You might also like
- Aamc MCAT Test 9Document83 pagesAamc MCAT Test 9Alex Alexander100% (3)
- Tom Bearden - The Physics of Psionics - Radionics Action at A DistanceDocument51 pagesTom Bearden - The Physics of Psionics - Radionics Action at A DistanceExopolitika Magyarország89% (9)
- Transformer: Disediakan Oleh: Siti Fatimah Binti Mohd JamilDocument39 pagesTransformer: Disediakan Oleh: Siti Fatimah Binti Mohd JamilSiti Fatimah Mohd Jamil100% (1)
- Ed Leedskalnin MagnetismDocument22 pagesEd Leedskalnin MagnetismGreg Soon100% (2)
- Work and EnergyDocument28 pagesWork and EnergyMir'atun Nissa QuinalendraNo ratings yet
- 6V To 12V DC Converter CircuitsDocument3 pages6V To 12V DC Converter CircuitsCarloNo ratings yet
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- Chapter Test FORCEDocument5 pagesChapter Test FORCEArnulfo Villasfer SantiagoNo ratings yet
- 1 - Modelling of Soil Behaviour 16082020Document87 pages1 - Modelling of Soil Behaviour 16082020rihongkeeNo ratings yet
- Lecture 5-Mathematical Modeling of Mechanical SystemsDocument93 pagesLecture 5-Mathematical Modeling of Mechanical SystemsNoor Ahmed100% (2)
- Tutorials in Complex Photonic Media SPIE Press Monograph Vol PM194 PDFDocument729 pagesTutorials in Complex Photonic Media SPIE Press Monograph Vol PM194 PDFBadunoniNo ratings yet
- Quasi Concavity Quasi ConvexityDocument30 pagesQuasi Concavity Quasi ConvexityQrazyKat100% (1)
- Ansi C57.13-1978Document66 pagesAnsi C57.13-1978Jamila A. Smith100% (1)
- SR - No. Description Particulars: Shilchar Technologies Limited::::::::::::::::::::::::::::::::: Gauranteed & Other ParticularsDocument1 pageSR - No. Description Particulars: Shilchar Technologies Limited::::::::::::::::::::::::::::::::: Gauranteed & Other Particularsram krishnanNo ratings yet
- 3.mathematical Modeling of Mechanical Systems and Electrical SystemsDocument49 pages3.mathematical Modeling of Mechanical Systems and Electrical SystemsMikiNo ratings yet
- Work Energy PowerDocument12 pagesWork Energy PowerdrpigaNo ratings yet
- 007 Examples Constraints and Lagrange EquationsDocument12 pages007 Examples Constraints and Lagrange EquationsImran AnjumNo ratings yet
- Energy and Energy TransferDocument13 pagesEnergy and Energy TransferFaris AlasmariNo ratings yet
- 03 Work and Energy VdefDocument34 pages03 Work and Energy VdefJose Manuel BrotonsNo ratings yet
- Phys1 Ch3 Workenergy NewDocument58 pagesPhys1 Ch3 Workenergy NewDuy ĐỗNo ratings yet
- Work and Kinetic Energy: Powerpoint Lectures ForDocument16 pagesWork and Kinetic Energy: Powerpoint Lectures ForJonNo ratings yet
- Chapter 1 Principle of Virtual WorkDocument7 pagesChapter 1 Principle of Virtual WorkeltytanNo ratings yet
- EnergyDocument6 pagesEnergyapi-3806615No ratings yet
- Cve10004 L05Document33 pagesCve10004 L05Evena FungNo ratings yet
- PHS 211 - NewestDocument24 pagesPHS 211 - NewestRidwan BadmusNo ratings yet
- Ch07-Energia TrabalhoDocument14 pagesCh07-Energia TrabalhoJosé SearaNo ratings yet
- Serie 1 Aufgaben enDocument3 pagesSerie 1 Aufgaben enHong Chul NamNo ratings yet
- AP10005 - Physics I AP10008 - University Physics I: Energy of A System & Conservation of EnergyDocument30 pagesAP10005 - Physics I AP10008 - University Physics I: Energy of A System & Conservation of EnergyShibu AlexanderNo ratings yet
- Chapter 7 - Kinetic Energy, Potential Energy, WorkDocument28 pagesChapter 7 - Kinetic Energy, Potential Energy, WorkAeron ArestaNo ratings yet
- Work and EnergyDocument20 pagesWork and EnergyAli Ib TarshaNo ratings yet
- V. Work and EnergyDocument79 pagesV. Work and EnergyJekjek LobatonNo ratings yet
- Physics-1 - WORK POWER ENERGY-01 - TheoryDocument17 pagesPhysics-1 - WORK POWER ENERGY-01 - TheoryRaju SinghNo ratings yet
- Maxwell's Equations and Light Waves: Electric FieldDocument32 pagesMaxwell's Equations and Light Waves: Electric FieldSiddharth RajamohananNo ratings yet
- Lecture06 P1Document21 pagesLecture06 P1Cao Gia BảoNo ratings yet
- 1021 - T01-C2 - Gravitational Potential and SatelliteDocument16 pages1021 - T01-C2 - Gravitational Potential and SatelliteQuiz LetNo ratings yet
- Chapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Document73 pagesChapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Patrick SibandaNo ratings yet
- Physics430 Lecture04Document22 pagesPhysics430 Lecture04chaciNo ratings yet
- Chapter 2Document82 pagesChapter 2Joenkon LiNo ratings yet
- P101 Lec 0809Document24 pagesP101 Lec 0809Dump HanzelNo ratings yet
- Constraints PDFDocument13 pagesConstraints PDFabhayNo ratings yet
- Atomic Structure 2Document30 pagesAtomic Structure 2Prarabdha SharmaNo ratings yet
- Shaheen Public H/S School Mirpur Mathelo CH # 07 Work Power and Energy By: Laghari Zoheb HassanDocument40 pagesShaheen Public H/S School Mirpur Mathelo CH # 07 Work Power and Energy By: Laghari Zoheb HassanLaghari Hassan XohebNo ratings yet
- Wk8 Lectrure8 21nov2017 NewformatDocument14 pagesWk8 Lectrure8 21nov2017 Newformatهاني احمدNo ratings yet
- Energía Potencial: Quick Quiz 7.5Document4 pagesEnergía Potencial: Quick Quiz 7.5Jorge ̶S̶o̶r̶i̶a̶n̶o̶No ratings yet
- Ch6. Work and Energy Work Done by A Constant ForceDocument93 pagesCh6. Work and Energy Work Done by A Constant ForceKtel R MacarioNo ratings yet
- P1 - L5 - Work and Energy PDFDocument28 pagesP1 - L5 - Work and Energy PDFBrandy Tran100% (1)
- Dynamics 2 No1Document19 pagesDynamics 2 No1NickNo ratings yet
- 5.work Energy and PowerExercise STEMDocument46 pages5.work Energy and PowerExercise STEMAssem HefnyNo ratings yet
- Chapter 5 Work Energy and MomentumDocument11 pagesChapter 5 Work Energy and MomentumKF YipNo ratings yet
- CE Board Nov 2022 Engineering Mechanics Set 1Document3 pagesCE Board Nov 2022 Engineering Mechanics Set 1Meverlyn RoqueroNo ratings yet
- CH6-Onservation of EnergyDocument10 pagesCH6-Onservation of EnergyJAZZNo ratings yet
- Physics 430: Lecture 2 Newton's 2 Law in Cartesian and Polar CoordinatesDocument17 pagesPhysics 430: Lecture 2 Newton's 2 Law in Cartesian and Polar CoordinatesDapperNo ratings yet
- Paper On GravitationDocument8 pagesPaper On GravitationShama tanveerNo ratings yet
- Work and EnergyDocument26 pagesWork and Energyaljohnbondad121521No ratings yet
- 1 Conventions: Integration For Shear and Moment DiagramsDocument7 pages1 Conventions: Integration For Shear and Moment DiagramsCarl SorensenNo ratings yet
- W4 - Translational Mechanical System Transfer FunctionDocument15 pagesW4 - Translational Mechanical System Transfer FunctionMamoon KhanNo ratings yet
- Work-Energy & PowerDocument26 pagesWork-Energy & PowerProf. Vijay PingaleNo ratings yet
- B. Introduction To Fourier Transform, 1D ContinuousDocument102 pagesB. Introduction To Fourier Transform, 1D Continuoussireesha marriNo ratings yet
- Phys 1011 Work-Energy NotesDocument7 pagesPhys 1011 Work-Energy Notesnigusayele06No ratings yet
- Wpe PDFDocument47 pagesWpe PDFDewesh ChauhanNo ratings yet
- 2 Engleza Oscilatii ArmoniceDocument12 pages2 Engleza Oscilatii ArmoniceMIRCEA-PAUL TĂNĂSESCUNo ratings yet
- 1 Mechanics: ContentDocument9 pages1 Mechanics: ContentJoe RowingNo ratings yet
- Lecture D8 - Conservative Forces and Potential Energy: J. Peraire 16.07 Dynamics Fall 2004Document5 pagesLecture D8 - Conservative Forces and Potential Energy: J. Peraire 16.07 Dynamics Fall 2004ADVIE4 AllenNo ratings yet
- Work Power Energy Formula SheetDocument5 pagesWork Power Energy Formula SheetAman Singh100% (1)
- Physics 430: Lecture 7 Kinetic and Potential Energy: Dale E. GaryDocument17 pagesPhysics 430: Lecture 7 Kinetic and Potential Energy: Dale E. GaryCole CitrenbaumNo ratings yet
- Physics430 Lecture04Document22 pagesPhysics430 Lecture04Azwar SutionoNo ratings yet
- Chapter 2. Lagrangian Formalism: Essential Graduate Physics CM: Classical MechanicsDocument14 pagesChapter 2. Lagrangian Formalism: Essential Graduate Physics CM: Classical MechanicsplfratarNo ratings yet
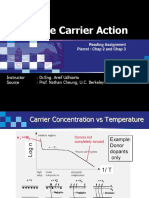
- Mobile Carrier Action: Instructor: DR - Eng. Arief Udhiarto Source: Prof. Nathan Cheung, U.C. BerkeleyDocument23 pagesMobile Carrier Action: Instructor: DR - Eng. Arief Udhiarto Source: Prof. Nathan Cheung, U.C. BerkeleyMess YeahNo ratings yet
- NWPP Power and Reactive Sign ConventionsDocument2 pagesNWPP Power and Reactive Sign ConventionszeeshanygNo ratings yet
- Week 4 - Instructional Module - EE221 - EE222Document11 pagesWeek 4 - Instructional Module - EE221 - EE222AB CEDENo ratings yet
- 3x95 SM+ 1x50 RM 2XBY (YJV22)Document1 page3x95 SM+ 1x50 RM 2XBY (YJV22)jamil100% (1)
- DET Series Earth Ground Electrode TestersDocument46 pagesDET Series Earth Ground Electrode TestersGaya HidupNo ratings yet
- Sheet 4 HVDocument2 pagesSheet 4 HVEng KapoNo ratings yet
- By Robert L. Piccioni, PH.D.: "Einstein For Everyone"Document2 pagesBy Robert L. Piccioni, PH.D.: "Einstein For Everyone"Shivam kumarNo ratings yet
- Dossier BATERIES enDocument14 pagesDossier BATERIES enNacer Mezghiche100% (1)
- Arihant Aieee Physics (Nitin M Sir)Document376 pagesArihant Aieee Physics (Nitin M Sir)aashray1852175% (4)
- COPO Mapping 18-19Document18 pagesCOPO Mapping 18-19Satej KelkarNo ratings yet
- Power System Operation and ControlDocument8 pagesPower System Operation and Controlrajaniram100% (2)
- Ewald Summation For Systems With Slab GeometryDocument9 pagesEwald Summation For Systems With Slab GeometryDouglasNo ratings yet
- EXPERIMENTDocument2 pagesEXPERIMENTGracilla ElmidoNo ratings yet
- The Sussex VT1: As Interpreted by Les Carpenter G4CNHDocument27 pagesThe Sussex VT1: As Interpreted by Les Carpenter G4CNHrogerio pessanha dos santosNo ratings yet
- Service Manual: 27" Color TelevisionDocument54 pagesService Manual: 27" Color TelevisionEnriqueNo ratings yet
- Development of Quantum Mechanics: Earning BjectivesDocument83 pagesDevelopment of Quantum Mechanics: Earning Bjectivesshubham tejaniNo ratings yet
- Chapter 3 Large Sclae ClassDocument59 pagesChapter 3 Large Sclae ClassAnonymous H6bzpSwYtNo ratings yet
- Lab Questions and BooksDocument3 pagesLab Questions and BooksAsrar Hussain BhatNo ratings yet
- Section 6 S C: Emiconductor OnvertorsDocument3 pagesSection 6 S C: Emiconductor OnvertorsJon LopezNo ratings yet
- Genfocus List of EquiptmentsDocument83 pagesGenfocus List of EquiptmentsLawrence D'souzaNo ratings yet
- 8 To 9Document165 pages8 To 9Venkatesan DevendranNo ratings yet