You might also like
- Danial ReportDocument11 pagesDanial ReportImran AliNo ratings yet
- Activity 05Document17 pagesActivity 05Joshua AbadNo ratings yet
- Introduction To PIDDocument16 pagesIntroduction To PIDjocianvefNo ratings yet
- Introduction: PID Controller DesignDocument23 pagesIntroduction: PID Controller DesignRahul DubeyNo ratings yet
- Lab 6 LCS 078Document13 pagesLab 6 LCS 078Asad saeedNo ratings yet
- Introduction: PID Controller Design: TF Step Pid Feedback Pidtool PidtuneDocument17 pagesIntroduction: PID Controller Design: TF Step Pid Feedback Pidtool PidtuneeduardoguidoNo ratings yet
- Tci Practica 8Document17 pagesTci Practica 8Iván Méndez FloresNo ratings yet
- IntroductionDocument51 pagesIntroductionAlex NegulescuNo ratings yet
- PID LabVIEWDocument6 pagesPID LabVIEWalvarado02No ratings yet
- PID Controller DesignDocument14 pagesPID Controller DesignWashington Luiz Leite SousaNo ratings yet
- PID ControlDocument12 pagesPID ControlpsreedheranNo ratings yet
- Lab2 UpdatedDocument5 pagesLab2 UpdatedSekar PrasetyaNo ratings yet
- Pid Control ExperimentDocument15 pagesPid Control Experimentazhar3303No ratings yet
- PID Control: Modeling Controls Tutorials Menu Root LocusDocument9 pagesPID Control: Modeling Controls Tutorials Menu Root LocusXavier Freire ZamoraNo ratings yet
- CTM - PID TutorialDocument9 pagesCTM - PID TutorialStanley CesarNo ratings yet
- Lab 09 PDFDocument8 pagesLab 09 PDFAbdul Rehman AfzalNo ratings yet
- Lab Experiment # 05: ObjectiveDocument7 pagesLab Experiment # 05: ObjectiveMuhammad Samee baigNo ratings yet
- Lab #2: PI Controller Design and Second Order SystemsDocument4 pagesLab #2: PI Controller Design and Second Order SystemssamielmadssiaNo ratings yet
- Generalidades PIDDocument3 pagesGeneralidades PIDJeferson GonzálezNo ratings yet
- EE 340: Control Systems: Lab 5 P, PI and PID ControllersDocument11 pagesEE 340: Control Systems: Lab 5 P, PI and PID ControllersMuhammad AbbasiNo ratings yet
- Experiment 4Document13 pagesExperiment 4Usama NadeemNo ratings yet
- NI Tutorial 6440Document7 pagesNI Tutorial 6440mahi9892No ratings yet
- Lab 05Document5 pagesLab 05MUHAMMAD ARSLANNo ratings yet
- Multiloop Control SystemDocument4 pagesMultiloop Control SystemAkash SahaNo ratings yet
- PID and Refinery TutorialDocument20 pagesPID and Refinery TutorialSatpal SinghNo ratings yet
- ReportDocument15 pagesReportsaad hussainNo ratings yet
- PIDDocument8 pagesPIDmwbmughalNo ratings yet
- Cycle1 ManualDocument24 pagesCycle1 ManualSanthosh krishna. UNo ratings yet
- 1 Simulink For Process ControlDocument10 pages1 Simulink For Process Controlehsilv005No ratings yet
- PID Tutorial: Step Cloop RedDocument8 pagesPID Tutorial: Step Cloop RedTran SangNo ratings yet
- Activity 2Document7 pagesActivity 2Abderraouf HARCHENo ratings yet
- Introduction: PID Controller Design: SystemDocument14 pagesIntroduction: PID Controller Design: SystemRantharu AttanayakeNo ratings yet
- Control Lab Experiment 2Document3 pagesControl Lab Experiment 2AnasElgaoodNo ratings yet
- Laboratory ManualDocument26 pagesLaboratory ManualahmadNo ratings yet
- Feedback and Control Systems: Activity No. 5 - Design of Cascade Compensators Using Root Locus Techniques: PID ControlDocument17 pagesFeedback and Control Systems: Activity No. 5 - Design of Cascade Compensators Using Root Locus Techniques: PID ControlYvesExequielPascuaNo ratings yet
- DC Motor Speed: Digital Controller Design: Eng Mohamed DobaDocument20 pagesDC Motor Speed: Digital Controller Design: Eng Mohamed DobaEng. Ibrahim Abdullah AlruhmiNo ratings yet
- EEE 402 Exp1Document5 pagesEEE 402 Exp1Sunil KumarNo ratings yet
- Simulink4Controlnew2008 1pageDocument12 pagesSimulink4Controlnew2008 1pageBambang Hidayat NoegrohoNo ratings yet
- 2.004 Dynamics and Control Ii: Mit OpencoursewareDocument7 pages2.004 Dynamics and Control Ii: Mit OpencoursewareVishay RainaNo ratings yet
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatNo ratings yet
- DCS Lab 8 Report (Zain, Umer, Abdullah)Document14 pagesDCS Lab 8 Report (Zain, Umer, Abdullah)Muhammad UmerNo ratings yet
- Lab 3 - 4 ScilabDocument8 pagesLab 3 - 4 ScilabIq'wan RodzaiNo ratings yet
- PID Tutorial: Step Cloop RedDocument8 pagesPID Tutorial: Step Cloop RedmohammedNo ratings yet
- Lcs Cep Presentation: Submittted byDocument15 pagesLcs Cep Presentation: Submittted byNasir AbdullahNo ratings yet
- Control system-II: Department of Electrical EngineeringDocument17 pagesControl system-II: Department of Electrical Engineeringpala abishayNo ratings yet
- Plant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorDocument39 pagesPlant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorMani Kumar ReddyNo ratings yet
- Clase Diseño Por Medio Del LGR Usando MatlabDocument42 pagesClase Diseño Por Medio Del LGR Usando MatlabJesus Tapia GallardoNo ratings yet
- Introduction: PID Controller Design: Sistemas de ControlDocument15 pagesIntroduction: PID Controller Design: Sistemas de ControlPatricio EncaladaNo ratings yet
- Soal Latihan UAS Sistem KontrolDocument1 pageSoal Latihan UAS Sistem KontrolDILAN LESNUSSANo ratings yet
- Higher National Diploma in Engineering: Assessment BriefDocument22 pagesHigher National Diploma in Engineering: Assessment BriefTân NguyễnNo ratings yet
- Lab 6Document3 pagesLab 6Vu LeNo ratings yet
- Frisnedi, Nadine T. ECE131L-A11 SeatworkDocument3 pagesFrisnedi, Nadine T. ECE131L-A11 SeatworknadaynNo ratings yet
- Lab # 9 Control SystemDocument10 pagesLab # 9 Control SystemZabeehullahmiakhailNo ratings yet
- Lab 05 CONTROL SYSTEMSDocument9 pagesLab 05 CONTROL SYSTEMSMUHAMMAD ARSLANNo ratings yet
- Control of An Unstable Inverted Pendulum SystemDocument11 pagesControl of An Unstable Inverted Pendulum SystemShivankyJaiswalNo ratings yet
- Experiment 03: Consider The Following Unity Feedback SystemDocument20 pagesExperiment 03: Consider The Following Unity Feedback SystemSomnath BiswalNo ratings yet
- CS LabReport 4Document13 pagesCS LabReport 4Muhammad AfzaalNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Labsheet Exp4Document6 pagesLabsheet Exp4REDWAN AHMED MIAZEENo ratings yet
- FDFDFDDocument8 pagesFDFDFDREDWAN AHMED MIAZEENo ratings yet
- Shortened PointsDocument4 pagesShortened PointsREDWAN AHMED MIAZEENo ratings yet
- Control System Labsheet Exp1Document9 pagesControl System Labsheet Exp1REDWAN AHMED MIAZEENo ratings yet
- Control System Labsheet Exp5Document5 pagesControl System Labsheet Exp5REDWAN AHMED MIAZEENo ratings yet
- Labsheet Exp2Document5 pagesLabsheet Exp2REDWAN AHMED MIAZEENo ratings yet
- Control System Labsheet Exp4Document8 pagesControl System Labsheet Exp4REDWAN AHMED MIAZEENo ratings yet
- CERT NO: MV/MC/CERT-41304/07/2020: Name of The Insured & AddressDocument1 pageCERT NO: MV/MC/CERT-41304/07/2020: Name of The Insured & AddressREDWAN AHMED MIAZEENo ratings yet
- Lec 10 HighlightsDocument6 pagesLec 10 HighlightsREDWAN AHMED MIAZEENo ratings yet
- Assignment 1: MAT216 - SUMMER 2020Document10 pagesAssignment 1: MAT216 - SUMMER 2020REDWAN AHMED MIAZEENo ratings yet
- Term Project 2: Must Be Submitted by The Due Date. 20% Deduction For Each Day Late. No ExceptionDocument3 pagesTerm Project 2: Must Be Submitted by The Due Date. 20% Deduction For Each Day Late. No ExceptionREDWAN AHMED MIAZEENo ratings yet
- Summer 2020 Mat 216 Solutions (Problem Sheet) : Ia Iia Iii ADocument12 pagesSummer 2020 Mat 216 Solutions (Problem Sheet) : Ia Iia Iii AREDWAN AHMED MIAZEENo ratings yet
- Summer 2020 MAT 216 Problem Sheet: Solve The Following ProblemsDocument3 pagesSummer 2020 MAT 216 Problem Sheet: Solve The Following ProblemsREDWAN AHMED MIAZEENo ratings yet
- Travel Crop Design: Energy Conversion-I EEE 221 Lecture-09Document12 pagesTravel Crop Design: Energy Conversion-I EEE 221 Lecture-09REDWAN AHMED MIAZEENo ratings yet
- Redwan Ahmed Miazee - HW - 2Document2 pagesRedwan Ahmed Miazee - HW - 2REDWAN AHMED MIAZEENo ratings yet
- Assignment 3: ECE209&EEE209 (Semiconductor Materials and Devices) Summer 2020Document1 pageAssignment 3: ECE209&EEE209 (Semiconductor Materials and Devices) Summer 2020REDWAN AHMED MIAZEENo ratings yet
- Term Project 2Document3 pagesTerm Project 2REDWAN AHMED MIAZEENo ratings yet
- Home Work - 3: EEE 207 / ECE 207: Electronic Devices and Circuits IIDocument3 pagesHome Work - 3: EEE 207 / ECE 207: Electronic Devices and Circuits IIREDWAN AHMED MIAZEENo ratings yet
- Chapter 5 Solutions PDFDocument41 pagesChapter 5 Solutions PDFREDWAN AHMED MIAZEENo ratings yet
- Redwan Ahmed Miazee - HW - 1Document3 pagesRedwan Ahmed Miazee - HW - 1REDWAN AHMED MIAZEENo ratings yet
- BRAC University: ECE230 & EEE209 (Semiconductor Materials and Devices) Summer 2020Document2 pagesBRAC University: ECE230 & EEE209 (Semiconductor Materials and Devices) Summer 2020REDWAN AHMED MIAZEENo ratings yet
- Assignment 1: BRAC University ECE230&EEE209 (Semiconductor Materials and Devices) Summer 2020Document1 pageAssignment 1: BRAC University ECE230&EEE209 (Semiconductor Materials and Devices) Summer 2020REDWAN AHMED MIAZEENo ratings yet
- AIAG FMEA Ranking TablesDocument3 pagesAIAG FMEA Ranking TableskrishnakumarNo ratings yet
- How To Bypass PIN and Password Locks in Android?: What Do I Need To Know?Document7 pagesHow To Bypass PIN and Password Locks in Android?: What Do I Need To Know?ahmadkamalNo ratings yet
- PBL ReportDocument41 pagesPBL ReportOm TanpureNo ratings yet
- Software Engineering - Ehrs: Draw Data Flow DiagramDocument8 pagesSoftware Engineering - Ehrs: Draw Data Flow DiagramManav MakwanaNo ratings yet
- Assignment 1 OMC 306Document2 pagesAssignment 1 OMC 306AyushNo ratings yet
- States Were Selected For Each: Arthur M. (Art) Dowell, III, PE Process Improvement InstituteDocument1 pageStates Were Selected For Each: Arthur M. (Art) Dowell, III, PE Process Improvement InstituteJinyoung ChoiNo ratings yet
- Introduction To CAM - Pdfud Abdul Majeed - 1 - Introduction To CAMDocument12 pagesIntroduction To CAM - Pdfud Abdul Majeed - 1 - Introduction To CAMKiranRao BiradarNo ratings yet
- Cat Electronic Technician 2020C v1.0 Product Status ReportDocument5 pagesCat Electronic Technician 2020C v1.0 Product Status ReportLimosh BsNo ratings yet
- 3.distributed Control SystemsDocument63 pages3.distributed Control SystemsPrasanth ChitturiNo ratings yet
- Analisis TPM Pada Mesin Press Fine Blanking 1100 Ton Dengan Metode OEE Di Perusahaan Manufacturing Press PartDocument6 pagesAnalisis TPM Pada Mesin Press Fine Blanking 1100 Ton Dengan Metode OEE Di Perusahaan Manufacturing Press PartAdiinNo ratings yet
- Cyber Safety PP Presentation For Class 11Document16 pagesCyber Safety PP Presentation For Class 11WAZ CHANNEL100% (1)
- IT-Glossary French - EnglishDocument56 pagesIT-Glossary French - EnglishGosia SielickaNo ratings yet
- Antonio Visioli, Qingchang Zhong - Control of Integral Processes With Dead TimeDocument270 pagesAntonio Visioli, Qingchang Zhong - Control of Integral Processes With Dead TimeAndreaNo ratings yet
- BIT 2321 Software Engineering IIDocument3 pagesBIT 2321 Software Engineering IIRennyNo ratings yet
- Siemens Training ProgramDocument20 pagesSiemens Training ProgramChalla Venu Kumar Reddy100% (1)
- FF Versus Hart ComparisonDocument3 pagesFF Versus Hart ComparisonAnil NairNo ratings yet
- CO1508 Practical 10 Instructor NotesDocument2 pagesCO1508 Practical 10 Instructor NotesEdward LeeNo ratings yet
- Cloud Computing PrelimDocument41 pagesCloud Computing PrelimCanatoy, Christian G.No ratings yet
- Act 1 Review of CPP ProgrammingDocument6 pagesAct 1 Review of CPP ProgrammingCassie CutieNo ratings yet
- Experion CEE-based Controllers and I/O: Doc EP03-290-400Document43 pagesExperion CEE-based Controllers and I/O: Doc EP03-290-400MesratNo ratings yet
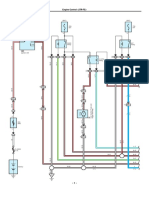
- Engine ControlDocument13 pagesEngine Controlmarquin84No ratings yet
- Autosar Sws SomeiptransformerDocument106 pagesAutosar Sws SomeiptransformerStefan RuscanuNo ratings yet
- Introduction To Problem Solving and Programming Course Code: CSE 1021Document96 pagesIntroduction To Problem Solving and Programming Course Code: CSE 1021Samridhi JaiswalNo ratings yet
- 303-01 - 2.3L EcoBoost - Disassembly - EngineDocument88 pages303-01 - 2.3L EcoBoost - Disassembly - EngineCARLOS LIMADANo ratings yet
- VBA Objects The Ultimate GuideDocument29 pagesVBA Objects The Ultimate GuideAlina StanciuNo ratings yet
- Perkins 20 Kva (404D-22G)Document2 pagesPerkins 20 Kva (404D-22G)RavaelNo ratings yet
- Maribel Fernández (Auth.) - Programming Languages and Operational Semantics - A Concise Overview-Springer-Verlag London (2014) PDFDocument211 pagesMaribel Fernández (Auth.) - Programming Languages and Operational Semantics - A Concise Overview-Springer-Verlag London (2014) PDFWagner Oliveira Jr.100% (5)
- rqvwuxfwlrq, Qgxvwuldo Dqg3HwurohxppowerDocument19 pagesrqvwuxfwlrq, Qgxvwuldo Dqg3Hwurohxppower李春杰No ratings yet
- BT323 Chp1Document18 pagesBT323 Chp1RachelleNo ratings yet
- QSandS NTUA SAP MethodologyDocument25 pagesQSandS NTUA SAP Methodologyel_angel_5000No ratings yet