You might also like
- IBM Storage For IBM Z Level 1 Quiz - Attempt ReviewDocument15 pagesIBM Storage For IBM Z Level 1 Quiz - Attempt ReviewThang Nguyen100% (1)
- Test ExamplesDocument18 pagesTest ExamplesMuhammad Khaidhori100% (3)
- The Very Best Tubemate Youtube DownloaderDocument2 pagesThe Very Best Tubemate Youtube Downloadercointrain9No ratings yet
- VivadoHLS Overview PDFDocument43 pagesVivadoHLS Overview PDFAhmedAlazzawiNo ratings yet
- 2016 Fall Tutorial Intermediate Usage of Shared Compute Cluster SCCDocument82 pages2016 Fall Tutorial Intermediate Usage of Shared Compute Cluster SCCYashanshu GautamNo ratings yet
- Lec5-Adts 6upDocument4 pagesLec5-Adts 6upKapil KumarNo ratings yet
- INTRODUCTION TO DSP PROCESSORS Unit-5Document43 pagesINTRODUCTION TO DSP PROCESSORS Unit-5Nayab Rasool SKNo ratings yet
- Introduction To High-Level Synthesis With Vivado HLSDocument43 pagesIntroduction To High-Level Synthesis With Vivado HLSmdumar umarNo ratings yet
- Outline: - Next Assignment (A Homework) Given Out On MondayDocument10 pagesOutline: - Next Assignment (A Homework) Given Out On MondayJM MejiaNo ratings yet
- Citation/Export MLA Monika Rani Jha, Mr. Neeraj Gupta, Ms. Shruti Karkra*, “Variable Size 2D DCT with FPGA Implimentation”, May 17 Volume 5 Issue 5 , International Journal on Recent and Innovation Trends in Computing and Communication (IJRITCC), ISSN: 2321-8169, PP: 325 – 332 APA Monika Rani Jha, Mr. Neeraj Gupta, Ms. Shruti Karkra*, May 17 Volume 5 Issue 5, “Variable Size 2D DCT with FPGA Implimentation”, International Journal on Recent and Innovation Trends in Computing and Communication (IJRITCC), ISSN: 2321-8169, PP: 325 – 332Document8 pagesCitation/Export MLA Monika Rani Jha, Mr. Neeraj Gupta, Ms. Shruti Karkra*, “Variable Size 2D DCT with FPGA Implimentation”, May 17 Volume 5 Issue 5 , International Journal on Recent and Innovation Trends in Computing and Communication (IJRITCC), ISSN: 2321-8169, PP: 325 – 332 APA Monika Rani Jha, Mr. Neeraj Gupta, Ms. Shruti Karkra*, May 17 Volume 5 Issue 5, “Variable Size 2D DCT with FPGA Implimentation”, International Journal on Recent and Innovation Trends in Computing and Communication (IJRITCC), ISSN: 2321-8169, PP: 325 – 332Editor IJRITCCNo ratings yet
- Anand Raghunathan Raghunathan@purdue - Edu: ECE 695R: S - C DDocument10 pagesAnand Raghunathan Raghunathan@purdue - Edu: ECE 695R: S - C DAashishNo ratings yet
- Linear or Integer ProgrammingDocument12 pagesLinear or Integer Programminglaxmi mahtoNo ratings yet
- Web Seminar Stimulating Simulating 2 Uvm Sequences CspearDocument22 pagesWeb Seminar Stimulating Simulating 2 Uvm Sequences CspearAnh Dung LeNo ratings yet
- Classes PDFDocument32 pagesClasses PDFvineet agrawalNo ratings yet
- CSCI 104 Classes: Mark Redekopp David KempeDocument32 pagesCSCI 104 Classes: Mark Redekopp David KempeAsutosh MohapatraNo ratings yet
- Design and Implementation of Multi-Purpose DCT/DST-Specific Accelerator On Heterogeneous Multicore ArchitectureDocument10 pagesDesign and Implementation of Multi-Purpose DCT/DST-Specific Accelerator On Heterogeneous Multicore ArchitectureBanusha chandranNo ratings yet
- NEMOS System Components & Typical Procedures: Tutorial OutlineDocument42 pagesNEMOS System Components & Typical Procedures: Tutorial OutlinechemaMedNo ratings yet
- High LevelDocument29 pagesHigh LevelHemant SaraswatNo ratings yet
- Sehs3317 L5Document58 pagesSehs3317 L5李里奧No ratings yet
- Operator OverloadingDocument3 pagesOperator Overloadingapi-3697260No ratings yet
- Introduction To CUDA C 3Document67 pagesIntroduction To CUDA C 3Tarun RamNo ratings yet
- 05 CPD OpenMP Tasks Opt DebugDocument93 pages05 CPD OpenMP Tasks Opt DebugSebastian ChimalNo ratings yet
- L2: Introduction To Cuda: January 14, 2009Document27 pagesL2: Introduction To Cuda: January 14, 2009JM MejiaNo ratings yet
- Distributed UNIT 4Document15 pagesDistributed UNIT 4somayajula venkata srinivasNo ratings yet
- Automatically Converting C/ C++ To Opencl/Cuda: Introduction by David WilliamsDocument52 pagesAutomatically Converting C/ C++ To Opencl/Cuda: Introduction by David Williamscrazy_1No ratings yet
- Deep Clustering With Convolutional AutoencodersDocument10 pagesDeep Clustering With Convolutional AutoencodersFrancesco BNo ratings yet
- Scheduling, Binding and PipeliningDocument7 pagesScheduling, Binding and PipelininglitoduterNo ratings yet
- Introduction To Computer EngineeringDocument11 pagesIntroduction To Computer EngineeringNaveed Akhtar BalochNo ratings yet
- EE-307 Fpga Based System Design: Lecture # 02Document35 pagesEE-307 Fpga Based System Design: Lecture # 02Muhammad AnasNo ratings yet
- EE-307 Digital System Design: Lecture # 02Document35 pagesEE-307 Digital System Design: Lecture # 02Talha KhalidNo ratings yet
- Computer Programminggraphics: Prepare Plan For It Infrastructure Using Different Network Connecting DevicesDocument25 pagesComputer Programminggraphics: Prepare Plan For It Infrastructure Using Different Network Connecting DevicesPareshSukhiyaNo ratings yet
- 26 - Distributed Indexing Using MAP REDUCEDocument12 pages26 - Distributed Indexing Using MAP REDUCEgpswainNo ratings yet
- Introduction To System Design, VHDL BasicsDocument49 pagesIntroduction To System Design, VHDL BasicsantoniocljNo ratings yet
- 05 ThreadConceptDocument25 pages05 ThreadConceptshriyabedi17No ratings yet
- Cloud ComputingDocument36 pagesCloud Computingarjun singhNo ratings yet
- Unit 1dspaDocument95 pagesUnit 1dspaPanku RangareeNo ratings yet
- 4 - RISCV - AssemblyDocument37 pages4 - RISCV - AssemblyHassan AliNo ratings yet
- Os Module 2 21 Scheme NotesDocument23 pagesOs Module 2 21 Scheme NotesMudassir PashaNo ratings yet
- Vision MissionsDocument39 pagesVision MissionsRishabh MishraNo ratings yet
- Data Science and Predictive Analytics BiDocument44 pagesData Science and Predictive Analytics BiShayekh M ArifNo ratings yet
- Subject Code: Subject Name:: CS8391 Data StructuresDocument23 pagesSubject Code: Subject Name:: CS8391 Data StructuresSandeep RavikumarNo ratings yet
- 02 AbstractDataTypes 1Document29 pages02 AbstractDataTypes 1Juan PabloNo ratings yet
- Lecture 2: Introduction To PytorchDocument7 pagesLecture 2: Introduction To PytorchNilesh ChaudharyNo ratings yet
- Course Overview: Computer Architecture and OrganizationDocument38 pagesCourse Overview: Computer Architecture and Organizationdarwinvargas2011No ratings yet
- Dynamic Tracing For Exploitation and Fuzzing FinalDocument31 pagesDynamic Tracing For Exploitation and Fuzzing FinalXdaliteNo ratings yet
- Unit 2 - Chapter 2Document29 pagesUnit 2 - Chapter 2Pallavi BhartiNo ratings yet
- Networkx: Network Analysis With Python: Salvatore ScellatoDocument49 pagesNetworkx: Network Analysis With Python: Salvatore ScellatoAdam AsshidiqNo ratings yet
- Hardware Accelerated Convolutional Neural Networks For Synthetic Vision SystemsDocument4 pagesHardware Accelerated Convolutional Neural Networks For Synthetic Vision Systemsddatdh1No ratings yet
- Are SCADA Systems Off The ShelfDocument2 pagesAre SCADA Systems Off The ShelfdivinelightNo ratings yet
- Arch06 4Document21 pagesArch06 4BINARY TRADERNo ratings yet
- Custom Single Purpose Processor DesignDocument25 pagesCustom Single Purpose Processor DesignMhdNo ratings yet
- Panagiotis Famelis ThesisDocument35 pagesPanagiotis Famelis ThesisPanagiotis FamelisNo ratings yet
- Lec12 - SIMDDocument36 pagesLec12 - SIMDJane HeNo ratings yet
- Unit - Iv Tasks and LoadingDocument6 pagesUnit - Iv Tasks and Loadingdinesh9866119219No ratings yet
- 24 Vivado HLS IntroDocument34 pages24 Vivado HLS Introkarthikp207No ratings yet
- Lecture 4Document23 pagesLecture 4Kunal GuptaNo ratings yet
- Lecture 4Document23 pagesLecture 4Tanmaya Tapaswini TripathyNo ratings yet
- Lecture 4 - Source Code AnalysisDocument52 pagesLecture 4 - Source Code Analysisberlin.asd123No ratings yet
- Data Analytics Btma 636 Day 2Document144 pagesData Analytics Btma 636 Day 2Zhao ZhangNo ratings yet
- Spark ArchitectureDocument7 pagesSpark ArchitectureKRamakrishnaNo ratings yet
- Introduction To Programming (In C++) : VectorsDocument36 pagesIntroduction To Programming (In C++) : Vectorsyoussouf sehabiNo ratings yet
- 6 Logical EffortDocument5 pages6 Logical EffortNikhil Kumar JaiswalNo ratings yet
- Next-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsFrom EverandNext-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsNo ratings yet
- Dad - DS - 2Document7 pagesDad - DS - 2Prabhavathi PNo ratings yet
- 8 GraphDocument49 pages8 GraphPrabhavathi PNo ratings yet
- Lec9 - Logic SynthesisDocument26 pagesLec9 - Logic SynthesisPrabhavathi PNo ratings yet
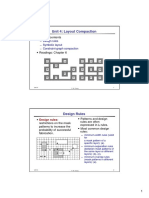
- Lec CompactionDocument15 pagesLec CompactionPrabhavathi PNo ratings yet
- Introduction, Design Flow, Algorithmic Level Analysis & Optimization, Architectural Level Estimation & SynthesisDocument35 pagesIntroduction, Design Flow, Algorithmic Level Analysis & Optimization, Architectural Level Estimation & SynthesisPrabhavathi PNo ratings yet
- LPVD I 2 2016 CopDocument30 pagesLPVD I 2 2016 CopPrabhavathi PNo ratings yet
- LPVD Vii PPR 2021Document64 pagesLPVD Vii PPR 2021Prabhavathi PNo ratings yet
- Sulfuric Acid Analyzers ComparisonDocument2 pagesSulfuric Acid Analyzers ComparisonEdwing William Salhuana MendozaNo ratings yet
- Protection Relays & Controls CatalogDocument164 pagesProtection Relays & Controls CatalogRichard BecerraNo ratings yet
- Utilities C - FSUTIL - 60 Certification Sample Questions With KeyDocument6 pagesUtilities C - FSUTIL - 60 Certification Sample Questions With KeyMadhukar Reddy SuramNo ratings yet
- NSE 4 Sample Exam 6Document22 pagesNSE 4 Sample Exam 6novalk23No ratings yet
- Unit-3 - Function Generator Using IC 8038Document10 pagesUnit-3 - Function Generator Using IC 8038yp2401553No ratings yet
- Kindly Motor: KR50/KC50-33G SeriesDocument1 pageKindly Motor: KR50/KC50-33G SeriesAsalAjaNo ratings yet
- TBOX 2012 - en v3.0 DatasheetDocument2 pagesTBOX 2012 - en v3.0 DatasheetTarik RayanNo ratings yet
- ABB MotorsDocument30 pagesABB MotorslifttecNo ratings yet
- Motocultivadores Diesel Kipor Kdt910ca Kdt910eDocument25 pagesMotocultivadores Diesel Kipor Kdt910ca Kdt910eМарцис Гасунс100% (1)
- Stud WB Sna II HP UxDocument640 pagesStud WB Sna II HP UxDhanush DhyanNo ratings yet
- Piston Assembly, Skirt and Ring RTA-72Document6 pagesPiston Assembly, Skirt and Ring RTA-72rafaelNo ratings yet
- DMX6800+AnalogAESDemuxEdC - 175 000196 00Document78 pagesDMX6800+AnalogAESDemuxEdC - 175 000196 00Techne PhobosNo ratings yet
- Barclay Form FileDocument3 pagesBarclay Form Fileabubeker omerNo ratings yet
- PRO Series 100 - 400V2 Pre-Service and Calibration Manual: (Models 110 - 410)Document42 pagesPRO Series 100 - 400V2 Pre-Service and Calibration Manual: (Models 110 - 410)quankddNo ratings yet
- How The Active Directory Replication Model Works - Active DirectoryDocument26 pagesHow The Active Directory Replication Model Works - Active Directorypriya_psalmsNo ratings yet
- 9 4 Logic GatesDocument12 pages9 4 Logic Gatessuemozac100% (3)
- Minimum Vs Average Wall Tubes & Why It Matters - Elliott ToolDocument3 pagesMinimum Vs Average Wall Tubes & Why It Matters - Elliott ToolErsonNo ratings yet
- HS MeritList 2018 19 PDFDocument29 pagesHS MeritList 2018 19 PDFBANSURI PODDARNo ratings yet
- Bibliographic Review and Comparison of Optimal Sizing Methods For Hybrid Renewable Energy SystemsDocument15 pagesBibliographic Review and Comparison of Optimal Sizing Methods For Hybrid Renewable Energy Systemsarmen.karimi.1994No ratings yet
- Sandvik Wx7000 Tensioned Screening MediaDocument6 pagesSandvik Wx7000 Tensioned Screening MediaLachezar VelkovNo ratings yet
- DevOps Training in KukatpallyDocument4 pagesDevOps Training in KukatpallyComputech InfoSolutions100% (1)
- TMF190 eSRSEmployerEnrollmentForm V04 PDFDocument1 pageTMF190 eSRSEmployerEnrollmentForm V04 PDFCecilia IntalNo ratings yet
- PC40MR 2 MRX 2 PC50MR 2 MRX 2. Operation Maintenance ManualDocument265 pagesPC40MR 2 MRX 2 PC50MR 2 MRX 2. Operation Maintenance ManualSul FadliNo ratings yet
- E32-433T30D User Manual: Sx1278 433Mhz 1W Dip Wireless ModuleDocument21 pagesE32-433T30D User Manual: Sx1278 433Mhz 1W Dip Wireless ModuleJavier MainarNo ratings yet
- Navi-Planner 4000: Quick Guide Chart HandlingDocument26 pagesNavi-Planner 4000: Quick Guide Chart HandlingPanagiotis MouzenidisNo ratings yet
- 70 - PDF - Glass - House - Et - 09082014Document3 pages70 - PDF - Glass - House - Et - 09082014HahuNo ratings yet