You might also like
- Diploma IV - Kinematics and Kinetics of Machines Model QuestionDocument4 pagesDiploma IV - Kinematics and Kinetics of Machines Model QuestionNikhil KumarNo ratings yet
- 2 Velocity and AccelerationDocument28 pages2 Velocity and AccelerationAbdur RahmanNo ratings yet
- Mech IV Sem Question BankDocument59 pagesMech IV Sem Question BankSivaNo ratings yet
- Unit-1: Introduction: Question BankDocument12 pagesUnit-1: Introduction: Question BankAmit BharadwajNo ratings yet
- Instantaneous Centre MethodDocument30 pagesInstantaneous Centre Methodm_er100No ratings yet
- Assignment 1Document2 pagesAssignment 1Kamalesh DfcNo ratings yet
- Kom Assignment IDocument4 pagesKom Assignment IChadaram Jagadish JagadishNo ratings yet
- ME6401-Kinematics of MachineryDocument11 pagesME6401-Kinematics of Machineryappuanandh7811No ratings yet
- Question Bank KOMDocument3 pagesQuestion Bank KOMMudit MaheshwariNo ratings yet
- Tutorial PlanDocument23 pagesTutorial PlanPraveen KumarNo ratings yet
- Chapter 3 Acceleration AnalysisDocument4 pagesChapter 3 Acceleration Analysisameet_sata20000% (1)
- Theory of Machine. Question BankDocument4 pagesTheory of Machine. Question BankPriyanka YadavNo ratings yet
- 9A14402 Theory of MachinesDocument8 pages9A14402 Theory of MachinessivabharathamurthyNo ratings yet
- Kinematics of Machinery Question BankDocument5 pagesKinematics of Machinery Question BankSree MurthyNo ratings yet
- Mechanism of Machinery Velocity Analysis Worksheet PDF FreeDocument4 pagesMechanism of Machinery Velocity Analysis Worksheet PDF FreeHarsh VermaNo ratings yet
- Mechanism of Machinery Velocity Analysis WorksheetDocument4 pagesMechanism of Machinery Velocity Analysis WorksheetAgare Tube0% (1)
- B.Tech (PT) - Mechanical - II YEAR - III SEM - (R) 2012 PDFDocument12 pagesB.Tech (PT) - Mechanical - II YEAR - III SEM - (R) 2012 PDFmohamed irshadNo ratings yet
- 10 Exercise 5 Acceleration Analysis of MechanismsDocument5 pages10 Exercise 5 Acceleration Analysis of MechanismsMohamed MostafaNo ratings yet
- QB MEM404 NewDocument12 pagesQB MEM404 NewRohit DiwakarNo ratings yet
- NR 220304 Kinematics of MachineryDocument11 pagesNR 220304 Kinematics of MachinerySrinivasa Rao GNo ratings yet
- Kinematics of MachineryDocument20 pagesKinematics of Machineryvenkatkavin0% (1)
- Kom Assignments PDFDocument6 pagesKom Assignments PDFapi-263237278No ratings yet
- Kinematics OF Machinery: Adithya Institute of TechnologyDocument34 pagesKinematics OF Machinery: Adithya Institute of TechnologybalajimetturNo ratings yet
- Tom Assignment and TutorialDocument6 pagesTom Assignment and TutorialAkshay MishraNo ratings yet
- KomDocument12 pagesKomSasi KumarNo ratings yet
- Me6401 Kinematics of Machinery UNIT-I (Basics of Mechanism)Document8 pagesMe6401 Kinematics of Machinery UNIT-I (Basics of Mechanism)Ãraviñdhañ RändýNo ratings yet
- 9A03401 Kinematics of MachineryDocument8 pages9A03401 Kinematics of MachinerysivabharathamurthyNo ratings yet
- 2.kinematics of MachineryDocument14 pages2.kinematics of MachineryJegan ParamasivamNo ratings yet
- rr310304 Kinematics of MachineryDocument12 pagesrr310304 Kinematics of MachinerySrinivasa Rao GNo ratings yet
- Instantaneous Centre Method-Velocity at A Point: An Alternative Approach To The Relative Velocity MethodDocument61 pagesInstantaneous Centre Method-Velocity at A Point: An Alternative Approach To The Relative Velocity MethodKarthikeyanRamanujamNo ratings yet
- Velocity in Mechanisms: Instantaneous Centre MethodDocument17 pagesVelocity in Mechanisms: Instantaneous Centre MethodDrew LadlowNo ratings yet
- Part B & Part C Questions - Unit WiseDocument3 pagesPart B & Part C Questions - Unit WiseShobiNo ratings yet
- Question Bank KomDocument11 pagesQuestion Bank KomStar SathishNo ratings yet
- Section-A: Q. 1.1. (A) Explain Machine With Suitable ExamplesDocument59 pagesSection-A: Q. 1.1. (A) Explain Machine With Suitable ExamplesravindrababugNo ratings yet
- Nr-rr222105 Kinematics of MachineryDocument8 pagesNr-rr222105 Kinematics of MachinerySRINIVASA RAO GANTANo ratings yet
- A.R Engineering College: Villupuram Department of Mechanical EngineeringDocument14 pagesA.R Engineering College: Villupuram Department of Mechanical EngineeringVENKATESHNo ratings yet
- MCQ MechanismsDocument22 pagesMCQ Mechanismstvkbhanuprakash100% (1)
- Velocity Analysis IDocument41 pagesVelocity Analysis IDanialNo ratings yet
- Sample QuestionsDocument3 pagesSample QuestionsDilin Dinesh MENo ratings yet
- Cms College of Engineering, Namakkal: Unit 1 - Basics of MechanismsDocument17 pagesCms College of Engineering, Namakkal: Unit 1 - Basics of MechanismsRajueswarNo ratings yet
- VelocitytutorialDocument4 pagesVelocitytutorialManoz Thapa KajiNo ratings yet
- Unit Wise 16 Mark QuestionsDocument29 pagesUnit Wise 16 Mark QuestionsPreethi SharmiNo ratings yet
- Chapter 1Document20 pagesChapter 1ankursolanki13No ratings yet
- 9A21506 Mechanisms & Mechanical DesignDocument8 pages9A21506 Mechanisms & Mechanical DesignsivabharathamurthyNo ratings yet
- Theory of Machines-I - 012110043744 - 1Document17 pagesTheory of Machines-I - 012110043744 - 1alisha_4911No ratings yet
- Theory of Machines-Khurmi-123-124Document2 pagesTheory of Machines-Khurmi-123-124Star GlacierNo ratings yet
- Kinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksDocument32 pagesKinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksRameez FaroukNo ratings yet
- Kinematics of Machinary April 2021Document2 pagesKinematics of Machinary April 2021mighty statusNo ratings yet
- EMG 2208 - Mechanics of Machines - Assignment - MMU Sept 2012Document4 pagesEMG 2208 - Mechanics of Machines - Assignment - MMU Sept 2012Charles OndiekiNo ratings yet
- Kinematics of MachineryDocument8 pagesKinematics of MachinerySri RNo ratings yet
- Question BankDocument7 pagesQuestion BankmunirajNo ratings yet
- 2.kinematics of Machinery QBDocument14 pages2.kinematics of Machinery QBRagavan PalaniNo ratings yet
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsFrom EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- The Inner Workings of a Watch - A Simple Guide for Enthusiasts of Clockwork MechanismsFrom EverandThe Inner Workings of a Watch - A Simple Guide for Enthusiasts of Clockwork MechanismsNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Pressure Vessel and Stacks Field Repair ManualFrom EverandPressure Vessel and Stacks Field Repair ManualRating: 4 out of 5 stars4/5 (4)
- Karthik Keshav Bhuvan J Surya Ravishankar R V Ruthu: Done byDocument17 pagesKarthik Keshav Bhuvan J Surya Ravishankar R V Ruthu: Done bySurya RSNo ratings yet
- KOM Assignment 2020-21Document2 pagesKOM Assignment 2020-21Surya RSNo ratings yet
- LPG Refrigeration - DescriptionDocument1 pageLPG Refrigeration - DescriptionSurya RSNo ratings yet
- Kinematics of Machines - VTU QPDocument76 pagesKinematics of Machines - VTU QPSurya RSNo ratings yet
- Gear Trains - MPDocument41 pagesGear Trains - MPSurya RSNo ratings yet
- CAMS TheoryDocument16 pagesCAMS TheorySurya RSNo ratings yet
- BTD Module 5 PDFDocument20 pagesBTD Module 5 PDFAkshay ShettyNo ratings yet
- Development of Thermally Insulated Vending Cart For Fresh Fruits and VegetablesDocument19 pagesDevelopment of Thermally Insulated Vending Cart For Fresh Fruits and VegetablesSurya RSNo ratings yet
- BTD Mod4Document58 pagesBTD Mod4Surya RSNo ratings yet
- Ext 30215Document5 pagesExt 30215Surya RSNo ratings yet
- Compressor 17Document48 pagesCompressor 17Surya RSNo ratings yet
- Images Geometry+lecture+49+CIRCLE+1Document7 pagesImages Geometry+lecture+49+CIRCLE+1Nmis JaipurNo ratings yet
- Further Vectors WorksheetDocument13 pagesFurther Vectors Worksheetzhiwu2685No ratings yet
- Triangles - Geoemetry Worksheet - SAT Reasoning TestDocument9 pagesTriangles - Geoemetry Worksheet - SAT Reasoning TestGurukul24x7No ratings yet
- Mec121 - Engineering Graphics Week 4Document43 pagesMec121 - Engineering Graphics Week 4Psalmuel Victor AloNo ratings yet
- Day 16 - Unit 2 Review Day 2 SolutionsDocument5 pagesDay 16 - Unit 2 Review Day 2 Solutionsapi-253195113No ratings yet
- 8-The Pythagorean Theorem and Its ConverseeDocument2 pages8-The Pythagorean Theorem and Its Converseeapi-287488216No ratings yet
- IJOPCM (Vol 5 4 3 D 12)Document9 pagesIJOPCM (Vol 5 4 3 D 12)Fustei BogdanNo ratings yet
- Undergrad Guide TorDocument134 pagesUndergrad Guide TorEugeneNo ratings yet
- Edexcel IAL P2 Exercise 2D (Solution)Document7 pagesEdexcel IAL P2 Exercise 2D (Solution)Kaif HasanNo ratings yet
- BR Math 11Document3 pagesBR Math 11Phoenix RockiNo ratings yet
- Soal Desimal CampuranDocument2 pagesSoal Desimal CampuranMuhimatus Sa'diyahNo ratings yet
- 6 4properties of Special Parallelograms - PPSXDocument38 pages6 4properties of Special Parallelograms - PPSXFrances DayondonNo ratings yet
- CuboctahedronDocument13 pagesCuboctahedronapi-282361585No ratings yet
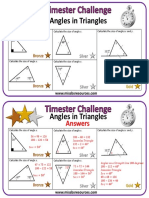
- Angles in Triangles - Timestar Challenge#Document2 pagesAngles in Triangles - Timestar Challenge#ifrahxoxhotmail.co.uk100% (1)
- The Application of Elliptical GeometryDocument3 pagesThe Application of Elliptical GeometryYola Yaneta100% (2)
- 3rd Quarterly Exam MATHDocument4 pages3rd Quarterly Exam MATHHyacinth Jara Duco100% (1)
- CAT Exam - Quants - (4) GeometryDocument1 pageCAT Exam - Quants - (4) GeometryMaths magnusNo ratings yet
- 9.4 G GHW PDFDocument2 pages9.4 G GHW PDFnav alNo ratings yet
- 1b-System of Particles and Rigid Body Dynamics (51-83)Document33 pages1b-System of Particles and Rigid Body Dynamics (51-83)Kartik SurwaseNo ratings yet
- Hyperbolic TreeDocument2 pagesHyperbolic Treecharlotte899No ratings yet
- Geometry Final Exam: Multiple ChoiceDocument15 pagesGeometry Final Exam: Multiple ChoicedanitNo ratings yet
- Circles EnglishDocument12 pagesCircles EnglishSatya Prakash ChaudharyNo ratings yet
- Summative Test No. 1Document6 pagesSummative Test No. 1Shaine Dzyll KuizonNo ratings yet
- Introduction To Draw Panels and Different Drawing Tools: University of Engineering & Technology, TaxilaDocument5 pagesIntroduction To Draw Panels and Different Drawing Tools: University of Engineering & Technology, TaxilaranaNo ratings yet
- Weiss Zone Law and Zone AxesDocument4 pagesWeiss Zone Law and Zone AxesthuronNo ratings yet
- UPCAT Review MathDocument13 pagesUPCAT Review MathBea Lha Zandra BesingaNo ratings yet
- Item Analysis and TOS For G1 Q3Document13 pagesItem Analysis and TOS For G1 Q3Elizabeth GonzagaNo ratings yet
- LP-Math7-COT-Q3wk2, 23-24Document20 pagesLP-Math7-COT-Q3wk2, 23-24villapazmichael30No ratings yet
- Dilations The Coordinate PlaneDocument13 pagesDilations The Coordinate PlaneYusef ShehadeNo ratings yet
- MESL - Analytic Geometry 1Document7 pagesMESL - Analytic Geometry 1Mark-Lorie Duculan NonesNo ratings yet