You might also like
- True Strength IndexDocument5 pagesTrue Strength Indexafsj2uz100% (2)
- PMSM Motor TheoryDocument87 pagesPMSM Motor TheoryKushagra KhamesraNo ratings yet
- Dynamometer: Theory and Application to Engine TestingFrom EverandDynamometer: Theory and Application to Engine TestingNo ratings yet
- Soon Ching Chun PDFDocument45 pagesSoon Ching Chun PDFChristian LunaNo ratings yet
- Automatic Brake Failure Detection and Emergency Braking SystemDocument66 pagesAutomatic Brake Failure Detection and Emergency Braking Systemrohith kuruvaNo ratings yet
- Practical Power System and Protective Relays CommissioningFrom EverandPractical Power System and Protective Relays CommissioningRating: 4.5 out of 5 stars4.5/5 (10)
- Diff Shortening of Tall Steel Building Columns TaranathDocument8 pagesDiff Shortening of Tall Steel Building Columns TaranathgoggingsNo ratings yet
- Numpy and Matplotlib: Purushothaman.V.N March 10, 2011Document27 pagesNumpy and Matplotlib: Purushothaman.V.N March 10, 2011sudheersebastianNo ratings yet
- Wireless Communications Design Handbook: Space Interference: Aspects of Noise, Interference and Environmental ConcernsFrom EverandWireless Communications Design Handbook: Space Interference: Aspects of Noise, Interference and Environmental ConcernsRating: 5 out of 5 stars5/5 (1)
- Electronic Control of Switched Reluctance MachinesFrom EverandElectronic Control of Switched Reluctance MachinesRating: 5 out of 5 stars5/5 (5)
- SEPIC Project ReportDocument102 pagesSEPIC Project Reportmusarraf172No ratings yet
- Power Electronic Control in Electrical SystemsFrom EverandPower Electronic Control in Electrical SystemsRating: 4 out of 5 stars4/5 (1)
- Implementation OF Four Quadrant Operation OF BLDC Motor Using MPCDocument65 pagesImplementation OF Four Quadrant Operation OF BLDC Motor Using MPCsaisanketNo ratings yet
- Power Generation From Speed BrakerDocument54 pagesPower Generation From Speed Brakerajith haridas100% (1)
- Flicker Mitigation in Wind Turbines Using Individual Pitch ControlDocument48 pagesFlicker Mitigation in Wind Turbines Using Individual Pitch ControlnareshNo ratings yet
- A Thesis Submitted in Partial Fulfilment of The Requirements For The Degree ofDocument58 pagesA Thesis Submitted in Partial Fulfilment of The Requirements For The Degree ofAndrejNo ratings yet
- DC Motor Speed Control Using Neural NetworkDocument78 pagesDC Motor Speed Control Using Neural NetworkLuis Eduardo RibeiroNo ratings yet
- Study of Grid Connected Induction Generator For Wind Power ApplicationsDocument33 pagesStudy of Grid Connected Induction Generator For Wind Power Applicationsajit patroNo ratings yet
- Mitigation TechniquesDocument59 pagesMitigation TechniquesPrakash ArumugamNo ratings yet
- A Project Report On AC DC DRIVE AND SPEE PDFDocument33 pagesA Project Report On AC DC DRIVE AND SPEE PDFkarpal singhNo ratings yet
- A Project Report On AC DC DRIVE AND SPEE PDFDocument33 pagesA Project Report On AC DC DRIVE AND SPEE PDFkarpal singhNo ratings yet
- A Project Report ON: Speed Control of DC Motor Using GSM ModuleDocument71 pagesA Project Report ON: Speed Control of DC Motor Using GSM ModuleAnuj TripathiNo ratings yet
- Documentation of PMSMDocument89 pagesDocumentation of PMSM07be1a0213No ratings yet
- Project Using DVRDocument68 pagesProject Using DVRKranthiNo ratings yet
- Linearization Approach For Modeling Power Electronics Devices in Power SystemDocument10 pagesLinearization Approach For Modeling Power Electronics Devices in Power SystemKalyan Reddy AnuguNo ratings yet
- Speed Control of Separately Excited DC Motor Using Neuro Fuzzy TechniqueDocument56 pagesSpeed Control of Separately Excited DC Motor Using Neuro Fuzzy Techniqueraghav4life8724No ratings yet
- Power Quality Issues and Mitigation Techniques Using FACTS DevicesDocument59 pagesPower Quality Issues and Mitigation Techniques Using FACTS Devicesdaniel assefaNo ratings yet
- A Sliding Mode Controller For Induction Motor DrivesDocument62 pagesA Sliding Mode Controller For Induction Motor DrivesAkbar aliNo ratings yet
- Technical Seminar Report on Double Fed Induction GeneratorDocument17 pagesTechnical Seminar Report on Double Fed Induction GeneratorAravind KumarNo ratings yet
- Implementation of PWM Based Firing Scheme For Multilevel Inverter Using MicrocontrollerDocument52 pagesImplementation of PWM Based Firing Scheme For Multilevel Inverter Using MicrocontrollerAbdulaziz MuhammedNo ratings yet
- Reportpdf PDFDocument44 pagesReportpdf PDFkairaNo ratings yet
- Design of A Boost Converter: Department of Electrical Engineering National Institute of Technology RourkelaDocument31 pagesDesign of A Boost Converter: Department of Electrical Engineering National Institute of Technology Rourkela2k18-EE-243 Vethushan VinnayagamoorththiNo ratings yet
- Triboelectric Nanogenerators As Flexible Power Sources: A Technical Seminar Report OnDocument29 pagesTriboelectric Nanogenerators As Flexible Power Sources: A Technical Seminar Report OnRajpranabhNo ratings yet
- ChopperDocument60 pagesChopperSudeep BhesettyNo ratings yet
- Ee-8353 Edc Course MaterialDocument160 pagesEe-8353 Edc Course MaterialMogaka LucasNo ratings yet
- Programming of Pic Micro Controller For PDFDocument40 pagesProgramming of Pic Micro Controller For PDFdondbNo ratings yet
- Santhosh Ragunath Ultimate ThesisDocument59 pagesSanthosh Ragunath Ultimate ThesisSanthoshNo ratings yet
- Wireless Powper Transmission Using ArdunioDocument47 pagesWireless Powper Transmission Using Ardunioரவிக்குமார் பகுத்தறிவாளன்No ratings yet
- Islanding Detection in Distributed GenerationDocument84 pagesIslanding Detection in Distributed GenerationNeha BandhuNo ratings yet
- DFIGDocument69 pagesDFIGpmbalajibtechNo ratings yet
- BlackbookDocument42 pagesBlackbookJyotsna AnandNo ratings yet
- B.E Eee Batchno 14Document91 pagesB.E Eee Batchno 14Dalasa OljiraNo ratings yet
- Modeling And Control Of 3-Ф Grid Connected Inverter System For Distributed Power Generation SystemDocument55 pagesModeling And Control Of 3-Ф Grid Connected Inverter System For Distributed Power Generation SystemJAYADHAR VEERISETTYNo ratings yet
- Gujarat Technological University: Diploma in Electrical EngineeringDocument24 pagesGujarat Technological University: Diploma in Electrical EngineeringSagarNo ratings yet
- Sree Sai MahiDocument82 pagesSree Sai MahiKalyan Reddy AnuguNo ratings yet
- 21243-EE-005 (Surya) (1) - 2Document59 pages21243-EE-005 (Surya) (1) - 2venkatasuryabolisetti4No ratings yet
- 21243-EE-005 (Surya) (1) - 1Document59 pages21243-EE-005 (Surya) (1) - 1venkatasuryabolisetti4No ratings yet
- UPS System Using PV PanelDocument58 pagesUPS System Using PV PanelRamanan MNo ratings yet
- Performance Analysis of Wind... SudanDocument90 pagesPerformance Analysis of Wind... SudanRex abbasNo ratings yet
- Soon Ching ChunDocument45 pagesSoon Ching ChunDivyabharathi Janakiraman100% (1)
- NIT Rourkela ThesisDocument66 pagesNIT Rourkela ThesisParimal SarafNo ratings yet
- 132kv SwitchyardDocument72 pages132kv SwitchyardR.EASWARANNo ratings yet
- Simulation of Parallel Connected Induction Motor On A Single InverterDocument81 pagesSimulation of Parallel Connected Induction Motor On A Single InverterMuram DivyaNo ratings yet
- Analysis of Steady State Performance of DFIG Under Different Power FactorsDocument59 pagesAnalysis of Steady State Performance of DFIG Under Different Power FactorsIvan Contrreras QuispeNo ratings yet
- Elect Sem5Document23 pagesElect Sem5jessica.lesaca02No ratings yet
- AC2DCDocument52 pagesAC2DCTamal SinghaNo ratings yet
- Speed control of DC motor using PWMDocument76 pagesSpeed control of DC motor using PWMVishal SharmaNo ratings yet
- Cie 2 ReportDocument65 pagesCie 2 ReportDVG DEVIL HUNTER gamingNo ratings yet
- Direct Torque Control of Switched Reluctance Motor DrivesDocument65 pagesDirect Torque Control of Switched Reluctance Motor DrivesvarunNo ratings yet
- Handbook of Electrical Engineering: For Practitioners in the Oil, Gas and Petrochemical IndustryFrom EverandHandbook of Electrical Engineering: For Practitioners in the Oil, Gas and Petrochemical IndustryNo ratings yet
- Solvina Fund Allocation Annex 1Document4 pagesSolvina Fund Allocation Annex 1Prashant Mani TripathiNo ratings yet
- Department of Electrical & Electronics Engineering EEE-2nd YearDocument2 pagesDepartment of Electrical & Electronics Engineering EEE-2nd YearPrashant Mani TripathiNo ratings yet
- List of StudentDocument2 pagesList of StudentPrashant Mani TripathiNo ratings yet
- Accurate Institute of Management and Technology: Branch YearDocument2 pagesAccurate Institute of Management and Technology: Branch YearPrashant Mani TripathiNo ratings yet
- Use of Laboratory Log BooksDocument2 pagesUse of Laboratory Log BookshamoodNo ratings yet
- Chap11 20 170 191Document22 pagesChap11 20 170 191Bin SotheaNo ratings yet
- (Open Agriculture) Genotype X Environment Interaction For Yield of Pickling Cucumber in 24 U.S. EnvironmentsDocument16 pages(Open Agriculture) Genotype X Environment Interaction For Yield of Pickling Cucumber in 24 U.S. EnvironmentsAlfredo Muñoz PardoNo ratings yet
- Competency-Based Learning Materials for Programming (.Net Technology) NC IIIDocument44 pagesCompetency-Based Learning Materials for Programming (.Net Technology) NC IIIDenver CastilloNo ratings yet
- "Bureaucracy" and "Rationality" in Weber's Organization TheoryDocument6 pages"Bureaucracy" and "Rationality" in Weber's Organization TheoryAnonymous LGZHCYwNo ratings yet
- Java FileDocument37 pagesJava FileJasmandeep brar100% (1)
- Java Placement QuestionsDocument18 pagesJava Placement QuestionsmeenakshiNo ratings yet
- MAE 256F Homework 1 problems on fracture mechanicsDocument3 pagesMAE 256F Homework 1 problems on fracture mechanicsClaireNo ratings yet
- I B.Tech Regular Examinations Engineering MechanicsDocument12 pagesI B.Tech Regular Examinations Engineering MechanicsGanesh YadavNo ratings yet
- Graphic AidsDocument56 pagesGraphic AidsJoyce GonzagaNo ratings yet
- Lecture21 Canonical TransformationDocument25 pagesLecture21 Canonical TransformationKelvin LNo ratings yet
- CH 6 Fungsi TransferDocument13 pagesCH 6 Fungsi TransferMuhammad Abdul JamilNo ratings yet
- Dac 314 Group 3 (C-V-P Analysis)Document39 pagesDac 314 Group 3 (C-V-P Analysis)Eustus KipkemboiNo ratings yet
- Class 9 NTSE-Maths: Answer The QuestionsDocument14 pagesClass 9 NTSE-Maths: Answer The QuestionsHarshit GargNo ratings yet
- Robotic Assembly of Threaded Fasteners in A Non-Structured EnvironmentDocument15 pagesRobotic Assembly of Threaded Fasteners in A Non-Structured EnvironmentPolco-SwapnilNo ratings yet
- 1997 Vol 23 No 2 1001 AbstractDocument1 page1997 Vol 23 No 2 1001 AbstractFatih KantaşNo ratings yet
- Argyris and Schon S Theory On Congruence and LearningDocument16 pagesArgyris and Schon S Theory On Congruence and Learningnaven100% (1)
- You Can Create An SFAS Matrix by Following These StepsDocument4 pagesYou Can Create An SFAS Matrix by Following These StepspassantNo ratings yet
- Single Stub MatchingDocument13 pagesSingle Stub MatchingHaya AlqahtaniNo ratings yet
- DLL Mathematics-6 Q3 W6Document10 pagesDLL Mathematics-6 Q3 W6Sheryl Ilagan Del RosarioNo ratings yet
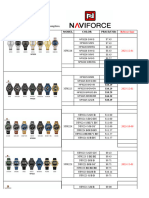
- NAVIFORCE Watch Catalogue in USD - Updated in 20240104Document47 pagesNAVIFORCE Watch Catalogue in USD - Updated in 20240104Perez PerezNo ratings yet
- Quantitative Methods For Business 12Th Edition Anderson Solutions Manual Full Chapter PDFDocument65 pagesQuantitative Methods For Business 12Th Edition Anderson Solutions Manual Full Chapter PDFvernier.decyliclnn4100% (8)
- Practice ProblemsDocument4 pagesPractice ProblemsPalash dasNo ratings yet
- Reactive Distillation Process Optimization by Empirical Formulae ConstructionDocument9 pagesReactive Distillation Process Optimization by Empirical Formulae ConstructionChintan Milan ShahNo ratings yet
- Work - Energy - PowerDocument9 pagesWork - Energy - PowermaryNo ratings yet
- Module 1c Number Systems and PresentationDocument53 pagesModule 1c Number Systems and PresentationMairos Kunze BongaNo ratings yet