In another study using data from Google Earth at a
applications of geo-information updating, urban resolution of 60 cm/pixel and road network graphs from the
transportation planning, and autonomous vehicle operation all Open Street Map (OSM) covering the core of 37 cities in six
heavily rely on the extraction of roads from high-resolution different countries. The road tracing model used in this study
satellite photos, a fundamental study in earth observation and is similar to the Road Tracer for building accurate road maps
remote sensing. Furthermore, precise road maps can help with from satellite imagery. The iterative search algorithm used is
scene comprehension by supplying background information CNN to get a road network map. The study compared Road
for recognizing structures, crops, and many other surface Tracer and Road Tracer-M with an increase of 10.4% in F1
features. Road extraction remains a difficult task despite scores and 8.7% in IoU,relative increase in F1 38.6% and IoU
decades of attention due to complex ground information, 51.1% [7].
including the shadows cast by buildings, the shade of trees,
moving vehicles, and structures that resemble roads.
IJISRT22DEC213 www.ijisrt.com 463
Volume 7, Issue 12, December – 2022 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
CNN technology, one of the most effective deep learning
techniques in recent years, excels at picture segmentation and
image recognition. It is also frequently used to extract roads
from satellite data and, in general, produces reliable findings.
However, at the moment, the extraction of roads based on
CNN still necessitates a lot of manual preparation work. To
achieve extraction, a significant number of samples can be
marked, necessitating a lengthy drawing cycle and a high
production cost. The GPS trajectories of a floating car are used
as a training set (GPSTasST) in a new method for creating
CNN sample sets that extracts multilayer urban highways
from high resolution remote sensing data. This method
rasterizes the GPS trajectories of floating car into a raster map
and uses the processed raster map to label the satellite image
to obtain a road extraction sample set. CNN can extract roads
from remote sensing imagery by learning the training set. The
results show that the method achieves a harmonic mean of
precision and recall higher than road extraction method from Fig 1. Satellite Imagery Pre-Processing
single data source while eliminating the manual labelling
work, which shows the effectiveness of this work [4]. B. Convolutional Neural Network (CNN)
A deep learning algorithm called the convolutional
The use of the CNN algorithm for pothole detection neural network (CNN) is made to analyse two-dimensional
results in a fairly high accuracy, which is 92.8%. The CNN data. CNN is frequently used to analyse and find features in
algorithm is used to classify the images generated by the dash images. In contrast to the neural network's typical input of 1-
camera. The first stage is the classification of images using dimensional array data, the CNN technique uses 2-
feed forward. The second stage is the learning stage with the dimensional input data. Similar to generic neural networks,
back propagation method. Using the wrapping method and CNN is made up of a large number of neurons with weight,
cropping to concentrate on the classification object Using feed bias, and activation functions. Below Figure 2 is the steps of
forward and reverse propagation methods is the next step in CNN.
training. The feed forward method with updated weights and
biases is then used in the classification stage. The GPS will
determine the position coordinates if a hole is found and
communicate those coordinates to the database server [1].
III. METHOD
A. Data Pre-processing
The data used in this study is Sentinel 2 Satellite
Imagery data for the DKI Jakarta area and its surroundings.
Sentinel-2 is a satellite launched by a collaboration between
The European Commission and the European Space Agency Fig 2. Convolutional Neural Network Steps
in the Global Monitoring for Environment and Security
(GMES) program. This satellite was launched to monitor the Convolutional, In CNN, Convolutional is a linear
condition of the earth's surface, so that it is able to provide operation that involves multiplying a set of weights by the
information on the current condition of the earth from space input. The convolution layer works by sliding the window on
for environmental and security applications. the input image. Each shift will be carried out a 'dot' operation
between the input and the filter, resulting in a certain output
Sentinel-2 images can be obtained through the United value, as described in Figure 3 below.
States Geological Survey (USGS) Earth Explorer web
(http://earthexplorer.usgs.gov), Sentinels Scientific Data Hub
(https://scihub.copernicus.eu/), or the Earth Observing
System. (https://lv.eosda.com/). The important parameters
for this data is cloud cover should be less than 10% to ensure
all object can be detected properly.
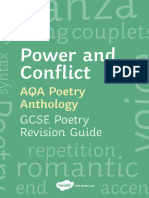
Based on the figure 1 below, the processing of the
satellite imagery post download are to use only the 10 meters
band and combine three band of 4,3,2 to make the
panchromatic image of red green blue. Since the original
coverages of the data is 110 x 100 km, we cropped the image Fig 3. Convolutional Concept
only on the research area with final size is 20 x 10 km.
IJISRT22DEC215 www.ijisrt.com 464
Volume 7, Issue 12, December – 2022 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Rectified Linear Unit (ReLu) is an operation to introduce C. Road Data
nonlinearity and improve the representation of the model. The This study used GPS data captured by the Ride-Hailing
ReLU activation function is f(x) = max( 0,x). The output value Driver (GRAB) app in April 2019. These included 84,000
of the neuron can be expressed as 0 if the input is negative. If paths with a total of 88 million PDs (point data). Data were
the input value is positive, then the output of the neuron is the taken every second he depending on the driver's performance
value of the activation input. [3]. Figure 5 below shows an example of GPS data in Jakarta
that used for this research.
Pooling or subsampling is a reduction in the size of the
matrix. There are two types of pooling that are often used,
namely average pooling and max pooling [8]. The purpose of
using the pooling layer is to speed up the computational
process. This can happen because after passing the pooling
layer, fewer parameters need to be updated, so the risk of
overfitting is minimal. Just like in the convolution layer, the
pooling layer also has a filter with a certain size that will
perform a sliding window process on the input matrix as on
below figure 4.
Fig 5. GPS data in the research area
This study used GPS data captured by the Ride-Hailing
Driver (GRAB) app in April 2019. These included 84,000
paths with a total of 88 million PDs (point data). Data were
Fig. 4. Max pooling and average pooling concept taken every second he depending on the driver's performance.
Figure 8 below shows an example of GPS data in Jakarta that
The flattening stage is changing from the matrix in the used for this research.
pooling layer to one column only (a single vector). Flatten
serves to reshape a feature map from a multidimensional array D. Data Training
into a vector [9]. This is necessary so that these values can be To maximize training speed and power, we decomposed
used as inputs to the fully connected layer. Dropout the Sentinel-2 mosaic and GPS grid into small chunks of data
Regularization is a neural network regularization technique by creating a 256 × 256 cell grid within the training area.
where some neurons will be randomly selected and not used Using GPS data intersected with raster data, we created a
in the training process. By removing a neuron, it means reference road data set for training a U-Net Road recognition
removing it temporarily from the existing network. The model. The Sentinel-2 image was then cropped to the chosen
purpose of using this technique is to prevent overfitting. In grid (256 × 256 grid) resulting in 2240 samples. Finally, we
addition, this technique can also speed up the learning process stacked the Sentinel-2 RGB bands with the updated raster GPS
on the CNN architecture as a whole. and split the 2240 chip samples into training, validation, and
test datasets. Randomly split 80% of the chip samples for
The fully connected layer is a feed forward neural training and 20% evenly for validation and testing. 224 each.
network consisting of a hidden layer, activation function, The data training and model building can be seen on figure 6
output layer, and loss function. Fully connected layer is often and table 1
used in multi-layer perceptron’s with the aim of transforming
the data dimensions so that the data can be classified linearly.
The input to the fully connected layer is data from feature
learning. Data from the feature learning process which is the
input to this layer is data in vector form, which has previously
been processed by flatten.
Softmax rule in the classification process is to calculate
the probability of each target class against all existing target
classes. The output probability range on softmax is a value
from 0 to 1, and if all the probability values of the target class
are added up, then the value will be equal to one. Softmax uses
the exponential of a given input value and the sum of the
exponential values of all values in the output.
IJISRT22DEC215 www.ijisrt.com 465
Volume 7, Issue 12, December – 2022 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
E. U-Net For Road Detection
To ensure the model can detecting road object properly,
the U-Net architecture layers and hyperparameter modified.
First the input layer is using 256x256 data same with the
output data with a zero-padding border around the image.
Second is using Rectified Linear Unit Activation function
(ReLU) to solve the linear problem during the training by give
zero value if the input is less than zero. For the dropout layer
we add value of 0.3 to avoid overfitting on our training data.
In the end the dice loss function will replace the original loss
function to minimize impact of imbalanced classes for the
segmentation result. The process above can be seen on below
figure 7.
Fig 6. Data Training Flow
TABLE 1. TRAINING DATA.
Satellite Imagery GPS Label
Fig 7. U-Nets Architecture
The U-Net architecture is built on top of Fully
Convolutional Network (FCN) and modified in such a way as
to produce better segmentation. Compared to FCN, the two
main differences are (1) the U-NET is symmetrical and (2) the
jump connection between the down sampling path and the up-
sampling path applies the join operator instead of sum. This
skip connection aims to provide local information to global
information during up sampling. Because it is symmetrical,
the network has a large number of feature maps in the up-
sampling path, which makes it possible to transfer
information. In comparison, the basic FCN architecture has
only a limited number of class feature maps in its up-sampling
path [6].
IV. RESULT
Data training and validation using Google Colabs targeting to
train dataset, getting a model and validating the training result.
On the training process, we were used 50 epochs with the
result as below table.
*Sample of data training
IJISRT22DEC215 www.ijisrt.com 466
Volume 7, Issue 12, December – 2022 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
TABLE 2. TRAINING RESULT
Val Val
Epoch Accuracy Soft Dice Lost Loss Accuracy dice loss Val Loss
1 0.87805 0.27090 0.37232 0.88172 0.27360 0.36169
5 0.94258 0.10747 0.16497 0.89634 0.14253 0.29585
10 0.96868 0.05483 0.08334 0.89727 0.12303 0.32373
15 0.97880 0.03536 0.05481 0.89725 0.11394 0.36209
20 0.98411 0.02594 0.04084 0.89584 0.11274 0.41052
25 0.98787 0.01973 0.03151 0.89506 0.11106 0.45484
30 0.99150 0.01401 0.02272 0.89623 0.10846 0.49072
35 0.99404 0.01006 0.01631 0.89947 0.10375 0.57911
40 0.99538 0.00785 0.01294 0.89784 0.10495 0.68984
45 0.99629 0.00633 0.01050 0.89841 0.10374 0.82875
50 0.99719 0.00492 0.00815 0.89791 0.10411 0.72644
Based on training data with 50 epochs, can be seen that
the training and validation shown very good accuracies nearly
to 1. The training reaches the maximum numbers of 0.99 in
the epoch 50, and the validation reach the highest score on
epoch of 27 with 0.90 score. Based on Figure 7 and 8 below,
it shows that the graph of the U-Net model does not show
overfitting or underfitting conditions, but rather towards a
convergent graph. Underfitting is an event where the model
that has been formed is unable to see the logic behind the
dataset, so the model cannot make predictions with accurate
results on training data or data validation. Meanwhile,
Overfitting occurs when the model is too focused on a
particular training dataset, so it cannot make predictions
correctly when given another, similar dataset [6]. In this study
the number of epochs = 50, but due to limited equipment,
researchers implemented an early stop monitor. Early stop Fig 9. Soft Dice Loss Functions
monitor is a condition where the training phase is stopped
before the entire epoch is completed. The condition applied is,
if every 10 epochs there is a decrease in accuracy then the
training phase will be stopped. The accuracy, dice loss and
comparison between both can be seen on figure 8 – 10 below.
Fig 10. Accuracy vs Loss
Trained model applied to the datasets of Sentinel 2A.
The prediction took 55 second to generate 2240 images. The
model build based on the training on epoch 49 which have
lesser Soft Dice Error on the data training 0.005 with accuracy
of 0.997. The prediction using the best model produce quite
Fig 8. Training Accuracy Curve good result that shown on below picture where the predicted
mask able to detect the similar pattern as ground truth mask.
The missing road on predicted mask mostly are smaller road
class that not expected to be detected from sentinel 2A because
IJISRT22DEC215 www.ijisrt.com 467
Volume 7, Issue 12, December – 2022 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
of the limitation of spatial resolution of this data that only able using density, but optimized it by detecting the middle of road
to record 10 meters wide per pixel as we can see on below based on density and use that as the source of ground truth
figure 11. mask.
Input Image Ground Truth Predicted REFERENCES
Mask Mask
[1]. A. D. Wiratmoko et al., "Design of Potholes Detection
as Road’s Feasibility Data Information Using
Convolutional Neural Network(CNN)," 2019
International Symposium on Electronics and Smart
Devices (ISESD), 2019, pp. 1-5, doi:
10.1109/ISESD.2019.8909461.
[2]. C.-I. Cira, R. Alcarria, M.-Á. Manso-Callejo, and F.
Serradilla, “A Deep Learning-Based Solution for Large-
Scale Extraction of the Secondary Road Network from
High-Resolution Aerial Orthoimagery,” Applied
Sciences, vol. 10, no. 20, p. 7272, Oct. 2020, doi:
10.3390/app10207272.
[3]. Huang, X., Yin, Y., Lim, S., Wang, G., Hu, B.,
Varadarajan, J., Zheng, S., Bulusu, A., & Zimmermann,
R, “Grab-Posisi: An Extensive Real-Life GPS
Trajectory Dataset in Southeast Asia”, 2019.
Proceedings of the 3rd ACM SIGSPATIAL
International Workshop on Prediction of Human
Mobility.
[4]. J. Zhang, Q. Hu, J. Li and M. Ai, "Learning From GPS
Trajectories of Floating Car for CNN-Based Urban
Road Extraction With High-Resolution Satellite
Imagery," in IEEE Transactions on Geoscience and
Remote Sensing, vol. 59, no. 3, pp. 1836-1847, March
2021, doi: 10.1109/TGRS.2020.3003425.
[5]. Qianqian Zhang, Qingling Kong, Chao Zhang,
Shucheng You, Hai Wei, Ruizhi Sun & Li Li ,“A new
road extraction method using Sentinel-1 SAR images
based on the deep fully convolutional neural
network”,2019, European Journal of Remote Sensing,
52:1, 572-582, DOI: 10.1080/22797254.2019.1694447
[6]. Suta, Ida & Sudarma, Made & Kumara, I Nyoman
Satya. “Segmentasi Tumor Otak Berdasarkan Citra
Magnetic Resonance Imaging Dengan Menggunakan
Metode U-NET”, 2020. Majalah Ilmiah Teknologi
Fig 11. Comparison Between Sentinel 2A, Ground Truth Elektro. 19. 151. 10.24843/MITE.2020.v19i02.P05.
Mask and Predicted Mask [7]. Y. Wei, K. Zhang and S. Ji, "Road Network Extraction
from Satellite Images Using CNN Based Segmentation
V. CONCLUSION and Tracing," IGARSS 2019 - 2019 IEEE International
Geoscience and Remote Sensing Symposium, 2019, pp.
Based on the training and validation, the model built with 3923-3926, doi: 10.1109/IGARSS.2019.8898565.
very high accuracies of 0.997 nearly to 1 and less soft dice loss [8]. Bejiga, M.B., Zeggada, A., Nouffidj, A., & Melgani, F.
is only 0.005 nearly zero. With this model accuracies and loss, (2017). A Convolutional Neural Network Approach for
the expectation to extract road data from medium resolution Assisting Avalanche Search and Rescue Operations
satellite imagery can be gained. Beside that the GPS data also with UAV Imagery. Remote. Sens., 9, 100.
provide quite good ground truth mask for the data training [9]. A. Chakravarty and J. Sivaswamy, "RACE-Net: A
with low loss value and high quality of data training. Recurrent Neural Network for Biomedical Image
Segmentation," in IEEE Journal of Biomedical and
The combinations of GPS data and Sentinel 2A based on Health Informatics, vol. 23, no. 3, pp. 1151-1162, May
the prediction result is enough to get good quality road data 2019, doi: 10.1109/JBHI.2018.2852635.
with low cost. Comparing with high resolution imagery, [10]. Chen, Yuantao & Wang, Jin & Chen, Xi & Kumar, Arun
Sentinel 2A and GPS data is good enough to be used for the & Yang, Kai & Cao, Zhouhong. (2019). Image Super-
1:25.000 Road network map updating. For next development Resolution Algorithm Based on Dual-Channel
related with the combination between GPS data and medium Convolutional Neural Networks. Applied Sciences. 9.
resolution is how to optimizing the GPS not only analyzed 2316. 10.3390/app9112316.
IJISRT22DEC215 www.ijisrt.com 468
You might also like
- Direct Georeferencing 3D Points Cloud Map Based On SLAM and Robot Operating SystemDocument5 pagesDirect Georeferencing 3D Points Cloud Map Based On SLAM and Robot Operating SystemFraj HarizNo ratings yet
- VW 60330 2009 12 eDocument29 pagesVW 60330 2009 12 eAmir Borhanipour100% (1)
- The Eminence in Shadow, Vol. 4Document255 pagesThe Eminence in Shadow, Vol. 4Ezra Salvame83% (6)
- Remote Sensing: Deep TEC: Deep Transfer Learning With Ensemble Classifier For Road Extraction From UAV ImageryDocument19 pagesRemote Sensing: Deep TEC: Deep Transfer Learning With Ensemble Classifier For Road Extraction From UAV ImageryDaniel Garcia MurilloNo ratings yet
- 003 Hybrid Deep Learning-Gaussian Process Network For Pedestrian Lane Detection in Unstructured ScenesDocument15 pages003 Hybrid Deep Learning-Gaussian Process Network For Pedestrian Lane Detection in Unstructured ScenesPratik TakudageNo ratings yet
- Image Classification - Road Infrastructure Maintenance - Dela Cruz & ManaliliDocument24 pagesImage Classification - Road Infrastructure Maintenance - Dela Cruz & ManaliliAngelyn Briones Dela CruzNo ratings yet
- Road Extraction Image ProcessingDocument5 pagesRoad Extraction Image ProcessingJunaid AkramNo ratings yet
- Redesigning U-Net With Dense Connection and Attention Module For Satellite Based Cloud DetectionDocument10 pagesRedesigning U-Net With Dense Connection and Attention Module For Satellite Based Cloud DetectionIAES IJAINo ratings yet
- Lane Detection Algorithm Based On Temporal-SpatialDocument27 pagesLane Detection Algorithm Based On Temporal-SpatialSabari Selvam BNo ratings yet
- UAV Target Detection Algorithm Based On Improved YOLOv8Document11 pagesUAV Target Detection Algorithm Based On Improved YOLOv8essamabdelhamiedNo ratings yet
- Leveraging Mobile Net and Yolo Algorithm For Enhanced Perception in Autonomous DrivingDocument5 pagesLeveraging Mobile Net and Yolo Algorithm For Enhanced Perception in Autonomous DrivingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Vision-Based Method For Improving The Safety of Self-DrivingDocument5 pagesA Vision-Based Method For Improving The Safety of Self-DrivingtilahunNo ratings yet
- Sensors: Semantic Segmentation With Transfer Learning For Off-Road Autonomous DrivingDocument21 pagesSensors: Semantic Segmentation With Transfer Learning For Off-Road Autonomous DrivingHedieh MadahNo ratings yet
- Road Crack Detection Using Deep Neural Network BasDocument11 pagesRoad Crack Detection Using Deep Neural Network BasHarsha SNo ratings yet
- Applied Sciences: Lightweight Attention Pyramid Network For Object Detection and Instance SegmentationDocument16 pagesApplied Sciences: Lightweight Attention Pyramid Network For Object Detection and Instance SegmentationSudhit SethiNo ratings yet
- Ruas 2017Document256 pagesRuas 2017tek bahadur katuwalNo ratings yet
- (IJETA-V10I1P1) :M.Thachayani, G.RubavaniDocument3 pages(IJETA-V10I1P1) :M.Thachayani, G.RubavaniIJETA - EighthSenseGroupNo ratings yet
- Research On Land Cover Classification of Multi Source Remote Sensing Data Based On Improved U Net NetworkDocument16 pagesResearch On Land Cover Classification of Multi Source Remote Sensing Data Based On Improved U Net Networktuanminh140309No ratings yet
- Automatic Urban Road Extraction From High Resolution Satellite Data Using Object Based Image Analysis A Fuzzy ClassificaDocument8 pagesAutomatic Urban Road Extraction From High Resolution Satellite Data Using Object Based Image Analysis A Fuzzy Classificahenri joel jrNo ratings yet
- EDGE-Net: Efficient Deep-Learning Gradients Extraction NetworkDocument15 pagesEDGE-Net: Efficient Deep-Learning Gradients Extraction NetworkAdam HansenNo ratings yet
- A - GNN - Architecture - With - Local - and - Global-Attention - Feature - For - Image - Classification 2Document13 pagesA - GNN - Architecture - With - Local - and - Global-Attention - Feature - For - Image - Classification 2Mustafa Mohammadi GharasuieNo ratings yet
- Remote Sensing: Jointnet: A Common Neural Network For Road and Building ExtractionDocument22 pagesRemote Sensing: Jointnet: A Common Neural Network For Road and Building ExtractionDaniel Garcia MurilloNo ratings yet
- 1 s2.0 S0167739X22003028 MainDocument9 pages1 s2.0 S0167739X22003028 MainErsela ZainNo ratings yet
- Road Extraction From High Resolution Remote Sensing Image Based On Mathematics Morphology and Seed GrowthDocument6 pagesRoad Extraction From High Resolution Remote Sensing Image Based On Mathematics Morphology and Seed GrowthWilliam PENGNo ratings yet
- Traffic Congestion Detection Using Deep LearningDocument3 pagesTraffic Congestion Detection Using Deep LearningEditor IJTSRDNo ratings yet
- Review of Advanced Image Processing Techniques Digital Elevation ModelDocument7 pagesReview of Advanced Image Processing Techniques Digital Elevation ModelIJRASETPublicationsNo ratings yet
- People Counting in Crowd Faster R-CNNDocument9 pagesPeople Counting in Crowd Faster R-CNNIJRASETPublicationsNo ratings yet
- Electronics: A New Dataset and Performance Evaluation of A Region-Based CNN For Urban Object DetectionDocument19 pagesElectronics: A New Dataset and Performance Evaluation of A Region-Based CNN For Urban Object DetectionTest EmailNo ratings yet
- Real-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationDocument6 pagesReal-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationJUAN CAMILO TORRES MUNOZNo ratings yet
- Accepted Manuscript: NeurocomputingDocument33 pagesAccepted Manuscript: Neurocomputingalex vargheseNo ratings yet
- Revista de SensoresDocument13 pagesRevista de SensoresIts JhoreyNo ratings yet
- Visual Cross-Image Fusion Using Deep Neural Networks For Image Edge DetectionDocument12 pagesVisual Cross-Image Fusion Using Deep Neural Networks For Image Edge DetectionWilluNo ratings yet
- Sustainability 11 04511 v2Document19 pagesSustainability 11 04511 v2ravichoprascribdNo ratings yet
- Satellite Image Inpainting With Deep Generative Adversarial Neural NetworksDocument10 pagesSatellite Image Inpainting With Deep Generative Adversarial Neural NetworksIAES IJAINo ratings yet
- A Hybrid CNN-LSTM Architecture For Path Planning of Mobile Robots in Unknow EnvironmentsDocument5 pagesA Hybrid CNN-LSTM Architecture For Path Planning of Mobile Robots in Unknow EnvironmentsVarun AgarwalNo ratings yet
- Classification of MNIST Image Dataset Using Improved Convolutional Neural NetworkDocument10 pagesClassification of MNIST Image Dataset Using Improved Convolutional Neural NetworkIJRASETPublicationsNo ratings yet
- Research Article: Concrete Cracks Detection Using Convolutional Neural Network Based On Transfer LearningDocument10 pagesResearch Article: Concrete Cracks Detection Using Convolutional Neural Network Based On Transfer LearningVihangaNo ratings yet
- IEEE PROJECTS 2011-12: DSP Proje CtsDocument17 pagesIEEE PROJECTS 2011-12: DSP Proje CtsVatsalya HaveliyaNo ratings yet
- CR-YOLOv8 Multiscale Object Detection in Traffic Sign ImagesDocument10 pagesCR-YOLOv8 Multiscale Object Detection in Traffic Sign ImagesThe RoobanNo ratings yet
- Learning To Detect Roads in High-Resolution Aerial ImagesDocument14 pagesLearning To Detect Roads in High-Resolution Aerial ImagesAlim SheikhNo ratings yet
- Remote Sensing: Overview of The Special Issue On Applications of Remote Sensing Imagery For Urban AreasDocument4 pagesRemote Sensing: Overview of The Special Issue On Applications of Remote Sensing Imagery For Urban AreasAkshayNo ratings yet
- Real-Time Traffic Scene Segmentation Based On Multi-Feature Map and Deep LearningDocument6 pagesReal-Time Traffic Scene Segmentation Based On Multi-Feature Map and Deep LearningcarloscarlimNo ratings yet
- Object Detection Technique Using A Fast R-CNN Based TechniqueDocument9 pagesObject Detection Technique Using A Fast R-CNN Based TechniqueIJRASETPublicationsNo ratings yet
- Remote Sensing: Classification and Segmentation of Satellite Orthoimagery Using Convolutional Neural NetworksDocument21 pagesRemote Sensing: Classification and Segmentation of Satellite Orthoimagery Using Convolutional Neural NetworksPaulo AzevedoNo ratings yet
- 2018-TRR-Congestion ImpDocument16 pages2018-TRR-Congestion ImpBashuNo ratings yet
- Image-Based Indoor Localization Using Smartphone CameraDocument9 pagesImage-Based Indoor Localization Using Smartphone Cameratoufikenfissi1999No ratings yet
- 5435-Article Text-8660-1-10-20200511Document8 pages5435-Article Text-8660-1-10-20200511Dipan MehtaNo ratings yet
- LIDAR Camera Fusion For Road Detection Using Fully - 2019 - Robotics and AutonoDocument7 pagesLIDAR Camera Fusion For Road Detection Using Fully - 2019 - Robotics and Autonolihef14829No ratings yet
- A Deep Learning Based Stereo Matching Model For Autonomous VehicleDocument9 pagesA Deep Learning Based Stereo Matching Model For Autonomous VehicleIAES IJAINo ratings yet
- Los Días y Las HorasDocument8 pagesLos Días y Las HorasJuan Fernandez IriarteNo ratings yet
- Convolutional Neural Network For Satellite Image ClassificationDocument14 pagesConvolutional Neural Network For Satellite Image Classificationwilliam100% (1)
- SC-YOLO A Object Detection Model For Small Traffic SignsDocument11 pagesSC-YOLO A Object Detection Model For Small Traffic SignsthewildmusicworldNo ratings yet
- Traffic Density ControllerDocument4 pagesTraffic Density ControllerAAKASH KHANTWALNo ratings yet
- Applied Sciences: Path Loss Prediction Based On Machine Learning: Principle, Method, and Data ExpansionDocument18 pagesApplied Sciences: Path Loss Prediction Based On Machine Learning: Principle, Method, and Data ExpansionAurongo NasirNo ratings yet
- Research of Lane Detection Method Based On Attention MechanismDocument7 pagesResearch of Lane Detection Method Based On Attention MechanismkandarpNo ratings yet
- ECRU: An Encoder-Decoder Based Convolution Neural Network (CNN) For Road-Scene UnderstandingDocument19 pagesECRU: An Encoder-Decoder Based Convolution Neural Network (CNN) For Road-Scene UnderstandingJavi ColorsNo ratings yet
- Traffic Sign Recognition System Using CNNDocument7 pagesTraffic Sign Recognition System Using CNNInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Case Study On PNG UNITECH CampusDocument8 pagesA Case Study On PNG UNITECH CampusRakeshconclaveNo ratings yet
- Symmetry 12 01056 With CoverDocument16 pagesSymmetry 12 01056 With Coversiandowse03No ratings yet
- An Analysis of Various Deep Learning Algorithms For Image ProcessingDocument6 pagesAn Analysis of Various Deep Learning Algorithms For Image ProcessingVIVA-TECH IJRINo ratings yet
- Research On Road Extraction From High-Resolution Remote Sensing Images Based On Improved UNetDocument10 pagesResearch On Road Extraction From High-Resolution Remote Sensing Images Based On Improved UNetBharath RNo ratings yet
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Cyber Security Awareness and Educational Outcomes of Grade 4 LearnersDocument33 pagesCyber Security Awareness and Educational Outcomes of Grade 4 LearnersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Factors Influencing The Use of Improved Maize Seed and Participation in The Seed Demonstration Program by Smallholder Farmers in Kwali Area Council Abuja, NigeriaDocument6 pagesFactors Influencing The Use of Improved Maize Seed and Participation in The Seed Demonstration Program by Smallholder Farmers in Kwali Area Council Abuja, NigeriaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Parastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueDocument2 pagesParastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Health Care SystemDocument8 pagesSmart Health Care SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Blockchain Based Decentralized ApplicationDocument7 pagesBlockchain Based Decentralized ApplicationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Unmasking Phishing Threats Through Cutting-Edge Machine LearningDocument8 pagesUnmasking Phishing Threats Through Cutting-Edge Machine LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Study Assessing Viability of Installing 20kw Solar Power For The Electrical & Electronic Engineering Department Rufus Giwa Polytechnic OwoDocument6 pagesStudy Assessing Viability of Installing 20kw Solar Power For The Electrical & Electronic Engineering Department Rufus Giwa Polytechnic OwoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Industry That Capitalizes Off of Women's Insecurities?Document8 pagesAn Industry That Capitalizes Off of Women's Insecurities?International Journal of Innovative Science and Research TechnologyNo ratings yet
- Visual Water: An Integration of App and Web To Understand Chemical ElementsDocument5 pagesVisual Water: An Integration of App and Web To Understand Chemical ElementsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Insights Into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesDocument8 pagesInsights Into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Cities: Boosting Economic Growth Through Innovation and EfficiencyDocument19 pagesSmart Cities: Boosting Economic Growth Through Innovation and EfficiencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Parkinson's Detection Using Voice Features and Spiral DrawingsDocument5 pagesParkinson's Detection Using Voice Features and Spiral DrawingsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Impact of Silver Nanoparticles Infused in Blood in A Stenosed Artery Under The Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in A Sten. Art. Under The Eff. of Mag. FieldDocument6 pagesImpact of Silver Nanoparticles Infused in Blood in A Stenosed Artery Under The Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in A Sten. Art. Under The Eff. of Mag. FieldInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Compact and Wearable Ventilator System For Enhanced Patient CareDocument4 pagesCompact and Wearable Ventilator System For Enhanced Patient CareInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Air Quality Index Prediction Using Bi-LSTMDocument8 pagesAir Quality Index Prediction Using Bi-LSTMInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Predict The Heart Attack Possibilities Using Machine LearningDocument2 pagesPredict The Heart Attack Possibilities Using Machine LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Investigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatDocument16 pagesInvestigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Relationship Between Teacher Reflective Practice and Students Engagement in The Public Elementary SchoolDocument31 pagesThe Relationship Between Teacher Reflective Practice and Students Engagement in The Public Elementary SchoolInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Diabetic Retinopathy Stage Detection Using CNN and Inception V3Document9 pagesDiabetic Retinopathy Stage Detection Using CNN and Inception V3International Journal of Innovative Science and Research TechnologyNo ratings yet
- An Analysis On Mental Health Issues Among IndividualsDocument6 pagesAn Analysis On Mental Health Issues Among IndividualsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Implications of Adnexal Invasions in Primary Extramammary Paget's Disease: A Systematic ReviewDocument6 pagesImplications of Adnexal Invasions in Primary Extramammary Paget's Disease: A Systematic ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Harnessing Open Innovation For Translating Global Languages Into Indian LanuagesDocument7 pagesHarnessing Open Innovation For Translating Global Languages Into Indian LanuagesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Keywords:-Ibadhy Chooranam, Cataract, Kann Kasam,: Siddha Medicine, Kann NoigalDocument7 pagesKeywords:-Ibadhy Chooranam, Cataract, Kann Kasam,: Siddha Medicine, Kann NoigalInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Utilization of Date Palm (Phoenix Dactylifera) Leaf Fiber As A Main Component in Making An Improvised Water FilterDocument11 pagesThe Utilization of Date Palm (Phoenix Dactylifera) Leaf Fiber As A Main Component in Making An Improvised Water FilterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Digital Marketing Dimensions On Customer SatisfactionDocument6 pagesThe Impact of Digital Marketing Dimensions On Customer SatisfactionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Dense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)Document2 pagesDense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Advancing Healthcare Predictions: Harnessing Machine Learning For Accurate Health Index PrognosisDocument8 pagesAdvancing Healthcare Predictions: Harnessing Machine Learning For Accurate Health Index PrognosisInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Making of Object Recognition Eyeglasses For The Visually Impaired Using Image AIDocument6 pagesThe Making of Object Recognition Eyeglasses For The Visually Impaired Using Image AIInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Formulation and Evaluation of Poly Herbal Body ScrubDocument6 pagesFormulation and Evaluation of Poly Herbal Body ScrubInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Terracing As An Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains - CameroonDocument14 pagesTerracing As An Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains - CameroonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- DiseasesDocument11 pagesDiseasesapi-307430346No ratings yet
- CM658 Time - MNGT - 10 - Getting Know The Class - NewNormDocument12 pagesCM658 Time - MNGT - 10 - Getting Know The Class - NewNormLee BañezNo ratings yet
- Dharmakirti On Pratyaksa PDFDocument14 pagesDharmakirti On Pratyaksa PDFonlineyyk100% (1)
- Case Study - of Chapel of San Pedro CalungsodDocument5 pagesCase Study - of Chapel of San Pedro CalungsodJosielynNo ratings yet
- Om06 JulyaugDocument44 pagesOm06 JulyaugengineeringyusufNo ratings yet
- Tikkun Kisay HaShemDocument47 pagesTikkun Kisay HaShemYochananMauritzHummasti100% (1)
- The Light BulbDocument6 pagesThe Light Bulbapi-244765407No ratings yet
- Asme B30.26 (2004)Document38 pagesAsme B30.26 (2004)Omar RamirezNo ratings yet
- Annual Implementation Plan FinalDocument3 pagesAnnual Implementation Plan FinalMichelle Ann Narvino100% (2)
- Deaths in New York City Are More Than Double The Usual TotalDocument3 pagesDeaths in New York City Are More Than Double The Usual TotalRamón RuizNo ratings yet
- The Explanatory GapDocument2 pagesThe Explanatory GapPapuna ChivadzeNo ratings yet
- Roy B. Kantuna, MPRM, CESE: (For Midterm) (Instructor)Document8 pagesRoy B. Kantuna, MPRM, CESE: (For Midterm) (Instructor)Athena Mae DitchonNo ratings yet
- 990XP Bandit ChipperDocument5 pages990XP Bandit ChipperFrancisco ConchaNo ratings yet
- Physics 715 HW 1Document13 pagesPhysics 715 HW 1Antonildo PereiraNo ratings yet
- 2.HVT Terminacion InstrDocument18 pages2.HVT Terminacion Instrelectrica3No ratings yet
- Āyāt Al-Aḥkām, Ayat Al-AhkamDocument6 pagesĀyāt Al-Aḥkām, Ayat Al-AhkamRasoul NamaziNo ratings yet
- Capital MarketDocument5 pagesCapital MarketBalamanichalaBmcNo ratings yet
- MBenz SLK350 R171 272 RepairDocument1,922 pagesMBenz SLK350 R171 272 RepairJavier ViudezNo ratings yet
- Organizational Behavior Exam 2 Practice QuestionsDocument1 pageOrganizational Behavior Exam 2 Practice QuestionsSydney EverettNo ratings yet
- Inspection and Test Plan (ITP) For Spherical Storage Tanks: Dehloran Olefin PlantDocument9 pagesInspection and Test Plan (ITP) For Spherical Storage Tanks: Dehloran Olefin PlantbahmanNo ratings yet
- Tutorial 2 EtherchannelDocument3 pagesTutorial 2 EtherchannelOng CHNo ratings yet
- Papaer JournelDocument6 pagesPapaer JournelsonalisabirNo ratings yet
- Make - Volume 13 - Volume 13Document212 pagesMake - Volume 13 - Volume 13Pedernal Lisiao100% (2)
- AQA Power and Conflict GCSE Revision Guide LADocument49 pagesAQA Power and Conflict GCSE Revision Guide LAderaw11557No ratings yet
- SN Quick Reference 2018Document6 pagesSN Quick Reference 2018pinakin4uNo ratings yet
- Advantage Dis OqpskDocument5 pagesAdvantage Dis OqpskHarun AminurasyidNo ratings yet
- Lesson Plan Entre P Dec 7Document12 pagesLesson Plan Entre P Dec 7yannie isananNo ratings yet
- Syracuse University Dissertation FormatDocument4 pagesSyracuse University Dissertation FormatWritingContentNewYork100% (1)