You might also like
- MS-S3 User ManualDocument9 pagesMS-S3 User ManualParthiv DharaNo ratings yet
- MS-L3 Servo-Stepper Drive User ManualDocument12 pagesMS-L3 Servo-Stepper Drive User ManualAsistencia Técnica JLFNo ratings yet
- R F M 2 2 B / 2 3 B: Rfm22B/23B Ism Transceiver ModuleDocument70 pagesR F M 2 2 B / 2 3 B: Rfm22B/23B Ism Transceiver Moduleاحمد جاسمNo ratings yet
- Infineon_TLE9251V_DataSheet_v01_11_EN-3167665Document31 pagesInfineon_TLE9251V_DataSheet_v01_11_EN-3167665Julio Cesar Tapia ReyesNo ratings yet
- STSPIN820: Advanced 256 Microsteps Integrated Motor Driver With Step-Clock and Direction InterfaceDocument29 pagesSTSPIN820: Advanced 256 Microsteps Integrated Motor Driver With Step-Clock and Direction InterfaceIsela LopezNo ratings yet
- Adtzp0bb (AC1-ing)Document62 pagesAdtzp0bb (AC1-ing)mirko coppiniNo ratings yet
- TLE5012B: 1 FeaturesDocument51 pagesTLE5012B: 1 FeaturesAbdi PrasetyoNo ratings yet
- Infineon IMC100 DataSheet v01 06 enDocument54 pagesInfineon IMC100 DataSheet v01 06 enHATEM68No ratings yet
- Integrated Stepper Motor Driver For Bipolar Stepper Motors With Microstepping and Programmable Current ProfileDocument40 pagesIntegrated Stepper Motor Driver For Bipolar Stepper Motors With Microstepping and Programmable Current ProfileReverse EngineeringNo ratings yet
- Bts 7960Document28 pagesBts 7960Nairo FilhoNo ratings yet
- Infineon TLE9250V DataSheet v01 - 11 ENDocument27 pagesInfineon TLE9250V DataSheet v01 - 11 ENGalileo ElétricaNo ratings yet
- RS Series AC Servo DriverDocument206 pagesRS Series AC Servo DriverKlara DominyakNo ratings yet
- SmartGen - HGM6400 - v1.0 - enDocument45 pagesSmartGen - HGM6400 - v1.0 - enkevNo ratings yet
- DatasheetDocument54 pagesDatasheetМихаил НеизвестновичNo ratings yet
- MFJ Enterprises, IncDocument20 pagesMFJ Enterprises, Incluiz augusto torrecilhas TorrecilhasNo ratings yet
- ConMed Hyfrecator 2000 Service ManualDocument72 pagesConMed Hyfrecator 2000 Service Manualbbaboom100% (2)
- Digital Magnetometer: Xtrinsic MAG3110 Three-AxisDocument30 pagesDigital Magnetometer: Xtrinsic MAG3110 Three-Axislevietphong100% (1)
- CPC5620 21Document18 pagesCPC5620 21teguhscribdNo ratings yet
- AS5055 Datasheet v1 1Document21 pagesAS5055 Datasheet v1 1mohamedsamimorsiNo ratings yet
- XDPL8105 - Digital Flyback Controller IC: About This DocumentDocument33 pagesXDPL8105 - Digital Flyback Controller IC: About This Documentzuffflor_925748656No ratings yet
- Infineon xmc1300 - AB DS v02 - 00 ENDocument78 pagesInfineon xmc1300 - AB DS v02 - 00 ENcuonglammanh98No ratings yet
- Infineon xmc1200 - AB DS v01 - 08 EN 1227817Document77 pagesInfineon xmc1200 - AB DS v01 - 08 EN 1227817AdrianaSGNo ratings yet
- FSCUT2000C Laser Cutting Control System User ManualV3.1Document69 pagesFSCUT2000C Laser Cutting Control System User ManualV3.1Waldemar Merchel100% (1)
- Controller HAT600NBDocument24 pagesController HAT600NBOrlando David Zeña SandovalNo ratings yet
- ATtiny4 5 9 10 Data Sheet DS40002060A PDFDocument173 pagesATtiny4 5 9 10 Data Sheet DS40002060A PDFEric Nevermore MargayNo ratings yet
- RFM22 ManualDocument150 pagesRFM22 ManualksajjNo ratings yet
- Commander SK - Control TechniquesDocument81 pagesCommander SK - Control TechniquesLeo Dos RamosNo ratings yet
- stm8t143Document65 pagesstm8t143Ravinder Reddy ANo ratings yet
- 960 0106 01 SignalFire Din Mount Ranger Manual Rev 1Document39 pages960 0106 01 SignalFire Din Mount Ranger Manual Rev 1SURULIAPPAN PREMKMARNo ratings yet
- PM1 IngDocument25 pagesPM1 IngAdam SchwemleinNo ratings yet
- MCU Infineon_XC222XL_DS_v01_02_EN-3168007Document110 pagesMCU Infineon_XC222XL_DS_v01_02_EN-3168007Hamza HammadiNo ratings yet
- AMC AnalogDrives InstallManualDocument73 pagesAMC AnalogDrives InstallManualharricitoNo ratings yet
- AC1 Inverter Operating HandbookDocument62 pagesAC1 Inverter Operating HandbookMarcos Gregorio da SilvaNo ratings yet
- PM660_datasheetDocument43 pagesPM660_datasheetRenato Luiz TécnicoNo ratings yet
- MAXQ617 Infrared Remote Control System-on-Chip: General Description FeaturesDocument29 pagesMAXQ617 Infrared Remote Control System-on-Chip: General Description FeaturesAbility JoshuaNo ratings yet
- AMC AnalogDrives InstallManualDocument72 pagesAMC AnalogDrives InstallManualRamsés RamírezNo ratings yet
- l6470 ManualDocument67 pagesl6470 ManualMiguel GuzmanNo ratings yet
- Iis 2 MDCDocument40 pagesIis 2 MDCAdrian Reyes GalavizNo ratings yet
- User Manual Product Description ORION Controller: Concentrate On What Is Most Important For You - Your BusinessDocument38 pagesUser Manual Product Description ORION Controller: Concentrate On What Is Most Important For You - Your Businessmoumen BoughraraNo ratings yet
- BST100 E11E01 E21Ration Belt Weighfeeder Weighing Controller ManualV3.6 B5Document61 pagesBST100 E11E01 E21Ration Belt Weighfeeder Weighing Controller ManualV3.6 B5Mubashar AwaisNo ratings yet
- OP - UKK .MLE .MPS .TR .21.rev .3.11Document17 pagesOP - UKK .MLE .MPS .TR .21.rev .3.11Mario Lizano janampaNo ratings yet
- Fully Integrated Microstepping Motor Driver With Motion Engine and SPIDocument73 pagesFully Integrated Microstepping Motor Driver With Motion Engine and SPIfreddys merchanNo ratings yet
- Infineon TC1762 DS v01 - 00 en PDFDocument114 pagesInfineon TC1762 DS v01 - 00 en PDFNima BeheshtiNo ratings yet
- ML0001 MultiComm RTHDocument48 pagesML0001 MultiComm RTHUrsula JohnsonNo ratings yet
- Infineon-Motor Control Shield With IFX007T For Arduino-UserManual-V02 00-EnDocument15 pagesInfineon-Motor Control Shield With IFX007T For Arduino-UserManual-V02 00-EnMR. VAIBHAVSINGH VARMANo ratings yet
- Basler Ace GigE Users ManualDocument360 pagesBasler Ace GigE Users ManualAyan Ghosh100% (1)
- SPM33 User ManualDocument78 pagesSPM33 User ManualjesankingNo ratings yet
- Programmatore Digitale Digital Programmed / Programmeur Digital / DigitalprogrammerDocument19 pagesProgrammatore Digitale Digital Programmed / Programmeur Digital / DigitalprogrammerSting EyesNo ratings yet
- K20P64M50SF0Document62 pagesK20P64M50SF0Drew AlbaneseNo ratings yet
- ZAPI COMBI SEM-1 Controller ManualDocument30 pagesZAPI COMBI SEM-1 Controller ManualKaique MelloNo ratings yet
- Stcomet: Smart Meter and Powerline Communication System-On-ChipDocument67 pagesStcomet: Smart Meter and Powerline Communication System-On-Chipengamin_sNo ratings yet
- YAKO MS-S3 User Manual-V2.1-190604Document26 pagesYAKO MS-S3 User Manual-V2.1-190604dominant cncNo ratings yet
- SMY - 133 Manual v2.0 EngDocument41 pagesSMY - 133 Manual v2.0 EngDmitNo ratings yet
- STPM01: Programmable Single Phase Energy Metering IC With Tamper DetectionDocument60 pagesSTPM01: Programmable Single Phase Energy Metering IC With Tamper Detectionankur rathiNo ratings yet
- I C Precision Altimeter: MPL3115A2Document44 pagesI C Precision Altimeter: MPL3115A2LuisNo ratings yet
- Trane Home Standby SmartGen Operation GuideDocument32 pagesTrane Home Standby SmartGen Operation GuideJamal RashidNo ratings yet
- lm80 nt441 15 - CDocument103 pageslm80 nt441 15 - CAdhiezzz GamingNo ratings yet
- MCU TestDocument49 pagesMCU Testasc eerNo ratings yet
- Practical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsFrom EverandPractical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsRating: 5 out of 5 stars5/5 (6)
- For Solid Fuel Heating Systems: Fans and BlowersDocument100 pagesFor Solid Fuel Heating Systems: Fans and BlowersAsistencia Técnica JLFNo ratings yet
- PolycarbonateDocument1 pagePolycarbonateAsistencia Técnica JLFNo ratings yet
- Key Features Alternative DesignationsDocument1 pageKey Features Alternative DesignationsAsistencia Técnica JLFNo ratings yet
- Key Features Alternative DesignationsDocument1 pageKey Features Alternative DesignationsAsistencia Técnica JLFNo ratings yet
- AcrylicDocument1 pageAcrylicAsistencia Técnica JLFNo ratings yet
- Safety Data Sheet For ACDC Compact Fans and Drive Systems - enDocument2 pagesSafety Data Sheet For ACDC Compact Fans and Drive Systems - enAsistencia Técnica JLFNo ratings yet
- 48-Pulse Diode Rectifier Method Reduces HarmonicsDocument7 pages48-Pulse Diode Rectifier Method Reduces HarmonicsAsistencia Técnica JLFNo ratings yet
- Reflective Wave Phenomena Defined Design Considerations For VFD Applications-2Document4 pagesReflective Wave Phenomena Defined Design Considerations For VFD Applications-2Asistencia Técnica JLFNo ratings yet
- Propag EFT2 1990Document10 pagesPropag EFT2 1990Asistencia Técnica JLFNo ratings yet
- Altech E StopsDocument2 pagesAltech E StopsAsistencia Técnica JLFNo ratings yet
- Snoa 748 CDocument20 pagesSnoa 748 CAsistencia Técnica JLFNo ratings yet
- A Novel Design of The Roots BlowerDocument13 pagesA Novel Design of The Roots BlowerAsistencia Técnica JLFNo ratings yet
- Space Engineering: Thermal Design Handbook - Part 11: Electrical HeatingDocument48 pagesSpace Engineering: Thermal Design Handbook - Part 11: Electrical HeatingAsistencia Técnica JLFNo ratings yet
- Space Engineering: Thermal Design Handbook - Part 12: LouversDocument106 pagesSpace Engineering: Thermal Design Handbook - Part 12: LouversAsistencia Técnica JLFNo ratings yet
- Space Engineering: Thermal Design Handbook - Part 5: Structural Materials: Metallic and CompositeDocument398 pagesSpace Engineering: Thermal Design Handbook - Part 5: Structural Materials: Metallic and CompositeAsistencia Técnica JLFNo ratings yet
- Space Engineering: Thermal Design Handbook - Part 8: Heat PipesDocument151 pagesSpace Engineering: Thermal Design Handbook - Part 8: Heat PipesAsistencia Técnica JLFNo ratings yet
- Space Engineering: Thermal Design Handbook - Part 4: Conductive Heat TransferDocument156 pagesSpace Engineering: Thermal Design Handbook - Part 4: Conductive Heat TransferAsistencia Técnica JLFNo ratings yet
- TIP Demos Final ColorDocument39 pagesTIP Demos Final ColorAsistencia Técnica JLFNo ratings yet
- WEG WEMOB Brochure 50118441 enDocument15 pagesWEG WEMOB Brochure 50118441 enAsistencia Técnica JLFNo ratings yet
- Electronics 12 00056Document24 pagesElectronics 12 00056Asistencia Técnica JLFNo ratings yet
- Power-integrity-eGuide Misc en 3608-6531-92 v0200Document44 pagesPower-integrity-eGuide Misc en 3608-6531-92 v0200Asistencia Técnica JLFNo ratings yet
- Stepping Motor EncoderDocument32 pagesStepping Motor EncoderAsistencia Técnica JLFNo ratings yet
- Optocouplers isolate modem data access arrangementsDocument7 pagesOptocouplers isolate modem data access arrangementsAsistencia Técnica JLFNo ratings yet
- Condition Monitoring of Rotating Ma PDFDocument11 pagesCondition Monitoring of Rotating Ma PDFAsistencia Técnica JLFNo ratings yet
- Resistors 101 VishayDocument8 pagesResistors 101 VishayAsistencia Técnica JLFNo ratings yet
- Rugged Thermal Imagers with Excellent PerformanceDocument1 pageRugged Thermal Imagers with Excellent PerformanceAsistencia Técnica JLFNo ratings yet
- Antique Radio Forums - View Topic - Tektronix 2235 Scope Power Supply ProblemDocument4 pagesAntique Radio Forums - View Topic - Tektronix 2235 Scope Power Supply ProblemAsistencia Técnica JLFNo ratings yet
- Rugged Thermal Imagers with Excellent PerformanceDocument1 pageRugged Thermal Imagers with Excellent PerformanceAsistencia Técnica JLFNo ratings yet
- Review of Owon B35TDocument15 pagesReview of Owon B35TAsistencia Técnica JLFNo ratings yet
- Recapping Tektronix 2235 PSU - Badcaps ForumsDocument5 pagesRecapping Tektronix 2235 PSU - Badcaps ForumsAsistencia Técnica JLFNo ratings yet
- Variety of Living Organisms WorksheetDocument7 pagesVariety of Living Organisms WorksheetSenuNo ratings yet
- Xpand!2 - User Guide - V1.1Document18 pagesXpand!2 - User Guide - V1.1JamesNo ratings yet
- Spru I 11444Document24 pagesSpru I 11444aalvarcaNo ratings yet
- 1 National Workshop For Sustainable Built Environment South - South PartnershipDocument14 pages1 National Workshop For Sustainable Built Environment South - South PartnershipRajendra KunwarNo ratings yet
- Cosmos Carl SaganDocument18 pagesCosmos Carl SaganRabia AbdullahNo ratings yet
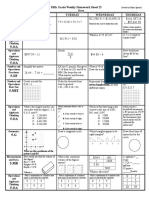
- 3 6 17weekly Homework Sheet Week 23 - 5th Grade - CcssDocument3 pages3 6 17weekly Homework Sheet Week 23 - 5th Grade - Ccssapi-328344919No ratings yet
- Intelligent PiggingDocument0 pagesIntelligent PiggingSam RajNo ratings yet
- 5 - Architect Fee AgreementDocument4 pages5 - Architect Fee AgreementJoevince Neil Gacus100% (2)
- R7 Injection CheatSheet.v1Document1 pageR7 Injection CheatSheet.v1qweNo ratings yet
- QP 7721-Sobha-B+g+8-2town-Pahse IiDocument2 pagesQP 7721-Sobha-B+g+8-2town-Pahse IirajatNo ratings yet
- Günter Fella: Head of Purchasing AutomotiveDocument2 pagesGünter Fella: Head of Purchasing AutomotiveHeart Touching VideosNo ratings yet
- Telstra Strategic Issues and CEO Leadership Briefing PaperDocument16 pagesTelstra Strategic Issues and CEO Leadership Briefing PaperIsabel Woods100% (1)
- K220 Accessories BrochureDocument6 pagesK220 Accessories Brochurehh8g9y6ggcNo ratings yet
- Analyzing an Anti-Smoking Poster Using a Formalist ApproachDocument20 pagesAnalyzing an Anti-Smoking Poster Using a Formalist ApproachAlphred Jann NaparanNo ratings yet
- Sophiajurgens Resume EdtDocument2 pagesSophiajurgens Resume Edtapi-506489381No ratings yet
- Surveying - Mcqs On Unit I - SJMDocument6 pagesSurveying - Mcqs On Unit I - SJMKalyani ingole100% (1)
- Cesp 105 - Foundation Engineering and Retaining Wall Design Lesson 11. Structural Design of Spread FootingDocument7 pagesCesp 105 - Foundation Engineering and Retaining Wall Design Lesson 11. Structural Design of Spread FootingJadeNo ratings yet
- CSR of DABUR Company..Document7 pagesCSR of DABUR Company..Rupesh kumar mishraNo ratings yet
- Jenny Randles - Mind Monsters - Invaders From Inner Space (1990)Document219 pagesJenny Randles - Mind Monsters - Invaders From Inner Space (1990)DirkTheDaring11100% (15)
- CPC-COM-SU-4743-G External CoatingsDocument24 pagesCPC-COM-SU-4743-G External Coatingsaslam.amb100% (1)
- Perceptron: Tirtharaj DashDocument22 pagesPerceptron: Tirtharaj DashKishan Kumar GuptaNo ratings yet
- Adaboost With Totally Corrective Updates For Fast Face DetectionDocument6 pagesAdaboost With Totally Corrective Updates For Fast Face DetectionNguyen Quoc TrieuNo ratings yet
- Final Portfolio Cover LetterDocument2 pagesFinal Portfolio Cover Letterapi-321017157No ratings yet
- Oc Curve BasicsDocument25 pagesOc Curve BasicsRohit SoniNo ratings yet
- Piperack Design PhiloshipyDocument10 pagesPiperack Design PhiloshipyGautam PaulNo ratings yet
- Experiences in The OperationDocument7 pagesExperiences in The OperationUsama Bin SabirNo ratings yet
- Proportional Valves: Adjustment ProcedureDocument11 pagesProportional Valves: Adjustment Procedureyaniprasetyo12No ratings yet
- BID 2021 046 6913 VendorList3. (237110)Document1 pageBID 2021 046 6913 VendorList3. (237110)JAGUAR GAMINGNo ratings yet
- Creative Commons Attribution-Noncommercial-Share Alike 3.0 LicenseDocument4 pagesCreative Commons Attribution-Noncommercial-Share Alike 3.0 LicenseAnindito W WicaksonoNo ratings yet
- CSA09 Programming in Java MediumDocument25 pagesCSA09 Programming in Java Mediumsometimesop7934No ratings yet