You might also like
- Judd EIC2011 ManuscriptDocument6 pagesJudd EIC2011 ManuscriptNguyen Vu Nhat HaNo ratings yet
- An Online UHF PD Monitoring System For Power Transformer and Its ApplicationsDocument4 pagesAn Online UHF PD Monitoring System For Power Transformer and Its ApplicationsHoang PhapNo ratings yet
- CMDPaper HuaChaiDocument6 pagesCMDPaper HuaChaiCaio FlemingNo ratings yet
- UHF PD: Non-Conventional Sensors For Measurements On GIS of Different DesignsDocument6 pagesUHF PD: Non-Conventional Sensors For Measurements On GIS of Different DesignsthetrasancosNo ratings yet
- Sensors 23 03405 v2Document21 pagesSensors 23 03405 v2Caio FlemingNo ratings yet
- F 03Document4 pagesF 03daulanayNo ratings yet
- GIS PD MeasurementDocument5 pagesGIS PD Measurementrasool waniNo ratings yet
- Condition Assessment of Power Transformers in Service Using PD MonitoringDocument13 pagesCondition Assessment of Power Transformers in Service Using PD MonitoringDaniel CabraNo ratings yet
- XLPE PD DetectionDocument4 pagesXLPE PD DetectionClaysius DewanataNo ratings yet
- C4-201 Insulation Monitoring FinalDocument10 pagesC4-201 Insulation Monitoring FinalMarcosGodoyPereyraNo ratings yet
- Application of HFCT and UHF Sensors in On-Line Partial Discharge Measurements For Insulation Diagnosis of High Voltage EquipmentDocument29 pagesApplication of HFCT and UHF Sensors in On-Line Partial Discharge Measurements For Insulation Diagnosis of High Voltage EquipmentDeepen SharmaNo ratings yet
- Partial Discharge Signal Detection UsingDocument6 pagesPartial Discharge Signal Detection UsingsunilNo ratings yet
- Relative Ability of UHF Antenna and VHF Capacitor Methods To Detect Partial Discharge in Turbine Generator Stator WindingsDocument10 pagesRelative Ability of UHF Antenna and VHF Capacitor Methods To Detect Partial Discharge in Turbine Generator Stator WindingsMichal KowalczykNo ratings yet
- HVPD - CIRED 2013 - Combined Power Quality and Condition Monitoring of Offshore NetworksDocument4 pagesHVPD - CIRED 2013 - Combined Power Quality and Condition Monitoring of Offshore NetworksShady NasrNo ratings yet
- Microstrip Patch Antenna Based UHF Sensor For Detection of Partial Discharge in High Voltage Electrical EquipmentsDocument6 pagesMicrostrip Patch Antenna Based UHF Sensor For Detection of Partial Discharge in High Voltage Electrical Equipmentsmiri luceroNo ratings yet
- Partial Discharge Localization Techniques - A Review of Recent ProgressDocument31 pagesPartial Discharge Localization Techniques - A Review of Recent ProgressAM KANo ratings yet
- Partial Discharge Diagnostics On Gis Using Uhf and Acoustic MethodDocument5 pagesPartial Discharge Diagnostics On Gis Using Uhf and Acoustic MethodmersiumNo ratings yet
- Experiences With Acoustic Localization of PD in PT With UHF HIGHVOLT 2015 Hoek ENUDocument8 pagesExperiences With Acoustic Localization of PD in PT With UHF HIGHVOLT 2015 Hoek ENUMaheshNo ratings yet
- A Versatile System For PD Diagnostics: L. V. Badicu, W. Koltunowicz, O. KrauseDocument4 pagesA Versatile System For PD Diagnostics: L. V. Badicu, W. Koltunowicz, O. KrauseNguyen Vu Nhat HaNo ratings yet
- 2018 - Neuhold - Return of Experience CIGREDocument13 pages2018 - Neuhold - Return of Experience CIGREbenlahnecheNo ratings yet
- Partial Discharge Detection and Location in Transformers by Performing Partial Discharge Tests in Oil Using Uhf SensorsDocument25 pagesPartial Discharge Detection and Location in Transformers by Performing Partial Discharge Tests in Oil Using Uhf SensorsPalanisamy BalasubramaniNo ratings yet
- On-Site PD Diagnostics, FRA and Moisture Measurement For Power TransformersDocument6 pagesOn-Site PD Diagnostics, FRA and Moisture Measurement For Power Transformersalireza shaNo ratings yet
- Online Partial Discharge Monitoring and Discharge Localization On Transformers by Means of UHF Method Final Rev. 1Document8 pagesOnline Partial Discharge Monitoring and Discharge Localization On Transformers by Means of UHF Method Final Rev. 1benlahnecheNo ratings yet
- Condition Assessment of MV Switchboards: Performance of A New Sensors For Partial Discharge MonitoringDocument5 pagesCondition Assessment of MV Switchboards: Performance of A New Sensors For Partial Discharge MonitoringChen Chih LiangNo ratings yet
- Setup and Preliminary Results of A Pilot On-Line Cable PD Monitoring System On An 11 KV Switchboard Using Capacitive CouplersDocument4 pagesSetup and Preliminary Results of A Pilot On-Line Cable PD Monitoring System On An 11 KV Switchboard Using Capacitive Couplerssnigdha_musiclover0% (1)
- CIGRE - Paris-Application of Partial Discharge Diagnostic Technique On High Voltage Cable Sealing EndsDocument9 pagesCIGRE - Paris-Application of Partial Discharge Diagnostic Technique On High Voltage Cable Sealing EndsKarthik SriramakavachamNo ratings yet
- B1 - 202 - 2014 Diagnostic Testing and On-Line Condition Monitoring of Cable Systems Based On Partial Discharge MeasurementsDocument11 pagesB1 - 202 - 2014 Diagnostic Testing and On-Line Condition Monitoring of Cable Systems Based On Partial Discharge MeasurementsNamLeNo ratings yet
- Wireless Acoustic Wave Sensors and Systems For Harsh EnvironmentDocument6 pagesWireless Acoustic Wave Sensors and Systems For Harsh EnvironmentnguyenphucthuanNo ratings yet
- 2014 CIGRE D1-202 Application of The UHF Technology To Detect and Locate Partial Discharges in Liquid Immersed Transformer-2014Document10 pages2014 CIGRE D1-202 Application of The UHF Technology To Detect and Locate Partial Discharges in Liquid Immersed Transformer-2014Hartanto KartojoNo ratings yet
- Development of Smart Online Partial Discharge MoniDocument8 pagesDevelopment of Smart Online Partial Discharge MoniJayasoruban RamakrishnanNo ratings yet
- Detection and Location of PD in MV Cables in Electrically Noisy Industrial EnvironmentsDocument4 pagesDetection and Location of PD in MV Cables in Electrically Noisy Industrial EnvironmentsBenhar ImadNo ratings yet
- 2001 Eic SWGDocument8 pages2001 Eic SWGKUNALJAYNo ratings yet
- HVPD On Line PD Testing Monitoring HV Cable Sealing Ends CIGRE Aug 08Document8 pagesHVPD On Line PD Testing Monitoring HV Cable Sealing Ends CIGRE Aug 08latifNo ratings yet
- Recent Developments For On Line PartialDocument7 pagesRecent Developments For On Line PartialsunilNo ratings yet
- Evaluation of Travelling Wave Based Protection SCHDocument6 pagesEvaluation of Travelling Wave Based Protection SCHGeorge Ariel SantillánNo ratings yet
- Partial Discharge Measurement and Monitoring On High Voltage XLPE CablesDocument14 pagesPartial Discharge Measurement and Monitoring On High Voltage XLPE CableskarakoukasNo ratings yet
- Application of The Integrated AE and HFCT Sensors For Online Dry-Type Transformer Partial Discharge Monitoring. Case StudyDocument7 pagesApplication of The Integrated AE and HFCT Sensors For Online Dry-Type Transformer Partial Discharge Monitoring. Case Studyduong nguyenNo ratings yet
- Partial Discharge Measurements On 110kV Current Transformers. Setting The Control Value. Case StudyDocument9 pagesPartial Discharge Measurements On 110kV Current Transformers. Setting The Control Value. Case StudyHafiziAhmadNo ratings yet
- ELT 288 2PDDetectionDocument4 pagesELT 288 2PDDetectionTXEMANo ratings yet
- Separations 03 00002 v3Document12 pagesSeparations 03 00002 v3Csaba AndrásNo ratings yet
- Partial Discharges. Their Mechanism Detection and MeasurementDocument46 pagesPartial Discharges. Their Mechanism Detection and MeasurementHUGO GOMESNo ratings yet
- Cognitive Spectrum Sensing Techniques A Brief ReviewDocument4 pagesCognitive Spectrum Sensing Techniques A Brief ReviewEditor IJRITCCNo ratings yet
- Partial Discharge Test On HT Switchgear: Customer: EssarDocument4 pagesPartial Discharge Test On HT Switchgear: Customer: Essarhemant madanNo ratings yet
- In Uence of Dielectric Window On The Performance of Window-Type UHF PD SensorsDocument6 pagesIn Uence of Dielectric Window On The Performance of Window-Type UHF PD SensorsДенис ЛяпуновNo ratings yet
- Yaacob2014 Article ReviewOnPartialDischargeDetectDocument13 pagesYaacob2014 Article ReviewOnPartialDischargeDetectErhan KarabasNo ratings yet
- PD 6 Online PD Monitoring Power CablesDocument21 pagesPD 6 Online PD Monitoring Power CablesAbhishek GuptaNo ratings yet
- PD Testing and Monitoring of HV XLPE Cable Systems ENUDocument7 pagesPD Testing and Monitoring of HV XLPE Cable Systems ENUAnh Tuan NguyenNo ratings yet
- Detection Classification and Location ofDocument24 pagesDetection Classification and Location ofHasan Basri CobanNo ratings yet
- Design of High Voltage Filter For Power Transformer TestingDocument6 pagesDesign of High Voltage Filter For Power Transformer TestingmayureshNo ratings yet
- IEEE 1434 - OffLine Vs OnLine PD in Rotating Machinery PDFDocument3 pagesIEEE 1434 - OffLine Vs OnLine PD in Rotating Machinery PDFErick DextreNo ratings yet
- Diagnosis and Fault Findings On Power Transformers: Presentation 10.1Document8 pagesDiagnosis and Fault Findings On Power Transformers: Presentation 10.1carlos suarezNo ratings yet
- DIGITAL SUBSTATION - Tests of Process Bus With GIS Non Conventional Instrument TransformersDocument10 pagesDIGITAL SUBSTATION - Tests of Process Bus With GIS Non Conventional Instrument Transformersraghavendran raghuNo ratings yet
- Partial Discharge Measurement Coupling MethodsDocument2 pagesPartial Discharge Measurement Coupling MethodskashifNo ratings yet
- CSE - 27 b1 Best Practices For Partial Discharge Monitoring of HVDC Cable Systems and Qualification TestsDocument14 pagesCSE - 27 b1 Best Practices For Partial Discharge Monitoring of HVDC Cable Systems and Qualification TestsTXEMANo ratings yet
- 2013 03 PotM Monitoring of 420 KV XLPE Cable System in Underground Tunnel ENU PDFDocument5 pages2013 03 PotM Monitoring of 420 KV XLPE Cable System in Underground Tunnel ENU PDFreza515heiNo ratings yet
- 1205 CIRED2011 FinalDocument5 pages1205 CIRED2011 FinallumoodleyNo ratings yet
- Partial Discharge Detection Using PDS 10Document4 pagesPartial Discharge Detection Using PDS 10sunilNo ratings yet
- Modelling in High Voltage EquipmentDocument22 pagesModelling in High Voltage EquipmentMahutaNo ratings yet
- Importance of NDTDocument10 pagesImportance of NDTLalit Bom MallaNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageFrom EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageNo ratings yet
- New Tools For Diagnostic Measurements On Power TransformersDocument4 pagesNew Tools For Diagnostic Measurements On Power TransformersCaio FlemingNo ratings yet
- Publishedvershion AxialDocument9 pagesPublishedvershion AxialCaio FlemingNo ratings yet
- InTechOpen Chapter Performance MetricsDocument3 pagesInTechOpen Chapter Performance MetricsCaio FlemingNo ratings yet
- Online Power Trfo AnalysisDocument6 pagesOnline Power Trfo AnalysisCaio FlemingNo ratings yet
- On-Line Capacitance and Dissipation Factor MonitorDocument13 pagesOn-Line Capacitance and Dissipation Factor MonitorCaio FlemingNo ratings yet
- Statisctical AnalysisDocument6 pagesStatisctical AnalysisCaio FlemingNo ratings yet
- National Instruments NI 9871 Manual 20191111141359Document26 pagesNational Instruments NI 9871 Manual 20191111141359Caio FlemingNo ratings yet
- Partial Discharge Locationusing Unsynchronized Radiometer Networkfor Condition Monitoringin HVSubstations AProposed ApproachDocument12 pagesPartial Discharge Locationusing Unsynchronized Radiometer Networkfor Condition Monitoringin HVSubstations AProposed ApproachCaio FlemingNo ratings yet
- ACS713 DatasheetDocument15 pagesACS713 DatasheetCaio FlemingNo ratings yet
- Simulation of Internal Partial Discharge in Solid DielectricsDocument7 pagesSimulation of Internal Partial Discharge in Solid Dielectricsbadhured sudgayleNo ratings yet
- A Modal-Based Balancing Method For A High-Speed RoDocument12 pagesA Modal-Based Balancing Method For A High-Speed Rojorge rabelloNo ratings yet
- Machine Studio General FunctionsDocument222 pagesMachine Studio General FunctionsCaio FlemingNo ratings yet
- A Computational Approach To Analyze UnbalancingDocument11 pagesA Computational Approach To Analyze Unbalancingjorge rabelloNo ratings yet
- Advanced Field BalancingDocument33 pagesAdvanced Field BalancingAmir Mahmoud Mahdavi Abhari100% (1)
- Two-Plane Balancing Using Portable Data Acquisition Card and LabviewDocument6 pagesTwo-Plane Balancing Using Portable Data Acquisition Card and LabviewCaio FlemingNo ratings yet
- Balance Quality Requirements of Rigid Rotors - The Practical Application of ISO 1940-1Document11 pagesBalance Quality Requirements of Rigid Rotors - The Practical Application of ISO 1940-1FabbroxNo ratings yet
- Proposal For 3 X HFCT100: HVPD - Co.ukDocument6 pagesProposal For 3 X HFCT100: HVPD - Co.ukCaio FlemingNo ratings yet
- 14 138 Icete16 MCH Pid129Document6 pages14 138 Icete16 MCH Pid129Caio FlemingNo ratings yet
- Conductor Size CalculationDocument5 pagesConductor Size CalculationElavarasan100% (1)
- Manual I-24xW-S PDFDocument120 pagesManual I-24xW-S PDFMario Junior0% (1)
- A Reduced Complexity Time-Domain Transmitter For UF-OFDMDocument5 pagesA Reduced Complexity Time-Domain Transmitter For UF-OFDMmehran_4xNo ratings yet
- New Asynchronous Fifo DesignDocument11 pagesNew Asynchronous Fifo DesignHitesh AhujaNo ratings yet
- Assignment 10: Unit 13 - Week 10Document4 pagesAssignment 10: Unit 13 - Week 10Anjali YadavNo ratings yet
- 742264Document2 pages742264Taposh Kumar BiswasNo ratings yet
- 3m Filtrete Fap 04 SeriesDocument10 pages3m Filtrete Fap 04 SeriesJP anonymousNo ratings yet
- Comparison Between Serial Adder and para PDFDocument3 pagesComparison Between Serial Adder and para PDFvenkatNo ratings yet
- Underground 66 75 Modern Power Transformers Hitachi ABBDocument10 pagesUnderground 66 75 Modern Power Transformers Hitachi ABBjatin patelNo ratings yet
- Crane: Technical Specification For EOT Crane Data Sheet 01Document10 pagesCrane: Technical Specification For EOT Crane Data Sheet 01adymenonNo ratings yet
- VT Catalog PDFDocument11 pagesVT Catalog PDFShreya SharmaNo ratings yet
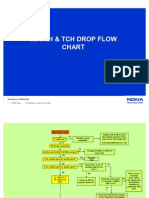
- SDCCH & TCH Drop AnalysisDocument3 pagesSDCCH & TCH Drop AnalysisrakeshkyNo ratings yet
- Lesson: Electromagnetic WavesDocument4 pagesLesson: Electromagnetic WavesHuey TingNo ratings yet
- GauravDocument26 pagesGauravgauravNo ratings yet
- Slide On Line CodingDocument43 pagesSlide On Line CodingShahin AhmedNo ratings yet
- GT 1200 en DM Printc (1010.08)Document2 pagesGT 1200 en DM Printc (1010.08)monitex_twNo ratings yet
- Facilities Chemical SpareDocument73 pagesFacilities Chemical SparesamuelNo ratings yet
- ComputerDocument3 pagesComputerjamalcabdi731No ratings yet
- Zenitel - ESC-1 - 1023000000Document4 pagesZenitel - ESC-1 - 1023000000amir11601No ratings yet
- Rode nt5 Product - Manual PDFDocument8 pagesRode nt5 Product - Manual PDFsirvientedediosNo ratings yet
- AT89S52Document20 pagesAT89S52Bhargav GoudNo ratings yet
- 26MF605W - LCD TV MonitorDocument108 pages26MF605W - LCD TV MonitorJesus SilvaNo ratings yet
- Agolar PCB Catalogue 2022-23Document41 pagesAgolar PCB Catalogue 2022-23Karthikeyan .NNo ratings yet
- MICRONIX Lithium Battery CatalogDocument8 pagesMICRONIX Lithium Battery CatalogLokanathan ArriaNo ratings yet
- SCHEDULE OF LOADS-ModelDocument1 pageSCHEDULE OF LOADS-ModelRommel TagalagNo ratings yet
- Basic Metal DetectionDocument36 pagesBasic Metal DetectionAnthony ProdeniantaNo ratings yet
- Manual FLC3 70Document1 pageManual FLC3 70joNo ratings yet
- Fiber Optic Communications Fiber Optic Communications: EE4367 Telecom. Switching & TransmissionDocument25 pagesFiber Optic Communications Fiber Optic Communications: EE4367 Telecom. Switching & TransmissionnhatvpNo ratings yet
- Basic Electrical Characteristics and Application Designs of Low-I PhotocouplersDocument31 pagesBasic Electrical Characteristics and Application Designs of Low-I PhotocouplersWagner MirandaNo ratings yet