You might also like
- CIE 1 Portions FEM - HKRV - BMSCE 21022020 PDFDocument70 pagesCIE 1 Portions FEM - HKRV - BMSCE 21022020 PDFYakajNo ratings yet
- Two-Dimensional Problem Solution: y X X yDocument55 pagesTwo-Dimensional Problem Solution: y X X yRAMKUMARNo ratings yet
- 228 002 PDFDocument7 pages228 002 PDFnegar khakshurNo ratings yet
- 228 002 PDFDocument7 pages228 002 PDFnegar khakshurNo ratings yet
- Theoretical Stress Distribution in Multi-Layered SystemsDocument7 pagesTheoretical Stress Distribution in Multi-Layered SystemsURBANHIJAUNo ratings yet
- Tangent Stiffness Method For Biaxial Bending 1971 (72-1)Document28 pagesTangent Stiffness Method For Biaxial Bending 1971 (72-1)filipeNo ratings yet
- 1.050 Engineering Mechanics: Beam Elasticity - Derivation of Governing EquationDocument7 pages1.050 Engineering Mechanics: Beam Elasticity - Derivation of Governing EquationDilip KumarNo ratings yet
- TM-2122 Mekanika Kekuatan Material: Distribusi TeganganDocument37 pagesTM-2122 Mekanika Kekuatan Material: Distribusi TeganganwahyuNo ratings yet
- Lecture Date: 04.11.2009 Prepared By:: (01) Anas Abdulrahim (02) Engin UstaDocument9 pagesLecture Date: 04.11.2009 Prepared By:: (01) Anas Abdulrahim (02) Engin Ustasibel demirNo ratings yet
- Strength of Materials and Failure TheoriesDocument45 pagesStrength of Materials and Failure Theoriesstallone21No ratings yet
- Planar Beam and Frame Structure AnalysisDocument70 pagesPlanar Beam and Frame Structure AnalysisElmar CuellarNo ratings yet
- Hamilton 1966Document6 pagesHamilton 1966alex thomasNo ratings yet
- Ch.7. Plane Linear Elasticity: Continuum Mechanics Course (MMC)Document40 pagesCh.7. Plane Linear Elasticity: Continuum Mechanics Course (MMC)YordisPalacioNo ratings yet
- Chapter 11Document30 pagesChapter 11elias hayelomNo ratings yet
- AbaqusExplicit Honeycomb Material ModelDocument6 pagesAbaqusExplicit Honeycomb Material Modeladiraju07100% (1)
- ME2112-Lab Manual-1 (Vs Rev)Document5 pagesME2112-Lab Manual-1 (Vs Rev)ZihNo ratings yet
- Little Bit Lame Equation PDFDocument20 pagesLittle Bit Lame Equation PDFAhmad FauzanNo ratings yet
- 3 - 2 - MAT601 - FormingDocument19 pages3 - 2 - MAT601 - FormingJOENo ratings yet
- A Simple Way For Estimating Mechanical Properties From Stress-Strain Diagram Using MATLABDocument5 pagesA Simple Way For Estimating Mechanical Properties From Stress-Strain Diagram Using MATLABAsad MaqsoodNo ratings yet
- Tran-Cong - Phan-Thien - 1986 - Boundary Element Solution For Half-Space Elasticity or Stokes Problem With ADocument10 pagesTran-Cong - Phan-Thien - 1986 - Boundary Element Solution For Half-Space Elasticity or Stokes Problem With Azihou.liuNo ratings yet
- AE 321 Homework 8Document2 pagesAE 321 Homework 8bob toodleNo ratings yet
- Linear Elastic Stress AnalysisDocument27 pagesLinear Elastic Stress AnalysisUr FriendNo ratings yet
- Stress Distribution of I Section Under Combined ForcesDocument15 pagesStress Distribution of I Section Under Combined ForcesNarsingha KharosekarNo ratings yet
- Introduction To Finite Element Analysis - Fundamentals: Opening or CavityDocument42 pagesIntroduction To Finite Element Analysis - Fundamentals: Opening or Cavityvaranasirk1No ratings yet
- 269-287 Article 05Document19 pages269-287 Article 05nabilNo ratings yet
- 3-d ElasticityDocument40 pages3-d Elasticityp_sahoo8686No ratings yet
- Flat Slab by FemDocument8 pagesFlat Slab by Femanuj kumarNo ratings yet
- Singular Behaviour at The End of A Tensile Crack in A Hardening MaterialDocument19 pagesSingular Behaviour at The End of A Tensile Crack in A Hardening MaterialPeterNo ratings yet
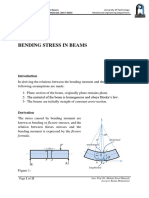
- Bending Stress in Beams: FormulaDocument11 pagesBending Stress in Beams: Formulawatersoul.nNo ratings yet
- School of Engineering - Department of Civil Engineering Academic Year 2013-2014 - Final ExamDocument1 pageSchool of Engineering - Department of Civil Engineering Academic Year 2013-2014 - Final ExamRafi SulaimanNo ratings yet
- Poisson's Ratio and Theories of Failure ReviewDocument21 pagesPoisson's Ratio and Theories of Failure ReviewMuhammad AdilNo ratings yet
- Therzhagi Line TheroyDocument26 pagesTherzhagi Line TheroyRaja GNo ratings yet
- Airy-based equilibrium mesh-free method for static limit analysis of plane problems_1171445Document13 pagesAiry-based equilibrium mesh-free method for static limit analysis of plane problems_1171445Phạm Thị Ánh TuyếtNo ratings yet
- Elastic Buckling of Orthotropic Plates Under Varying Axial StressesDocument8 pagesElastic Buckling of Orthotropic Plates Under Varying Axial StressesManish ShashikantNo ratings yet
- Ch.7. Plane Linear Elasticity: Multimedia Course On Continuum MechanicsDocument69 pagesCh.7. Plane Linear Elasticity: Multimedia Course On Continuum MechanicsNguyễn TúNo ratings yet
- Elastiv Hoockes Law 1d 2dDocument5 pagesElastiv Hoockes Law 1d 2dramNo ratings yet
- Untitled 1Document7 pagesUntitled 1bulitukNo ratings yet
- Chapter 2Document50 pagesChapter 2iffahNo ratings yet
- Chapter 7 Two-Dimensional FormulationDocument18 pagesChapter 7 Two-Dimensional Formulationvivi100% (1)
- NOTES Stress Strain STUDENTDocument5 pagesNOTES Stress Strain STUDENTAntonio MateosNo ratings yet
- Department of Mechanical Engineering: I I, I and The Three Principal StressesDocument1 pageDepartment of Mechanical Engineering: I I, I and The Three Principal StressesAshutosh SharmaNo ratings yet
- Metal Working DerivationsDocument17 pagesMetal Working DerivationsShrutiNo ratings yet
- WWWWDocument18 pagesWWWWศิวาเวช อบมาNo ratings yet
- 2019MAST20029 - Assignment 2Document4 pages2019MAST20029 - Assignment 2leonNo ratings yet
- Crack-Tip Field: ES 247 Fracture Mechanics Zhigang SuoDocument12 pagesCrack-Tip Field: ES 247 Fracture Mechanics Zhigang SuoRamesh SantanaNo ratings yet
- State-Of-The-Art of Research On Seismic Pounding Between Buildings With Aligned SlabsDocument24 pagesState-Of-The-Art of Research On Seismic Pounding Between Buildings With Aligned SlabsRui CbNo ratings yet
- Large Amplitude Free Vibration Analysis of Axial Functionally Graded Timoshenko BeamsDocument17 pagesLarge Amplitude Free Vibration Analysis of Axial Functionally Graded Timoshenko BeamsMitrayan HazraNo ratings yet
- Advances in nonlinear finite element programmingDocument17 pagesAdvances in nonlinear finite element programmingManoj BaralNo ratings yet
- Euler-Bernoulli beam theory explainedDocument20 pagesEuler-Bernoulli beam theory explainedbramo96No ratings yet
- Closed-Form Solutions for Stress AnalysisDocument14 pagesClosed-Form Solutions for Stress AnalysisADITYANo ratings yet
- 1 - Modelling of Soil Behaviour 16082020Document87 pages1 - Modelling of Soil Behaviour 16082020rihongkeeNo ratings yet
- MDP3530 Lecture 3Document23 pagesMDP3530 Lecture 3Mark Nassef NaguibNo ratings yet
- Beam theory linear modelDocument12 pagesBeam theory linear modelClifford InggsNo ratings yet
- Chapter2 - 8 - 7 - Comparison of Failure TheoriesDocument9 pagesChapter2 - 8 - 7 - Comparison of Failure TheoriesDemonic ZealotNo ratings yet
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianFrom EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianRating: 5 out of 5 stars5/5 (1)
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- RAMI45Document21 pagesRAMI45riganNo ratings yet
- Grade - 9 - MYP - 1 - Isotopes - RAM 2Document27 pagesGrade - 9 - MYP - 1 - Isotopes - RAM 2riganNo ratings yet
- Plasticity ReportDocument43 pagesPlasticity ReportriganNo ratings yet
- Plasticity PresentationDocument52 pagesPlasticity PresentationriganNo ratings yet
- Final Report PlasticityDocument45 pagesFinal Report PlasticityriganNo ratings yet
- Jordan U Continuum Mechanics StressDocument53 pagesJordan U Continuum Mechanics StressriganNo ratings yet
- Lecture 5Document51 pagesLecture 5riganNo ratings yet
- Lecture 4Document24 pagesLecture 4riganNo ratings yet
- Es04 3D ElementsDocument13 pagesEs04 3D ElementsAaqib AliNo ratings yet
- LECTURE 5.0 - Flexural Members PDFDocument68 pagesLECTURE 5.0 - Flexural Members PDFIan TorresNo ratings yet
- Monorail Crane Calculation PDF FreeDocument5 pagesMonorail Crane Calculation PDF FreeSudhanshu PalNo ratings yet
- Plan Stress PDFDocument122 pagesPlan Stress PDFmrajansubramanianNo ratings yet
- Modelling Liquefaction-Induced Building Damage in Earthquake Loss EstimationDocument16 pagesModelling Liquefaction-Induced Building Damage in Earthquake Loss EstimationArda YıldırımNo ratings yet
- LRFD Compression Member DesignDocument236 pagesLRFD Compression Member DesignWayne Alegria JumawanNo ratings yet
- Inelastic Local and Lateral Buckling Design Codes: by Alan R. Kemp!Document9 pagesInelastic Local and Lateral Buckling Design Codes: by Alan R. Kemp!carlosNo ratings yet
- Computational Methods For Platicity-SouzaDocument816 pagesComputational Methods For Platicity-SouzaMel Santos100% (7)
- Steel Beams AnalysisDocument15 pagesSteel Beams AnalysisWijayanto BekasiNo ratings yet
- The Effect of Shrinkage Cracks On The Load Bearing Capacity of Steel-Fibre-Reinforced Roller-Compacted - Concrete PavementsDocument27 pagesThe Effect of Shrinkage Cracks On The Load Bearing Capacity of Steel-Fibre-Reinforced Roller-Compacted - Concrete PavementsLouis KiwaNo ratings yet
- Chapter 13 - Non Linear Analysis PDFDocument20 pagesChapter 13 - Non Linear Analysis PDFdeepakNo ratings yet
- Vlasov TheoryDocument19 pagesVlasov TheoryNguyen Ngoc TuanNo ratings yet
- Civ100 M5Document80 pagesCiv100 M5Anonymous WmMP8H6JGNo ratings yet
- Cartesian Tensor With ApplicationsDocument10 pagesCartesian Tensor With ApplicationsrisehighNo ratings yet
- ASTM D 6528 - 00 - Consolidated Undrained Direct Simple Shear Testing of Cohesive Soills PDFDocument9 pagesASTM D 6528 - 00 - Consolidated Undrained Direct Simple Shear Testing of Cohesive Soills PDFDenisse Puelles VillafanaNo ratings yet
- Buckling of ColumnsDocument41 pagesBuckling of Columnsassi_thaer100% (2)
- Experiment of Reinforce Concrete Beams at Different Loading RatesDocument8 pagesExperiment of Reinforce Concrete Beams at Different Loading RateskapolaNo ratings yet
- 1-Mechanical PropertiesDocument105 pages1-Mechanical Propertieslim zhong yi100% (1)
- Viscoelasticity: Chapter SevenDocument40 pagesViscoelasticity: Chapter SevenAyush ChoudharyNo ratings yet
- Plastic Mechanics of Geomaterial PDFDocument258 pagesPlastic Mechanics of Geomaterial PDFalireza سلامNo ratings yet
- RCC Column Subjected To Bending + TensionDocument6 pagesRCC Column Subjected To Bending + TensionNagara SelvarajNo ratings yet
- Simulation of PLAT: No DataDocument11 pagesSimulation of PLAT: No Data03081111No ratings yet
- Thin-Walled Pressure Vessel TheoryDocument9 pagesThin-Walled Pressure Vessel Theoryondoy4925No ratings yet
- EtdDocument274 pagesEtdRory Cristian Cordero RojoNo ratings yet
- Aramis: User Manual - SoftwareDocument129 pagesAramis: User Manual - Softwareotipicni6969No ratings yet
- Baja UTS IrmaDocument69 pagesBaja UTS IrmaArjuna CrewNo ratings yet
- SOM - Tamil (1)Document353 pagesSOM - Tamil (1)anantharuban8993No ratings yet
- AP-T319-16-Asphalt Fatigue Damage Healing and Endurance Limits PDFDocument117 pagesAP-T319-16-Asphalt Fatigue Damage Healing and Endurance Limits PDFAlexandra TorresNo ratings yet
- 10 - Fundamentals of Metal Forming (Chapter 14)Document37 pages10 - Fundamentals of Metal Forming (Chapter 14)Taher al suhamiNo ratings yet
- Physics Project On Properties of ElasticityDocument25 pagesPhysics Project On Properties of Elasticitybagiyo condroNo ratings yet