You might also like
- ZAPI AC-0 ManualDocument62 pagesZAPI AC-0 ManualRizki Febri67% (3)
- Adtzp0bb (AC1-ing)Document62 pagesAdtzp0bb (AC1-ing)mirko coppiniNo ratings yet
- ZAPI AC-1 ManualDocument62 pagesZAPI AC-1 ManualMarcos Gregorio da SilvaNo ratings yet
- MS-S3 User ManualDocument9 pagesMS-S3 User ManualParthiv DharaNo ratings yet
- Ad3na0ab (COMBI NACCO-ing)Document30 pagesAd3na0ab (COMBI NACCO-ing)Kaique MelloNo ratings yet
- MS-L3 Servo-Stepper Drive User ManualDocument12 pagesMS-L3 Servo-Stepper Drive User ManualAsistencia Técnica JLFNo ratings yet
- MS-L3P-L4P Servo-Stepper DriverDocument9 pagesMS-L3P-L4P Servo-Stepper DriverAsistencia Técnica JLFNo ratings yet
- GENKINGER englHBSEM1Document38 pagesGENKINGER englHBSEM1kashif AliNo ratings yet
- Ad3zp0ac (COMBISEM1-ing)Document29 pagesAd3zp0ac (COMBISEM1-ing)Kaique MelloNo ratings yet
- Controller HAT600NBDocument24 pagesController HAT600NBOrlando David Zeña SandovalNo ratings yet
- 550172c (MX-ing)Document20 pages550172c (MX-ing)Ricardo Gamez OrtegaNo ratings yet
- Combi Sem 1 Ing (Ad3zp0aa)Document29 pagesCombi Sem 1 Ing (Ad3zp0aa)Russell WoodNo ratings yet
- SPM33 User ManualDocument78 pagesSPM33 User ManualjesankingNo ratings yet
- Ascon ManualDocument76 pagesAscon ManualZulfiqar AhmedNo ratings yet
- IEG SAMIO-LV Distribution Substation Monitoring SystemDocument33 pagesIEG SAMIO-LV Distribution Substation Monitoring Systemnicolas.tohme121No ratings yet
- Infineon TLF30682QVS01 DataSheet v01 - 01 ENDocument97 pagesInfineon TLF30682QVS01 DataSheet v01 - 01 ENSergei OssifNo ratings yet
- ZAPI AC-1 ManualDocument62 pagesZAPI AC-1 ManualRicardo Gamez OrtegaNo ratings yet
- Manual AD 4401Document90 pagesManual AD 4401FELIPAO59No ratings yet
- Novus N1500LC InglesDocument14 pagesNovus N1500LC InglesSergio FumagalliNo ratings yet
- ZAPI AC-0 Manual Carretillas EPDocument62 pagesZAPI AC-0 Manual Carretillas EPRicardo Gamez Ortega50% (2)
- ABB Component Drives ABB General Machinery Drives ABB Decentralized DrivesDocument28 pagesABB Component Drives ABB General Machinery Drives ABB Decentralized DrivesTibisay GonzalezNo ratings yet
- H1DN IngDocument35 pagesH1DN IngAdam SchwemleinNo ratings yet
- Manual SEM2 (Ing)Document37 pagesManual SEM2 (Ing)Russell WoodNo ratings yet
- Poste A Souder Saf Prestotig 180 220 ForceDocument84 pagesPoste A Souder Saf Prestotig 180 220 Forcexav7781No ratings yet
- LM 2676Document41 pagesLM 2676BhethhoNo ratings yet
- Lm2676 Simple Switcher High Efficiency 3-A Step-Down Voltage RegulatorDocument39 pagesLm2676 Simple Switcher High Efficiency 3-A Step-Down Voltage RegulatorManutenção eletrônicaNo ratings yet
- Lm2676 Simple Switcher High Efficiency 3-A Step-Down Voltage RegulatorDocument40 pagesLm2676 Simple Switcher High Efficiency 3-A Step-Down Voltage RegulatorChristian Tubay MaciasNo ratings yet
- Washing MachineDocument13 pagesWashing MachineBagsFNo ratings yet
- Monarch Nice 1000 ManualDocument177 pagesMonarch Nice 1000 Manualleonardo jimenezNo ratings yet
- Lm2678 Simple Switcher High Efficiency 5-A Step-Down Voltage RegulatorDocument38 pagesLm2678 Simple Switcher High Efficiency 5-A Step-Down Voltage RegulatorGilvan JuniorNo ratings yet
- Infineon IMC100 DataSheet v01 06 enDocument54 pagesInfineon IMC100 DataSheet v01 06 enHATEM68No ratings yet
- KM-30S User Manual.V122.enDocument16 pagesKM-30S User Manual.V122.enfarzin100% (2)
- StatcomDocument16 pagesStatcomksg9731100% (1)
- H0 ManualDocument51 pagesH0 ManualRicardo Gamez OrtegaNo ratings yet
- User Manual: HAT560N Series (HAT560N/HAT560NB) Ats ControllerDocument29 pagesUser Manual: HAT560N Series (HAT560N/HAT560NB) Ats ControllercarderinNo ratings yet
- lm53625 q1 PDFDocument56 pageslm53625 q1 PDFPrabhansh PandeyNo ratings yet
- Zapi Sem-2 ManualDocument38 pagesZapi Sem-2 ManualSamy ElmiligyNo ratings yet
- Automatic Mains Failure Unit TRANS-AMF - ENG - MAN - V57Document84 pagesAutomatic Mains Failure Unit TRANS-AMF - ENG - MAN - V57tazzamal abbasNo ratings yet
- Universal Motor Control Evaluation Board: User ManualDocument14 pagesUniversal Motor Control Evaluation Board: User ManualEazhil PreethiNo ratings yet
- BRUSH Technical SectionDocument57 pagesBRUSH Technical Section3319826No ratings yet
- Trane Home Standby SmartGen Operation GuideDocument32 pagesTrane Home Standby SmartGen Operation GuideJamal RashidNo ratings yet
- Excell Precision FM Manual de UsuarioDocument36 pagesExcell Precision FM Manual de UsuarioCarlos Ignacio Torres MansillaNo ratings yet
- Aclcw0aa (SEM-ZERO CROWN-ing)Document38 pagesAclcw0aa (SEM-ZERO CROWN-ing)TALLERNo ratings yet
- YS-K01 Door Drive ManualDocument46 pagesYS-K01 Door Drive ManualMuhammad Rashid100% (6)
- Infineon BTS50025 1TEA DS V01 - 00 EN DataSheet v01 - 00 EN PDFDocument44 pagesInfineon BTS50025 1TEA DS V01 - 00 EN DataSheet v01 - 00 EN PDFAgustinNo ratings yet
- Axor Drive Service ManualDocument68 pagesAxor Drive Service Manualkratmel100% (2)
- Operator & Service Manual: A.T.S. 2000 Tourniquet SystemDocument32 pagesOperator & Service Manual: A.T.S. 2000 Tourniquet SystemJordan BonnettNo ratings yet
- 550114b (H1DN-ing)Document35 pages550114b (H1DN-ing)Vladimir KrivenokNo ratings yet
- XDPL8105 - Digital Flyback Controller IC: About This DocumentDocument33 pagesXDPL8105 - Digital Flyback Controller IC: About This Documentzuffflor_925748656No ratings yet
- Zapi Sem-X ManualDocument40 pagesZapi Sem-X ManualRicardo Gamez Ortega75% (4)
- MS-N - Technical Catalogue PDFDocument44 pagesMS-N - Technical Catalogue PDFRandy Yoan EksaktaNo ratings yet
- SR Eco VSD and SRH Models With Touchscreen ManualDocument45 pagesSR Eco VSD and SRH Models With Touchscreen ManualBlank Face100% (1)
- b70 2040Document41 pagesb70 2040haddanNo ratings yet
- LXC61X0E Series Genset ControllerDocument36 pagesLXC61X0E Series Genset ControllerGeneral Projects and Electric, C.A GEPECANo ratings yet
- Vicor Power Supply ManualDocument182 pagesVicor Power Supply ManualwogratNo ratings yet
- MC200 Saur DanfossDocument21 pagesMC200 Saur Danfosstravieso112No ratings yet
- Service Manual PDFDocument44 pagesService Manual PDFkhawar mukhtarNo ratings yet
- Commander SK - Control TechniquesDocument81 pagesCommander SK - Control TechniquesLeo Dos RamosNo ratings yet
- Compressor ADU Operator Panel OP320-SDocument86 pagesCompressor ADU Operator Panel OP320-Sm s sankar raoNo ratings yet
- STM 6720Document30 pagesSTM 6720Mohamed AshrafNo ratings yet
- General Electric SX MB1 TECH (Ingles 09-2004) PDFDocument77 pagesGeneral Electric SX MB1 TECH (Ingles 09-2004) PDFJuan Carlos Rubio FrescoNo ratings yet
- Nup2105l DDocument8 pagesNup2105l DjpserafiniNo ratings yet
- M MA AN NU UA AL L: Digital InstrumentationDocument12 pagesM MA AN NU UA AL L: Digital InstrumentationAdam SchwemleinNo ratings yet
- STB140NF75Document18 pagesSTB140NF75quemasda quiensoyNo ratings yet
- sth315n10f7 2Document17 pagessth315n10f7 2Adam SchwemleinNo ratings yet
- DatasheetDocument160 pagesDatasheetsamsularief03No ratings yet
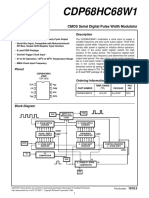
- CDP68HC68W1: CMOS Serial Digital Pulse Width ModulatorDocument9 pagesCDP68HC68W1: CMOS Serial Digital Pulse Width ModulatorЕвгенийNo ratings yet
- GA1B IngDocument24 pagesGA1B IngAdam SchwemleinNo ratings yet
- Ace2 Inverter: User ManualDocument85 pagesAce2 Inverter: User ManualAdam Schwemlein100% (1)
- 74HC02 PDFDocument5 pages74HC02 PDFcsoto1234No ratings yet
- Repair Manual - 7590353-040 - EN PDFDocument690 pagesRepair Manual - 7590353-040 - EN PDFIvan Esguevillas86% (7)
- H1DN IngDocument35 pagesH1DN IngAdam SchwemleinNo ratings yet
- Service Manual Liftstar-2014Document46 pagesService Manual Liftstar-2014Adam SchwemleinNo ratings yet
- P4fl3.3a Au - Series 1866315Document7 pagesP4fl3.3a Au - Series 1866315Adam SchwemleinNo ratings yet
- Ace2 Inverter: User ManualDocument85 pagesAce2 Inverter: User ManualAdam Schwemlein100% (1)
- Service Manual Liftstar-2014Document46 pagesService Manual Liftstar-2014Adam SchwemleinNo ratings yet
- Service Manual Liftstar-2014Document46 pagesService Manual Liftstar-2014Adam SchwemleinNo ratings yet
- 2SK3569Document6 pages2SK3569João Paulo GiacomelloNo ratings yet
- STB140NF75Document18 pagesSTB140NF75quemasda quiensoyNo ratings yet
- LM339, LM239, LM139, LM2901 Quad Differential Comparators: 1 Features 3 DescriptionDocument33 pagesLM339, LM239, LM139, LM2901 Quad Differential Comparators: 1 Features 3 DescriptionAlex KarimNo ratings yet
- Semiconductor KIA393P/S/F/FK: Technical DataDocument4 pagesSemiconductor KIA393P/S/F/FK: Technical DataAdam SchwemleinNo ratings yet
- LMV 932 NationalDocument19 pagesLMV 932 NationalAdam SchwemleinNo ratings yet
- Switching Regulator Applications: Absolute Maximum RatingsDocument6 pagesSwitching Regulator Applications: Absolute Maximum RatingsAdam SchwemleinNo ratings yet
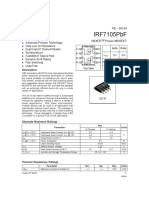
- Infineon IRF7105 DataSheet v01 01 En-1228160Document12 pagesInfineon IRF7105 DataSheet v01 01 En-1228160Adam SchwemleinNo ratings yet
- Irf2807 International DatasheetDocument8 pagesIrf2807 International DatasheetAdam SchwemleinNo ratings yet
- Ir 2112Document18 pagesIr 2112Valeriu DumitracheNo ratings yet
- Irfb3306Gpbf: V 60V R Typ. 3.3M Max. 4.2M I 160A C I 120ADocument8 pagesIrfb3306Gpbf: V 60V R Typ. 3.3M Max. 4.2M I 160A C I 120AMarivaldo patricioNo ratings yet
- Ir 2127Document16 pagesIr 2127kimonspNo ratings yet
- Fermator Landing Door LD30 Maintenance Manual Premium - 09.18Document60 pagesFermator Landing Door LD30 Maintenance Manual Premium - 09.18alfreliaNo ratings yet
- ACL TOP 500 Service Manual Rev 01Document764 pagesACL TOP 500 Service Manual Rev 01suny8781No ratings yet
- VEHICULOSDocument6 pagesVEHICULOSALVARO CERDA CRUCESNo ratings yet
- MParts 1055Document212 pagesMParts 1055Andres Sanchez100% (1)
- U Channel 2019Document18 pagesU Channel 2019aNo ratings yet
- Imran f1122 Lab 4Document7 pagesImran f1122 Lab 4BM4-0620 Ibrahim Bin YusriNo ratings yet
- XA XA: P&Id Area 36 - Grinding SystemDocument1 pageXA XA: P&Id Area 36 - Grinding SystemGoulet KostNo ratings yet
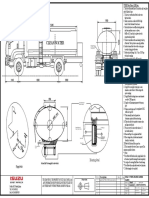
- FVR90L WATER TANKER MAAIF-ModelDocument1 pageFVR90L WATER TANKER MAAIF-ModelAvi AtoNo ratings yet
- 78d33 DatasheetDocument4 pages78d33 DatasheetJorge AdrianNo ratings yet
- Hydraulic Puller Kit TMHC 110E: ApplicationDocument2 pagesHydraulic Puller Kit TMHC 110E: Applicationsbosch54No ratings yet
- AP9MK3 Rev-H ManualDocument202 pagesAP9MK3 Rev-H ManualRyan PacamarraNo ratings yet
- FR-A800 Plus For Roll To RollDocument40 pagesFR-A800 Plus For Roll To RollCORTOCIRCUITANTENo ratings yet
- Transformers Ideal: Dr. Walid A. M. GhoneimDocument20 pagesTransformers Ideal: Dr. Walid A. M. Ghoneimwalidghoneim1970No ratings yet
- AUG 05 Automotive EnginesDocument16 pagesAUG 05 Automotive EnginesHarishNo ratings yet
- Service Manual PDFDocument428 pagesService Manual PDFAprajita Kayastha100% (2)
- RF Final Project PDFDocument18 pagesRF Final Project PDFbelay workyeNo ratings yet
- TUTORIAL-5 - SHAFT DESIGN With SolutionDocument30 pagesTUTORIAL-5 - SHAFT DESIGN With SolutionAhmad AL-BukharyNo ratings yet
- JohorBharu Lista Jul11 PDFDocument11 pagesJohorBharu Lista Jul11 PDFJayson TeeNo ratings yet
- Mir250 User Guide 1.4 - enDocument224 pagesMir250 User Guide 1.4 - envictor.ciudad.carpelNo ratings yet
- PIC16F18855 ModDocument662 pagesPIC16F18855 Modwhynot05No ratings yet
- ZT-2800 /ZT-3100 /ZT-3200™/ZT-3400 Integrated Zero-Turn Transaxle Service and Repair ManualDocument52 pagesZT-2800 /ZT-3100 /ZT-3200™/ZT-3400 Integrated Zero-Turn Transaxle Service and Repair ManualDenice PekelNo ratings yet
- Materiales IntegracionDocument18 pagesMateriales IntegracionEzequiel BrionesNo ratings yet
- Information Systems 363 Stair Chapter 3 11th EditionDocument55 pagesInformation Systems 363 Stair Chapter 3 11th EditionVictoria NguyenNo ratings yet
- Sony Kdl-22ex550 Ex553 Ex555 Kdl-26ex550 Ex553 Ex555 Kdl-32ex650 Ex653 Ex655 Chassis Az3f P-2a PDFDocument112 pagesSony Kdl-22ex550 Ex553 Ex555 Kdl-26ex550 Ex553 Ex555 Kdl-32ex650 Ex653 Ex655 Chassis Az3f P-2a PDFshafiuddin7326100% (1)
- Ather Specifications SheetDocument2 pagesAther Specifications SheetKarthikeyan VenkatesanNo ratings yet
- Yamaha RXV 350 Owners ManualDocument62 pagesYamaha RXV 350 Owners Manualbarber1No ratings yet
- AER BAER CatalogDocument20 pagesAER BAER Catalogadis.machadoNo ratings yet
- Edc Unit 4Document26 pagesEdc Unit 4raghulNo ratings yet
- Cookworks Mini OvenDocument9 pagesCookworks Mini Ovensum0n3No ratings yet
- WS 1020Document44 pagesWS 1020Sunil Sree NathNo ratings yet
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (9)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosFrom EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosRating: 5 out of 5 stars5/5 (1)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- Analog Design and Simulation Using OrCAD Capture and PSpiceFrom EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNo ratings yet
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Heat Transfer Engineering: Fundamentals and TechniquesFrom EverandHeat Transfer Engineering: Fundamentals and TechniquesRating: 4 out of 5 stars4/5 (1)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)