You might also like
- RS 485 Still The Most Robust CommunicationDocument12 pagesRS 485 Still The Most Robust Communicationelengineer100% (1)
- Battery-Powered RS-232 To RS-422/485 Converter: Model 485BAT3Document2 pagesBattery-Powered RS-232 To RS-422/485 Converter: Model 485BAT3Ágost VitaNo ratings yet
- Unit-4: A/D and D/A ConvertersDocument27 pagesUnit-4: A/D and D/A ConvertersStuti GandhiNo ratings yet
- Industrial DIN Rail Mounted Optically Isolated RS-232 To RS-422/485 ConverterDocument3 pagesIndustrial DIN Rail Mounted Optically Isolated RS-232 To RS-422/485 ConverterÁgost VitaNo ratings yet
- 10-Bit 60 MSPSDocument12 pages10-Bit 60 MSPSlucas_guerrero2No ratings yet
- 4 Channel RF Remote PDFDocument2 pages4 Channel RF Remote PDFRohit ParmarNo ratings yet
- R/2R Ladder Networks: Application Note AFD006Document5 pagesR/2R Ladder Networks: Application Note AFD006aditya_vyas_13No ratings yet
- Otis Adapter1 RS232Document2 pagesOtis Adapter1 RS232jimmy pNo ratings yet
- Problem Set 2 Solutions: D D R R R R R R R R R R R R A R R/2 R R/2 BDocument7 pagesProblem Set 2 Solutions: D D R R R R R R R R R R R R A R R/2 R R/2 BIttyNo ratings yet
- SN65HVD485E Half-Duplex RS-485 Transceiver: 1 Features 3 DescriptionDocument29 pagesSN65HVD485E Half-Duplex RS-485 Transceiver: 1 Features 3 DescriptionyamilNo ratings yet
- SN 65 HVD 485 eDocument29 pagesSN 65 HVD 485 eAkhilNo ratings yet
- +3 V, Dual, Serial Input 12-/10-Bit Dacs: Ma/Dac Ma Typical Power ShutdownDocument12 pages+3 V, Dual, Serial Input 12-/10-Bit Dacs: Ma/Dac Ma Typical Power ShutdownCarlos TibussiNo ratings yet
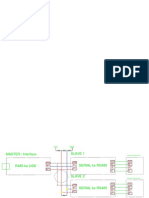
- MASTER / Interface Slave 1: GND DE DI RE B (+) A (-) GND RO REDocument1 pageMASTER / Interface Slave 1: GND DE DI RE B (+) A (-) GND RO REalfianNo ratings yet
- BI Technologies R2R Resistor Ladder NetworksDocument6 pagesBI Technologies R2R Resistor Ladder NetworksRianKunNo ratings yet
- 485LDRC DRC-4003dsDocument3 pages485LDRC DRC-4003dslunatiko21No ratings yet
- DME DMEIAU617 Webinar1 v1Document42 pagesDME DMEIAU617 Webinar1 v1Manisha PatelNo ratings yet
- 01 - ISSN - 1392-1215 - Analysis of Balancing Methods of Measurement of Small Resistance ChangesDocument4 pages01 - ISSN - 1392-1215 - Analysis of Balancing Methods of Measurement of Small Resistance Changescuco777No ratings yet
- D D D D D D D D: DescriptionDocument20 pagesD D D D D D D D: Descriptionwaleed hsaneenNo ratings yet
- SN65HVD75Document39 pagesSN65HVD75sas999333No ratings yet
- SN 65 HVD 3082 eDocument39 pagesSN 65 HVD 3082 eIgnacio Romero ANo ratings yet
- Dac & AdcDocument108 pagesDac & AdcG RAJESHNo ratings yet
- Proj 15Document6 pagesProj 15Manoj KumarNo ratings yet
- Annex 10 Volume IDocument600 pagesAnnex 10 Volume Iสรสิช อ๊อด อ๊อดNo ratings yet
- Annex10 1 PDFDocument303 pagesAnnex10 1 PDFLong LêNo ratings yet
- SN 65 Als 176Document16 pagesSN 65 Als 176atomo atomoNo ratings yet
- Lecture 06Document6 pagesLecture 06Putu Ayu SaraswatiNo ratings yet
- Cable Pinouts: SRP I/O ModuleDocument8 pagesCable Pinouts: SRP I/O Moduledenilson.rodr1357No ratings yet
- Snx5Hvd308Xe Low-Power Rs-485 Transceivers: 1 FeaturesDocument37 pagesSnx5Hvd308Xe Low-Power Rs-485 Transceivers: 1 Featuresferreirabarbo93065gmail.com BarboNo ratings yet
- Sep-603b-Reb 670Document159 pagesSep-603b-Reb 670RK KNo ratings yet
- Transio A52 A53 QIG v8Document2 pagesTransio A52 A53 QIG v8Jan Der VarNo ratings yet
- DSA00496247Document15 pagesDSA00496247EvaNo ratings yet
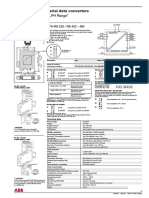
- RS232 To RS485 Converter ABBDocument1 pageRS232 To RS485 Converter ABBmohamedNo ratings yet
- DME DMEIAU617 Pre-Recording1 v1Document38 pagesDME DMEIAU617 Pre-Recording1 v1Manisha PatelNo ratings yet
- AN1348 Application Note: St485: An Rs-485 Based Interface With Lower Data Bit ErrorsDocument7 pagesAN1348 Application Note: St485: An Rs-485 Based Interface With Lower Data Bit Errorsiridium2000No ratings yet
- Auto Cart RobotDocument18 pagesAuto Cart RobotPrashant TanwarNo ratings yet
- R L C V I R L C R L C I - T: G 2 S T D 2 SDocument1 pageR L C V I R L C R L C I - T: G 2 S T D 2 SBrijendra SinghNo ratings yet
- D D D D D D D D D D: SN75179B Differential Driver and Receiver PairDocument9 pagesD D D D D D D D D D: SN75179B Differential Driver and Receiver PairSamuel White RospigliozziNo ratings yet
- XP652Document1 pageXP652haniballkinga2778No ratings yet
- Terminal RJ-45 To RJ-45 Rollover CableDocument1 pageTerminal RJ-45 To RJ-45 Rollover CableРуслан КапетингNo ratings yet
- CPC 2006-9702 07 Final SkimDocument24 pagesCPC 2006-9702 07 Final Skimhen434No ratings yet
- IC200ACC415 DS RS232 RS485 Interface Adapter VersaMaxMicroNano GFK1834 2002Document1 pageIC200ACC415 DS RS232 RS485 Interface Adapter VersaMaxMicroNano GFK1834 2002jav_08No ratings yet
- The RS-485 Design Guide: Application ReportDocument9 pagesThe RS-485 Design Guide: Application ReportraghuNo ratings yet
- Star &delta ConnectionDocument4 pagesStar &delta ConnectionRali sp college DumkaNo ratings yet
- Dual-Port Memory Block Diagram PDFDocument8 pagesDual-Port Memory Block Diagram PDFivanramljakNo ratings yet
- Dual-Port Memory Block Diagram PDFDocument8 pagesDual-Port Memory Block Diagram PDFivanramljakNo ratings yet
- Enda Econ-485 Usb/Rs 485 - Rs 422 Converter: Technical SpecificationsDocument2 pagesEnda Econ-485 Usb/Rs 485 - Rs 422 Converter: Technical SpecificationskaihaniNo ratings yet
- DF GTU Study Material Presentations Unit-4Document25 pagesDF GTU Study Material Presentations Unit-4bhavanitelecom123No ratings yet
- This Is It: RC TreeDocument4 pagesThis Is It: RC TreeItsy BitsyNo ratings yet
- ATC-105 User's ManualDocument0 pagesATC-105 User's ManualMaitry Shah100% (1)
- 3 V/5 V, Rail-to-Rail Quad, 8-Bit DAC AD7304/AD7305: Features Functional Block DiagramsDocument20 pages3 V/5 V, Rail-to-Rail Quad, 8-Bit DAC AD7304/AD7305: Features Functional Block DiagramsAvs ElectronNo ratings yet
- Delta DVP PLC Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualDocument2 pagesDelta DVP PLC Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualryoNo ratings yet
- Ads 7870Document44 pagesAds 7870SAIKAT KUMAR JANA ee14d208No ratings yet
- Matsushita FP PLC Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualDocument2 pagesMatsushita FP PLC Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualryoNo ratings yet
- 25.primavera & Ms Project Workbook - Civil & MechDocument21 pages25.primavera & Ms Project Workbook - Civil & Mechikreddy75% (4)
- Koyo K-Sequence Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualDocument3 pagesKoyo K-Sequence Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualryoNo ratings yet
- Strong Fet™ Irfb7545Pbf: Application V 60V R Typ. 4.9M Max 5.9M I 95ADocument10 pagesStrong Fet™ Irfb7545Pbf: Application V 60V R Typ. 4.9M Max 5.9M I 95Aejdigger ejNo ratings yet
- Drill Pipe Drill StringDocument11 pagesDrill Pipe Drill StringRodrigoBernardo50% (2)
- Determinants of Profitability Performance: An Analysis of Class I Railroads in The United StatesDocument18 pagesDeterminants of Profitability Performance: An Analysis of Class I Railroads in The United StatesJayaniNo ratings yet
- Isothermal Heat Treatment PDFDocument6 pagesIsothermal Heat Treatment PDFsmani170No ratings yet
- User ManualDocument91 pagesUser ManualJorge Luis SoriaNo ratings yet
- Reflective Lesson Plan 4 Pythagorean TheoremDocument9 pagesReflective Lesson Plan 4 Pythagorean Theoremapi-339897912100% (1)
- JCrenshaw ImplementingCRCsDocument17 pagesJCrenshaw ImplementingCRCsspyeagleNo ratings yet
- 2.8 Weight 2023Document13 pages2.8 Weight 2023Xinpei ShimNo ratings yet
- 10023890ifu Cedia Csa Low Range DXC 700 Au enDocument4 pages10023890ifu Cedia Csa Low Range DXC 700 Au enRodas GetachewNo ratings yet
- Correlational ResearchDocument10 pagesCorrelational ResearchSari100% (1)
- Question Report - 11Document17 pagesQuestion Report - 11Suryakant AgrawalNo ratings yet
- AI Lab Assignment: Q4. Implementation of 8 Queens ProblemDocument8 pagesAI Lab Assignment: Q4. Implementation of 8 Queens ProblemSajag ChauhanNo ratings yet
- Module 1Document45 pagesModule 1Leigh Kyster BenlotNo ratings yet
- Mechanics of Solids by Crandall, Dahl, Lardner, 2nd ChapterDocument118 pagesMechanics of Solids by Crandall, Dahl, Lardner, 2nd Chapterpurijatin100% (2)
- Mep - July 2013 - January 2010Document47 pagesMep - July 2013 - January 2010sunchit1986No ratings yet
- MS Excel FunctionsDocument3 pagesMS Excel FunctionsRocket4No ratings yet
- 5Document20 pages5AndriansyahNo ratings yet
- Physics 01-Introduction and Kinematics (2018) LabDocument91 pagesPhysics 01-Introduction and Kinematics (2018) LabcedNo ratings yet
- Electrical BEE Latest 2022 2023 Quantum Series (Searchable)Document116 pagesElectrical BEE Latest 2022 2023 Quantum Series (Searchable)ritamlyrisNo ratings yet
- Dataram RAMDisk Users ManualDocument20 pagesDataram RAMDisk Users ManualBabis ArbiliosNo ratings yet
- Sam W Hoke Torch PatentDocument5 pagesSam W Hoke Torch PatentRichard.nlNo ratings yet
- Worksheet 7-g6 MATHSDocument2 pagesWorksheet 7-g6 MATHSAhmedAR or main emailNo ratings yet
- 10th National ISMO Class 5 Question PaperDocument10 pages10th National ISMO Class 5 Question Paperwhatever50% (2)
- Lab 3Document8 pagesLab 3TOP 5 GHOSTNo ratings yet
- Introduction To Software TestingDocument42 pagesIntroduction To Software TestingRoxanaNo ratings yet
- Installation Guide VAMP 221-MCSet - V4Document16 pagesInstallation Guide VAMP 221-MCSet - V4cokicisneNo ratings yet
- Pick and Place Robotic Arm Controlled by Computer - TJ211.42.M52 2007 - Mohamed Naufal B. OmarDocument26 pagesPick and Place Robotic Arm Controlled by Computer - TJ211.42.M52 2007 - Mohamed Naufal B. OmarSAMNo ratings yet
- Janitza-Main catalogue-2015-ENDocument418 pagesJanitza-Main catalogue-2015-ENOchoa Para La BandaNo ratings yet
- Spe Math p2 Revision Yr7Document24 pagesSpe Math p2 Revision Yr7Hadizah JulaihiNo ratings yet
- Sony HCD Zx30avDocument80 pagesSony HCD Zx30avrrobles8777No ratings yet
- Third Periodic TestDocument4 pagesThird Periodic TestCrizelda AmarentoNo ratings yet