You might also like
- Biological and Environmental Hazards, Risks, and DisastersFrom EverandBiological and Environmental Hazards, Risks, and DisastersRamesh SivanpillaiNo ratings yet
- Soil and Root Damage in Forestry: Reducing the Impact of Forest MechanizationFrom EverandSoil and Root Damage in Forestry: Reducing the Impact of Forest MechanizationNo ratings yet
- 242 246 PDFDocument5 pages242 246 PDFJerald Morelos HabilNo ratings yet
- INFLUENCE OF APICAL SHOOT PINCHING AND ETrelDocument37 pagesINFLUENCE OF APICAL SHOOT PINCHING AND ETrelKelly kim UyangurinNo ratings yet
- Khadivi Khub2014Document14 pagesKhadivi Khub2014miraraspopovic020No ratings yet
- A Review On Advances in Pruning To VegetDocument10 pagesA Review On Advances in Pruning To VegetKelly kim UyangurinNo ratings yet
- Genome Wide Association Study of Soybean Seed Germination Under Drought StressDocument13 pagesGenome Wide Association Study of Soybean Seed Germination Under Drought StresspaquitoxNo ratings yet
- Acoustic Testing For Melon Fruit Ripeness Evaluation During Diff Erent Stages of RipeningDocument9 pagesAcoustic Testing For Melon Fruit Ripeness Evaluation During Diff Erent Stages of RipeningChandan Kumar RayNo ratings yet
- Assessment of Production Potentials and Constraaints of Mango (Mangifera INDICA) at Bati, Oromia Zone, EthiopiaDocument9 pagesAssessment of Production Potentials and Constraaints of Mango (Mangifera INDICA) at Bati, Oromia Zone, EthiopiaInternational Journal of Sciences: Basic and Applied Research (IJSBAR)No ratings yet
- 1 s2.0 S1350417708000515 MainDocument6 pages1 s2.0 S1350417708000515 MainShtiukNo ratings yet
- 2020 Robert Lufy Water Loss of Fresh Fruti - Pre Harvest, Harvest and PostharvestDocument16 pages2020 Robert Lufy Water Loss of Fresh Fruti - Pre Harvest, Harvest and PostharvestEdwinNo ratings yet
- Screening Pomegranate (Punica Granatum L.) Genotypes For Drought Tolerance Using Physiological and Phytochemical CharacteristicsDocument11 pagesScreening Pomegranate (Punica Granatum L.) Genotypes For Drought Tolerance Using Physiological and Phytochemical CharacteristicsSol InvictusNo ratings yet
- Effect of CPPU SprayDocument3 pagesEffect of CPPU SprayDodik Novie PurwantoNo ratings yet
- Research On Flexible End-Effectors With Humanoid Grasp Function For Small Spherical Fruit PickingDocument18 pagesResearch On Flexible End-Effectors With Humanoid Grasp Function For Small Spherical Fruit Pickingisham ahNo ratings yet
- Effect of Weeding Regime On The Performance of Cucumber (Cucumussativus) in The South-South Rainforest of NigeriaDocument5 pagesEffect of Weeding Regime On The Performance of Cucumber (Cucumussativus) in The South-South Rainforest of NigeriaajmrdNo ratings yet
- Mango Seed Weevil (Coleoptera: Curculionidae) and Premature Fruit Drop in MangoesDocument4 pagesMango Seed Weevil (Coleoptera: Curculionidae) and Premature Fruit Drop in MangoesJoao Pedro DuarteNo ratings yet
- A Case Study of A Decision Support System On Mango Fruit MaturityDocument10 pagesA Case Study of A Decision Support System On Mango Fruit MaturityRajanikar KandikondaNo ratings yet
- Use of Osmotic Pressure in Allelopathic TrialsDocument12 pagesUse of Osmotic Pressure in Allelopathic TrialsRoxana CupinNo ratings yet
- Content ServerDocument13 pagesContent ServerevayrbtpNo ratings yet
- Invasive Plant ReportDocument12 pagesInvasive Plant ReportSamantha StaufenbergNo ratings yet
- Influence of Two Training Systems On Growth, Yield and Fruit Attributes of Four Apple Cultivars Grafted Onto M.9' RootstockDocument8 pagesInfluence of Two Training Systems On Growth, Yield and Fruit Attributes of Four Apple Cultivars Grafted Onto M.9' RootstockPutchong SaraNo ratings yet
- Monitoring of Pesticide Residues in Fruits and VegDocument12 pagesMonitoring of Pesticide Residues in Fruits and VegPranavhari T.N.No ratings yet
- Some Physical Properties and Mechanical Properties of Black-PlumDocument8 pagesSome Physical Properties and Mechanical Properties of Black-PlumAbubakar Bello AliyuNo ratings yet
- Surveillance On Population Dynamics and Fruits Infestation of Tephritid Fruit Flies (Diptera: Tephritidae) in Mango (Mangifera Indica L.) Orchards of Faisalabad, PakistanDocument7 pagesSurveillance On Population Dynamics and Fruits Infestation of Tephritid Fruit Flies (Diptera: Tephritidae) in Mango (Mangifera Indica L.) Orchards of Faisalabad, PakistanAmin MojiriNo ratings yet
- Pre-Harvest Fruit Bagging: A Useful Approach For Plant Protection and Improved Post-Harvest Fruit Quality - A ReviewDocument14 pagesPre-Harvest Fruit Bagging: A Useful Approach For Plant Protection and Improved Post-Harvest Fruit Quality - A ReviewZed Marlie SantosNo ratings yet
- Rol of MorphologyDocument6 pagesRol of MorphologyDanielaMontesNo ratings yet
- Effect of Trialeurodes Vaporariorum (Homoptera: Aleyrodidae) On Yield of Fresh Market TomatoesDocument8 pagesEffect of Trialeurodes Vaporariorum (Homoptera: Aleyrodidae) On Yield of Fresh Market TomatoessebastianNo ratings yet
- Jurnal Keteknikan PertanianDocument10 pagesJurnal Keteknikan PertanianWhisnu AdynugrohoNo ratings yet
- Fruit ShapeDocument9 pagesFruit Shapealka_47No ratings yet
- J - Pretreatment GerminationDocument9 pagesJ - Pretreatment GerminationMary GinetaNo ratings yet
- Inhibitory Factors That Affect The Ripening of Pear Fruit On The TreDocument7 pagesInhibitory Factors That Affect The Ripening of Pear Fruit On The TreEvelyn Cahuana HuamaniNo ratings yet
- Banana Desucker ResearchDocument7 pagesBanana Desucker ResearchNop KongNo ratings yet
- Banana Desucker Research PDFDocument7 pagesBanana Desucker Research PDFNop KongNo ratings yet
- Effects of Drought Stress On Growth, Physiological and Biochemical Parameters of Two Ethiopian Red Pepper) CultivarsDocument7 pagesEffects of Drought Stress On Growth, Physiological and Biochemical Parameters of Two Ethiopian Red Pepper) CultivarsShailendra RajanNo ratings yet
- The Effect of Three Organic Amendments On Early Growth of Yellow Passion Fruit (Passi Ora Edulis Var. Flavicarpa)Document6 pagesThe Effect of Three Organic Amendments On Early Growth of Yellow Passion Fruit (Passi Ora Edulis Var. Flavicarpa)Kevin Junior Castillo ValverdeNo ratings yet
- Morpho-Physiological and Agronomical Response To Intermittent Drought in Groundnut Genotypes Under Sahelian EnvironmentDocument9 pagesMorpho-Physiological and Agronomical Response To Intermittent Drought in Groundnut Genotypes Under Sahelian EnvironmentIJAR JOURNALNo ratings yet
- Effect of Pruning and Row Distance On Some Characteristics in KarelaDocument8 pagesEffect of Pruning and Row Distance On Some Characteristics in KarelaOpenaccess Research paperNo ratings yet
- Postharvest Biology and TechnologyDocument15 pagesPostharvest Biology and Technologynola agustinaNo ratings yet
- Postharvest Biology and TechnologyDocument8 pagesPostharvest Biology and TechnologyMarcos MotaNo ratings yet
- Balbo NT in 2013Document7 pagesBalbo NT in 2013JhonNo ratings yet
- Can Vegetables ....Document17 pagesCan Vegetables ....Oliver TalipNo ratings yet
- Effect of Mango Weevil (Coleoptera: Curculionidae) Damage On Mango Seed Viability in HawaiiDocument5 pagesEffect of Mango Weevil (Coleoptera: Curculionidae) Damage On Mango Seed Viability in HawaiiJoao Pedro DuarteNo ratings yet
- Potato Aoustic 11Document6 pagesPotato Aoustic 11Mohini GuptaNo ratings yet
- Effect of Locally Available Fruit Waste On Treatment of Water TurbidityDocument9 pagesEffect of Locally Available Fruit Waste On Treatment of Water TurbiditySulaiman OluwapelumiNo ratings yet
- Artikel JTCS - NasionalDocument9 pagesArtikel JTCS - NasionalNeni MusyarofahNo ratings yet
- Role of Auxin in Horticulture Crops !.docxDocument10 pagesRole of Auxin in Horticulture Crops !.docxJabroot KhanNo ratings yet
- Morfologia de Losacaro Del TostadoDocument9 pagesMorfologia de Losacaro Del Tostadomel93egNo ratings yet
- Shock Absorbing Surfaces For Collecting Fruit During The Mechanical Harvesting of CitrusDocument8 pagesShock Absorbing Surfaces For Collecting Fruit During The Mechanical Harvesting of CitrusAhmyd MuslymNo ratings yet
- Assessment of Post-Harvest Handling Practices Knowledge and Losses of Fruits in Bagamoyo District of TanzaniaDocument9 pagesAssessment of Post-Harvest Handling Practices Knowledge and Losses of Fruits in Bagamoyo District of TanzaniaAlexander DeckerNo ratings yet
- CPPU and GA3 Application On GrapeDocument6 pagesCPPU and GA3 Application On GrapeDodik Novie PurwantoNo ratings yet
- Tecnologia de EmergênciaDocument14 pagesTecnologia de EmergênciaGabriela MouraNo ratings yet
- Physiological Characters and Tomato Yield Under Drought StressDocument7 pagesPhysiological Characters and Tomato Yield Under Drought StressAfsana AfrinNo ratings yet
- Jim Flore Seminar AnnouncementDocument1 pageJim Flore Seminar AnnouncementAnonymous tGJ2lopsNo ratings yet
- Fungi Associated With The Spoilage of Water Melon Fruits (Citrullus Lanatus Thumb.) in Jega Local Government Area, Kebbi State, NigeriaDocument5 pagesFungi Associated With The Spoilage of Water Melon Fruits (Citrullus Lanatus Thumb.) in Jega Local Government Area, Kebbi State, NigeriaPrecious IJNo ratings yet
- On-Tree Water Spray Affects Superficial Scald Severity and Fruit Quality in Granny Smith' ApplesDocument5 pagesOn-Tree Water Spray Affects Superficial Scald Severity and Fruit Quality in Granny Smith' ApplesShailendra RajanNo ratings yet
- Critical Analysis of Data Fusion of Drought and Disease in Relation To Its Effect On Crops-1Document9 pagesCritical Analysis of Data Fusion of Drought and Disease in Relation To Its Effect On Crops-1Olalekan AbdulRasheed OgunjimiNo ratings yet
- Journals Hortsci 29 9 Article-P982-PreviewDocument2 pagesJournals Hortsci 29 9 Article-P982-PreviewPutchong SaraNo ratings yet
- Plant Physiological ParametersDocument10 pagesPlant Physiological ParametersMentewab EthiopiaNo ratings yet
- Temperate Fruit Plant Propagation Through Temporary ImmersionDocument8 pagesTemperate Fruit Plant Propagation Through Temporary ImmersionjackelinjarumiNo ratings yet
- Crop Protection: Sindhuja Sankaran, Reza EhsaniDocument6 pagesCrop Protection: Sindhuja Sankaran, Reza EhsaniCINDY NATHALIA GARCIA AGUDELONo ratings yet
- Ahmad 2013Document24 pagesAhmad 2013yasminaNo ratings yet
- Jcs 05 00213Document10 pagesJcs 05 00213yasminaNo ratings yet
- International Journal of Adhesion and AdhesivesDocument11 pagesInternational Journal of Adhesion and AdhesivesyasminaNo ratings yet
- Journal of The American Ceramic Society - 2004 - Krohn - Biaxial Flexure Strength and Dynamic Fatigue of Soda Lime SilicaDocument6 pagesJournal of The American Ceramic Society - 2004 - Krohn - Biaxial Flexure Strength and Dynamic Fatigue of Soda Lime SilicayasminaNo ratings yet
- 1 s2.0 S0143749619302283 MainDocument10 pages1 s2.0 S0143749619302283 MainyasminaNo ratings yet
- Adv Eng Mater - 2018 - Bedon - Transparency in Structural Glass Systems Via Mechanical Adhesive and Laminated ConnectionsDocument19 pagesAdv Eng Mater - 2018 - Bedon - Transparency in Structural Glass Systems Via Mechanical Adhesive and Laminated ConnectionsyasminaNo ratings yet
- Four-Point Bending Test of Determining Stress-StrainDocument4 pagesFour-Point Bending Test of Determining Stress-StrainyasminaNo ratings yet
- Environmental Effects On Initiation and Propagation of Surface Defects On Silicate Glasses: Scratch and Fracture Toughness StudyDocument10 pagesEnvironmental Effects On Initiation and Propagation of Surface Defects On Silicate Glasses: Scratch and Fracture Toughness StudyyasminaNo ratings yet
- Iso 11600-2002 (2004)Document16 pagesIso 11600-2002 (2004)yasminaNo ratings yet
- Influence of Volume Drop On Surface Free Energy ofDocument13 pagesInfluence of Volume Drop On Surface Free Energy ofyasminaNo ratings yet
- 1 s2.0 S0272884217323131 MainDocument9 pages1 s2.0 S0272884217323131 MainyasminaNo ratings yet
- Effect of Bio-Inspired Surface Texture On The Resistance of 3d-Printed Polycarbonate Bonded JointsDocument17 pagesEffect of Bio-Inspired Surface Texture On The Resistance of 3d-Printed Polycarbonate Bonded JointsyasminaNo ratings yet
- Ncomms 7360Document8 pagesNcomms 7360yasminaNo ratings yet
- Chem Listy GlassDocument5 pagesChem Listy GlassyasminaNo ratings yet
- 1 s2.0 S0022309398007996 MainDocument6 pages1 s2.0 S0022309398007996 MainyasminaNo ratings yet
- 1 s2.0 S0167577X18305305 MainDocument4 pages1 s2.0 S0167577X18305305 MainyasminaNo ratings yet
- 1 s2.0 S0022309399002975 MainextDocument8 pages1 s2.0 S0022309399002975 MainextyasminaNo ratings yet
- Sika Release Oil Technical Data SheetDocument2 pagesSika Release Oil Technical Data SheetyasminaNo ratings yet
- Journal of The American Ceramic Society - November 1989 - Holden - Healing of Glass in Humid EnvironmentsDocument5 pagesJournal of The American Ceramic Society - November 1989 - Holden - Healing of Glass in Humid EnvironmentsyasminaNo ratings yet
- 1 s2.0 S152661252100517X MainDocument14 pages1 s2.0 S152661252100517X MainyasminaNo ratings yet
- Influence of Raw Material Surface Roughening On THDocument17 pagesInfluence of Raw Material Surface Roughening On THyasminaNo ratings yet
- 1 s2.0 S0167663614001665 MainDocument18 pages1 s2.0 S0167663614001665 MainyasminaNo ratings yet
- 1 s2.0 S0254058409001151 MainDocument6 pages1 s2.0 S0254058409001151 MainyasminaNo ratings yet
- Materials 15 03817Document23 pagesMaterials 15 03817yasminaNo ratings yet
- Structural Concrete - 2021 - Clau - A Comparative Evaluation of Strain Measurement Techniques in Reinforced ConcreteDocument16 pagesStructural Concrete - 2021 - Clau - A Comparative Evaluation of Strain Measurement Techniques in Reinforced ConcreteyasminaNo ratings yet
- 1 s2.0 S0254058403002700 MainDocument13 pages1 s2.0 S0254058403002700 MainyasminaNo ratings yet
- Thierry Surface Modification Solutions For ManufacturersDocument9 pagesThierry Surface Modification Solutions For ManufacturersyasminaNo ratings yet
- Determination of Bonding Failures in Transparent MDocument17 pagesDetermination of Bonding Failures in Transparent MyasminaNo ratings yet
- Digital Image Correlation (DIC) :A Revolution in Engineering MeasurementsDocument44 pagesDigital Image Correlation (DIC) :A Revolution in Engineering MeasurementsyasminaNo ratings yet
- Cagnacci2021 Article Four-pointBendingTestsOnLaminaDocument22 pagesCagnacci2021 Article Four-pointBendingTestsOnLaminayasminaNo ratings yet
- Cu 31924004658435Document606 pagesCu 31924004658435Quangvu HoangNo ratings yet
- Skirt Bracing Calc For Vertical Pressure VesselsDocument4 pagesSkirt Bracing Calc For Vertical Pressure Vesselsnagtummala100% (1)
- Compressive Test of Cylindrical Concrete SpecimenDocument5 pagesCompressive Test of Cylindrical Concrete SpecimenJenevive TumacderNo ratings yet
- Sullair WSDocument70 pagesSullair WSToso Eko Purwanto100% (1)
- Experiment 6'SDocument12 pagesExperiment 6'SShennyKoh67% (3)
- EmftDocument6 pagesEmftsyamalaNo ratings yet
- StructuralMechanicsModuleUsersGuide PDFDocument420 pagesStructuralMechanicsModuleUsersGuide PDFFrancisco RibeiroNo ratings yet
- PVElite ManualDocument691 pagesPVElite Manuals.mladin75% (4)
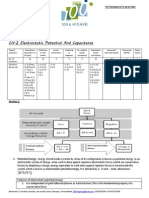
- Capacitance and Potential 2014Document25 pagesCapacitance and Potential 2014Romil GargNo ratings yet
- Lecture 1: Fundamentals 1/3: Discretization Of: Convection-Diffusion Equation by Finite Difference MethodDocument27 pagesLecture 1: Fundamentals 1/3: Discretization Of: Convection-Diffusion Equation by Finite Difference MethodJulio Santos100% (1)
- Cable Stayed Structures-SLDocument16 pagesCable Stayed Structures-SLShivansh Singh Gautam100% (1)
- L298 Dual H-Bridge Motor Driver DatasheetDocument3 pagesL298 Dual H-Bridge Motor Driver DatasheetSuresh LNo ratings yet
- Review On Thermomechanical Processing of Advanced High Strength SteelsDocument130 pagesReview On Thermomechanical Processing of Advanced High Strength SteelsharishNo ratings yet
- EAp1 Basis of DesignDocument6 pagesEAp1 Basis of DesignSaahil KhaanNo ratings yet
- KPS Inst Manual Ver 6 (1) .1 EngDocument56 pagesKPS Inst Manual Ver 6 (1) .1 EngMiroslav RakicNo ratings yet
- Quizlet Com 8175072 Atpl Ins Formulas Flash CardsDocument6 pagesQuizlet Com 8175072 Atpl Ins Formulas Flash Cardsnathan zizekNo ratings yet
- Screw Thread MeasurementDocument55 pagesScrew Thread MeasurementMadhuNo ratings yet
- AMT 211 Aircraft GeneratorDocument4 pagesAMT 211 Aircraft Generatorbnolasco100% (1)
- EEM Unit 2Document20 pagesEEM Unit 2Bhavesh BodkeNo ratings yet
- Electric Furnace SteelmakingDocument136 pagesElectric Furnace SteelmakingIsrael Damian Silva Rosado100% (2)
- Gravitation - JEE Main 2024 January Question Bank - MathonGoDocument4 pagesGravitation - JEE Main 2024 January Question Bank - MathonGoAnil KhandekarNo ratings yet
- LT Steel STDocument9 pagesLT Steel STSyed Umair RizviNo ratings yet
- Tutorial 1 - Getting Started On EnergyPlus - 20120618 - 0Document28 pagesTutorial 1 - Getting Started On EnergyPlus - 20120618 - 0PaulaErikaMANo ratings yet
- Combustion Process SimulationDocument6 pagesCombustion Process SimulationKingsley Etornam AnkuNo ratings yet
- TOP 3-2-807 1985 Nondestructive Testing of MaterialsDocument19 pagesTOP 3-2-807 1985 Nondestructive Testing of MaterialsDaoudNo ratings yet
- Electrical World 70 New yDocument1,306 pagesElectrical World 70 New yZokiNo ratings yet
- PW and Wfi Storage and Distribution Systems Design and OperationDocument33 pagesPW and Wfi Storage and Distribution Systems Design and Operationmanojdhamne5802No ratings yet
- 5th Grade Math ChecklistDocument4 pages5th Grade Math ChecklistCheryl Dick100% (2)
- White Paper On The CheyTac M200 SystemDocument20 pagesWhite Paper On The CheyTac M200 Systemopksrj100% (1)
- M Tech Thermal and Fluids EngineeringDocument26 pagesM Tech Thermal and Fluids EngineeringSumanNo ratings yet