You might also like
- VC AndrewsDocument3 pagesVC AndrewsLesa O'Leary100% (1)
- Rubber Band Arrangements - Concert BandDocument25 pagesRubber Band Arrangements - Concert BandJonatas Souza100% (1)
- Fabrication & Controling of A Manipulator With Specific Coloured Object DetectionDocument18 pagesFabrication & Controling of A Manipulator With Specific Coloured Object DetectionTusher Saha50% (8)
- Tendon Transmission Efficiency of A Two-Finger Haptic Glove: Zhou MA, Pinhas Ben-TzviDocument6 pagesTendon Transmission Efficiency of A Two-Finger Haptic Glove: Zhou MA, Pinhas Ben-TzviDanny DurhamNo ratings yet
- Conferencepaper 2Document5 pagesConferencepaper 2Leo BoyNo ratings yet
- Gesture Controlled Mobile Robotic ArmDocument3 pagesGesture Controlled Mobile Robotic ArmAfsin RabbaniNo ratings yet
- Biomechatronic HandDocument16 pagesBiomechatronic Handjason barberNo ratings yet
- Animatronic Hand Using Arduino: S. B. Jain Institute of Technology Management and Research, Nagpur, Maharashtra, IndiaDocument4 pagesAnimatronic Hand Using Arduino: S. B. Jain Institute of Technology Management and Research, Nagpur, Maharashtra, IndiaOBAID MUFIZNo ratings yet
- Wireless Flex Sensor Control Robot ArmDocument54 pagesWireless Flex Sensor Control Robot Armmohammed hussainNo ratings yet
- A Tele-Operation Interface With A Motion Capture System and A Haptic GloveDocument6 pagesA Tele-Operation Interface With A Motion Capture System and A Haptic GloveVigneshGsNo ratings yet
- Yang 2015Document6 pagesYang 2015Romero GhyoNo ratings yet
- Robotics Unit 1.mergedDocument16 pagesRobotics Unit 1.mergedClamant GATE AspirantNo ratings yet
- Development of Cable-Driven Anthropomorphic Robot Hand: Sungjae Min and Sooyeong YiDocument8 pagesDevelopment of Cable-Driven Anthropomorphic Robot Hand: Sungjae Min and Sooyeong YiSahala HydroseNo ratings yet
- Eagle Eye™: Team Lead: Saad Qaisar Hammad Hassan Adeel Chaudhari Abdul Moiz JadoonDocument3 pagesEagle Eye™: Team Lead: Saad Qaisar Hammad Hassan Adeel Chaudhari Abdul Moiz JadoonHammad HassanNo ratings yet
- Biomechatronic Hand: Guide: Prof. P.Dhotrad Seminar By: Sagar.S.KulkarniDocument16 pagesBiomechatronic Hand: Guide: Prof. P.Dhotrad Seminar By: Sagar.S.KulkarniGireesh BelavagiNo ratings yet
- Biomechatronic Hand 05022013091334 Biomechatronic HandDocument15 pagesBiomechatronic Hand 05022013091334 Biomechatronic HandMahesh routNo ratings yet
- Ariyan To 2016Document6 pagesAriyan To 2016Oscar PullaNo ratings yet
- Gesture Replication Robo-ArmDocument10 pagesGesture Replication Robo-ArmIJRASETPublicationsNo ratings yet
- Edward Cheung and Vladimir Lumelsky Yale University, Department of Electrical Engineering New Haven, Connecticut 06520Document5 pagesEdward Cheung and Vladimir Lumelsky Yale University, Department of Electrical Engineering New Haven, Connecticut 06520ChinmayMaxNo ratings yet
- Wireless Synchronized Robotic ArmDocument6 pagesWireless Synchronized Robotic ArmMuhammad AdnanNo ratings yet
- Introduction To Robotics ArmDocument23 pagesIntroduction To Robotics ArmHritikNo ratings yet
- Unit 6 Industrial RoboticsDocument74 pagesUnit 6 Industrial RoboticsMURALIGOCAM_29070605No ratings yet
- G9. FYP ProposalDocument9 pagesG9. FYP ProposalSaqlain 6No ratings yet
- Design of A Redundant Arm For Yiren Humanoid Robot: Tiejun ZhaoDocument5 pagesDesign of A Redundant Arm For Yiren Humanoid Robot: Tiejun ZhaoAmit SinghNo ratings yet
- Master-Slave Control of A Teleoperated Anthropomorphic Robotic Arm With Gripping Force SensingDocument21 pagesMaster-Slave Control of A Teleoperated Anthropomorphic Robotic Arm With Gripping Force SensingSaurabh KorgaonkarNo ratings yet
- Elements of Mechanical EngineeringDocument76 pagesElements of Mechanical EngineeringArjun Reddy NareddyNo ratings yet
- Robotic Arm Project ReportDocument49 pagesRobotic Arm Project Reportarunguptha_gsNo ratings yet
- Electrical and Electronics Engineering Seminar Topic: Hand Gesture Robotic ArmDocument27 pagesElectrical and Electronics Engineering Seminar Topic: Hand Gesture Robotic ArmShubham Bodade100% (1)
- Design of Space Robotic Arm-Hand System and Operation ResearchDocument6 pagesDesign of Space Robotic Arm-Hand System and Operation ResearchSiraj AhmedNo ratings yet
- Mapping Human To Robot Motion With Functional Anthropomorphism For Teleoperation and Telemanipulation With Robot Arm Hand SystemsDocument1 pageMapping Human To Robot Motion With Functional Anthropomorphism For Teleoperation and Telemanipulation With Robot Arm Hand SystemsBoshyManNo ratings yet
- Wireless User Controlled Robotic Arm: Dejon1b@cmich - EduDocument8 pagesWireless User Controlled Robotic Arm: Dejon1b@cmich - EduAaron AlonsoNo ratings yet
- (128-137) A.Salam Al-AmmriDocument10 pages(128-137) A.Salam Al-Ammribahaa03No ratings yet
- Modelling and Finite Element Based Analysis of A Five Fingered Underactuated Robotic HandDocument11 pagesModelling and Finite Element Based Analysis of A Five Fingered Underactuated Robotic HandIJRASETPublicationsNo ratings yet
- Fundamentals of Robotics: Brief HistoryDocument10 pagesFundamentals of Robotics: Brief HistorymikeemackNo ratings yet
- Mini Project SynopsisDocument9 pagesMini Project SynopsisRohitNo ratings yet
- JCSSP 2010 955Document8 pagesJCSSP 2010 955Jamsheer KpNo ratings yet
- SM3075Document15 pagesSM3075eir235dNo ratings yet
- Intro To RobotDocument43 pagesIntro To RobotHarsha VardhanNo ratings yet
- Design and Fabrication of 3-DOF Robot Arm Using Parallelogram MechanismsDocument6 pagesDesign and Fabrication of 3-DOF Robot Arm Using Parallelogram MechanismsWARSE JournalsNo ratings yet
- Unit 1Document21 pagesUnit 1kssrao13No ratings yet
- Information Science and Engineering Virtual HandDocument42 pagesInformation Science and Engineering Virtual HandGouty XavieriteNo ratings yet
- Dr. Ambedkar Institute of Technology: Under The Guidance ofDocument6 pagesDr. Ambedkar Institute of Technology: Under The Guidance ofSushanth KengunteNo ratings yet
- The Humanoid Robot ARMAR: Design and Control: June 2004Document7 pagesThe Humanoid Robot ARMAR: Design and Control: June 2004Sulagna RoyNo ratings yet
- Low Cost ExoskeletonDocument16 pagesLow Cost ExoskeletonJony WalkerNo ratings yet
- Live Human Detecting Robot For Earthquak PDFDocument3 pagesLive Human Detecting Robot For Earthquak PDFsiddharthNo ratings yet
- Articulated Robotic ArmDocument9 pagesArticulated Robotic ArmAkshat MishraNo ratings yet
- Robotics Unit-1 QBDocument5 pagesRobotics Unit-1 QBveerapandianNo ratings yet
- ReportnewDocument18 pagesReportnewApoorva RNo ratings yet
- Humanoid Robotic Hand Performing The Sign Language: A MotionsDocument6 pagesHumanoid Robotic Hand Performing The Sign Language: A Motionssaqlain saqiNo ratings yet
- Robot Hand Movement Electromyography SignalDocument23 pagesRobot Hand Movement Electromyography SignalWilliam VenegasNo ratings yet
- 4164 5995 1 PBDocument7 pages4164 5995 1 PBmohamed rizwanNo ratings yet
- Animatronic Arm Using Wireless Gesture: Bachelor of Technology Mechanical EngineeringDocument4 pagesAnimatronic Arm Using Wireless Gesture: Bachelor of Technology Mechanical EngineeringAkhilesh YadavNo ratings yet
- Abstract-This Paper Presents A Design of Controlled RoboticDocument2 pagesAbstract-This Paper Presents A Design of Controlled RoboticMOURANI BHARNo ratings yet
- Ifet College of Engineering: (An Autonomous Institution) Department of Information and TechnologyDocument9 pagesIfet College of Engineering: (An Autonomous Institution) Department of Information and TechnologySHAHUL HAMEED.SNo ratings yet
- Arduino Robotic Hand: Survey Paper: Vaibhav Oza Pranav MehtaDocument5 pagesArduino Robotic Hand: Survey Paper: Vaibhav Oza Pranav MehtacarlosNo ratings yet
- 66 20 GestureDocument8 pages66 20 GestureAfsin RabbaniNo ratings yet
- Robotic Arm Control Through Mimicking of Miniature Robotic ArmDocument7 pagesRobotic Arm Control Through Mimicking of Miniature Robotic Armbendali nadirNo ratings yet
- SR211122201836Document6 pagesSR211122201836Shailesh RanawareNo ratings yet
- Design of A Quadcopter With A Hand Glove ControlDocument5 pagesDesign of A Quadcopter With A Hand Glove Controlashok pandiyanNo ratings yet
- A Wireless Implementation of A Prosthetic Animatronic HandDocument5 pagesA Wireless Implementation of A Prosthetic Animatronic HandOBAID MUFIZNo ratings yet
- Robot Final ReportDocument14 pagesRobot Final ReportHaiderNo ratings yet
- Engineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringFrom EverandEngineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringNo ratings yet
- Aspects Regarding by The Network Enabled Logistics of Military Structures BRASOVDocument112 pagesAspects Regarding by The Network Enabled Logistics of Military Structures BRASOVGrigore JelerNo ratings yet
- Determination of Electromagnetic Field Absorption in A Human Head Model REWIEV BRASOVDocument143 pagesDetermination of Electromagnetic Field Absorption in A Human Head Model REWIEV BRASOVGrigore JelerNo ratings yet
- Numeric Modeling in Thermal Effects Analysis of Human Body Exposure BrasovDocument124 pagesNumeric Modeling in Thermal Effects Analysis of Human Body Exposure BrasovGrigore JelerNo ratings yet
- The Graphite Bomb An Overview of Its Basic Military Applications REWIEW BRASOVDocument156 pagesThe Graphite Bomb An Overview of Its Basic Military Applications REWIEW BRASOVGrigore JelerNo ratings yet
- Local Computer Networks Maintenance MTA ReviewDocument20 pagesLocal Computer Networks Maintenance MTA ReviewGrigore JelerNo ratings yet
- DETERMINATION SAR FOR DIFFERENT TYPES Mta RewiewDocument10 pagesDETERMINATION SAR FOR DIFFERENT TYPES Mta RewiewGrigore JelerNo ratings yet
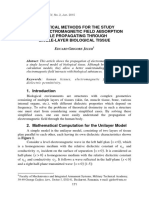
- Analytical Methods For The Study of The Electromagnetic Field Absorption While Propagating ThroughDocument9 pagesAnalytical Methods For The Study of The Electromagnetic Field Absorption While Propagating ThroughGrigore JelerNo ratings yet
- Autonomouslastmileresupply Strategiccontext 23may2017 170525152433Document20 pagesAutonomouslastmileresupply Strategiccontext 23may2017 170525152433Grigore JelerNo ratings yet
- The Effect of Electromagnetic Radiation Emitted by Cell Phones On Population BRASOVDocument203 pagesThe Effect of Electromagnetic Radiation Emitted by Cell Phones On Population BRASOVGrigore JelerNo ratings yet
- Part 3 Transportation and LogisticsDocument16 pagesPart 3 Transportation and LogisticsGrigore JelerNo ratings yet
- A521578 MedicinaDocument52 pagesA521578 MedicinaGrigore JelerNo ratings yet
- Applications of Unmanned Systems in Military Logistics, Journan UNAPDocument126 pagesApplications of Unmanned Systems in Military Logistics, Journan UNAPGrigore JelerNo ratings yet
- 1 Brief Historical Milestones On The Evolution of UAV Systems 1914 - 1939Document198 pages1 Brief Historical Milestones On The Evolution of UAV Systems 1914 - 1939Grigore JelerNo ratings yet
- Analysis of The Vulnerabilities of Unmanned Aerial Vehicles To Cyber Attacks Review-No2-2020Document78 pagesAnalysis of The Vulnerabilities of Unmanned Aerial Vehicles To Cyber Attacks Review-No2-2020Grigore JelerNo ratings yet
- ADS-B Survey Revised 06-30-2017 2Document38 pagesADS-B Survey Revised 06-30-2017 2Grigore JelerNo ratings yet
- Security of Unmanned Aerial Vehicle Systems Against Cyber-Physical AttacksDocument13 pagesSecurity of Unmanned Aerial Vehicle Systems Against Cyber-Physical AttacksGrigore JelerNo ratings yet
- Article 3071Document17 pagesArticle 3071Grigore JelerNo ratings yet
- Sensors 19 01126Document18 pagesSensors 19 01126Grigore JelerNo ratings yet
- Jeler Grigore TraducereDocument10 pagesJeler Grigore TraducereGrigore JelerNo ratings yet
- Overviewcybersecurity 180524202111Document43 pagesOverviewcybersecurity 180524202111Grigore JelerNo ratings yet
- OoopDocument11 pagesOoopGrigore JelerNo ratings yet
- Jeler Grigore Romana Forma EnglezaDocument7 pagesJeler Grigore Romana Forma EnglezaGrigore JelerNo ratings yet
- Automated Storage and Retrieval SystemDocument18 pagesAutomated Storage and Retrieval SystemGrigore JelerNo ratings yet
- Jeler Grigore Forma Engleza FinalaDocument8 pagesJeler Grigore Forma Engleza FinalaGrigore JelerNo ratings yet
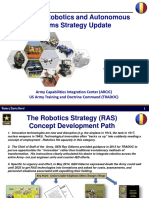
- Shaping The Future: Army Robotics and Autonomous Systems: March 2016Document14 pagesShaping The Future: Army Robotics and Autonomous Systems: March 2016Grigore JelerNo ratings yet
- PLAs - Unmanned - Aerial - Systems UAV CHINEZESTIDocument37 pagesPLAs - Unmanned - Aerial - Systems UAV CHINEZESTIGrigore Jeler100% (1)
- Jamming of UAV Remote Control Systems Using Software Defined RadioDocument7 pagesJamming of UAV Remote Control Systems Using Software Defined RadioGrigore JelerNo ratings yet
- Ijser: Why Unmanned Aircraft Systems Failed For A Century?Document11 pagesIjser: Why Unmanned Aircraft Systems Failed For A Century?Grigore JelerNo ratings yet
- Capabilities of The Unmanned Aerial Vehicles in Logistic SupportDocument5 pagesCapabilities of The Unmanned Aerial Vehicles in Logistic SupportGrigore JelerNo ratings yet
- Compact 1.8" Height Standardized Installation 9 Months To Flight Powerful and LightweightDocument2 pagesCompact 1.8" Height Standardized Installation 9 Months To Flight Powerful and LightweightStanley Ochieng' OumaNo ratings yet
- ANS145 - Beef Cattle ProductionDocument52 pagesANS145 - Beef Cattle ProductionEgie BulawinNo ratings yet
- Assessment 4 PDFDocument10 pagesAssessment 4 PDFAboud Hawrechz MacalilayNo ratings yet
- Heart Rate Variability Threshold As An Alternative.25Document6 pagesHeart Rate Variability Threshold As An Alternative.25Wasly SilvaNo ratings yet
- Universal and Commercial Banks in The PhilippinesDocument1 pageUniversal and Commercial Banks in The Philippinesjohngo888No ratings yet
- Forces L2 Measuring Forces WSDocument4 pagesForces L2 Measuring Forces WSAarav KapoorNo ratings yet
- 7 ElevenDocument80 pages7 ElevenakashNo ratings yet
- K MCQsDocument6 pagesK MCQsF ParikhNo ratings yet
- Windows System Shortcut CommandsDocument2 pagesWindows System Shortcut CommandsVenkatesh YerraNo ratings yet
- TAC42055 - HO01 Edition I2.0: Section 1 Module 1 Page 1Document69 pagesTAC42055 - HO01 Edition I2.0: Section 1 Module 1 Page 1matheus santosNo ratings yet
- Route Clearence TeamDocument41 pagesRoute Clearence Teamctenar2No ratings yet
- Beamng DxdiagDocument22 pagesBeamng Dxdiagsilvioluismoraes1No ratings yet
- Em FlexicokingDocument8 pagesEm FlexicokingHenry Saenz0% (1)
- Advanced Java SlidesDocument134 pagesAdvanced Java SlidesDeepa SubramanyamNo ratings yet
- Tourbier Renewal NoticeDocument5 pagesTourbier Renewal NoticeCristina Marie DongalloNo ratings yet
- Micro - Systemic Bacteriology Questions PDFDocument79 pagesMicro - Systemic Bacteriology Questions PDFShashipriya AgressNo ratings yet
- Negative Feedback AmplifierDocument31 pagesNegative Feedback AmplifierPepNo ratings yet
- Donnan Membrane EquilibriaDocument37 pagesDonnan Membrane EquilibriamukeshNo ratings yet
- Catalog Tu ZG3.2 Gian 35kV H'MunDocument40 pagesCatalog Tu ZG3.2 Gian 35kV H'MunHà Văn TiếnNo ratings yet
- Ged 102 Mathematics in The Modern WorldDocument84 pagesGed 102 Mathematics in The Modern WorldKier FormelozaNo ratings yet
- Strategic Audit of VodafoneDocument35 pagesStrategic Audit of VodafoneArun Guleria89% (9)
- Annex To ED Decision 2013-015-RDocument18 pagesAnnex To ED Decision 2013-015-RBurse LeeNo ratings yet
- SKF Shaft Alignment Tool TKSA 41Document2 pagesSKF Shaft Alignment Tool TKSA 41Dwiki RamadhaniNo ratings yet
- LSL Education Center Final Exam 30 Minutes Full Name - Phone NumberDocument2 pagesLSL Education Center Final Exam 30 Minutes Full Name - Phone NumberDilzoda Boytumanova.No ratings yet
- 6 Uec ProgramDocument21 pages6 Uec Programsubramanyam62No ratings yet
- National Employment Policy, 2008Document58 pagesNational Employment Policy, 2008Jeremia Mtobesya0% (1)
- Vishal: Advanced Semiconductor Lab King Abdullah University of Science and Technology (KAUST) Thuwal, Saudi Arabia 23955Document6 pagesVishal: Advanced Semiconductor Lab King Abdullah University of Science and Technology (KAUST) Thuwal, Saudi Arabia 23955jose taboadaNo ratings yet
- Gmail - ICICI BANK I PROCESS HIRING FOR BACKEND - OPERATION PDFDocument2 pagesGmail - ICICI BANK I PROCESS HIRING FOR BACKEND - OPERATION PDFDeepankar ChoudhuryNo ratings yet