You might also like
- Raupov 2022 IOP Conf. Ser. Earth Environ. Sci. 1021 012077Document8 pagesRaupov 2022 IOP Conf. Ser. Earth Environ. Sci. 1021 012077luisNo ratings yet
- FEM Modelling Two Phase Fluid FlowDocument12 pagesFEM Modelling Two Phase Fluid FlowHassan ShahNo ratings yet
- IOP Conference Series: Earth and Environmental Science - Evaluation on Water Block in Low Permeability FormationsDocument9 pagesIOP Conference Series: Earth and Environmental Science - Evaluation on Water Block in Low Permeability FormationsTeresa Espada PadillaNo ratings yet
- Enhancing Oil Recovery Using Nanoparticles: Supervisors: Prof. Paul W.J. GloverDocument4 pagesEnhancing Oil Recovery Using Nanoparticles: Supervisors: Prof. Paul W.J. GloverAkpevweoghene Kelvin IdogunNo ratings yet
- Rod Lift Offshore SafetyDocument7 pagesRod Lift Offshore SafetyMohamed GhareebNo ratings yet
- Design and testing of an oil-based pressure-compensated underwater hydraulic systemDocument12 pagesDesign and testing of an oil-based pressure-compensated underwater hydraulic systemGanesh ChodisettiNo ratings yet
- A Study To Minimise Bottomw Water Coning in Heavy Oil ReservoirsDocument11 pagesA Study To Minimise Bottomw Water Coning in Heavy Oil Reservoirssaladinayubi1234No ratings yet
- Chinese Journal of Chemical Engineering: Jin Lang, Jiao ZhaoDocument8 pagesChinese Journal of Chemical Engineering: Jin Lang, Jiao ZhaoLydia DAHMOUNNo ratings yet
- Chinese Journal of Chemical Engineering: Jin Lang, Jiao ZhaoDocument8 pagesChinese Journal of Chemical Engineering: Jin Lang, Jiao ZhaoLydia DAHMOUNNo ratings yet
- The Ternary Combination of Polymer Gel, Microsphere and SurfactantDocument16 pagesThe Ternary Combination of Polymer Gel, Microsphere and SurfactantKamran KhanNo ratings yet
- Numerical Simulation Study On Drift and Diffusion of Dalian Oil SpillDocument10 pagesNumerical Simulation Study On Drift and Diffusion of Dalian Oil SpillSanjanaMustafizBonnyNo ratings yet
- Joni U Duplim EmulzijamsDocument8 pagesJoni U Duplim EmulzijamsMarceta BrankicaNo ratings yet
- The Simulation of Free Surface Flows With ComputatDocument14 pagesThe Simulation of Free Surface Flows With ComputatHigor Pereira de OliveiraNo ratings yet
- Heavy and Thermal Oil Recovery Production MechanismsDocument17 pagesHeavy and Thermal Oil Recovery Production MechanismsAndrea MendozaNo ratings yet
- Wettability ThesisDocument6 pagesWettability Thesisbsend5zk100% (1)
- Upstream Operations in The Oil Industry Rigorous MDocument12 pagesUpstream Operations in The Oil Industry Rigorous MShakerMahmoodNo ratings yet
- Spe 209716 MsDocument20 pagesSpe 209716 MsDiego PalaciosNo ratings yet
- Li 2021Document21 pagesLi 2021yogaNo ratings yet
- Modeling IPRDocument19 pagesModeling IPRfreelancer2earnNo ratings yet
- Comprehensive Review of Alkaline - Surfactant-Polymer (ASP) - Enhanced Oil Recovery (EOR)Document16 pagesComprehensive Review of Alkaline - Surfactant-Polymer (ASP) - Enhanced Oil Recovery (EOR)Vijay KumargodaraNo ratings yet
- Groot - Field-Scale Modelling and Sensitivity Analysis of DME EnhancedDocument22 pagesGroot - Field-Scale Modelling and Sensitivity Analysis of DME EnhancedAllah BakhshNo ratings yet
- SPE 29907 Development and Application of The Water Control and Profile Modification Technology in China Oil FieldsDocument31 pagesSPE 29907 Development and Application of The Water Control and Profile Modification Technology in China Oil FieldsMemar AliNo ratings yet
- A Novel Approach To Reservoir Simulation of Hydraulic Fractures Performance Improvement Using Pseudo Well Connections - A Lokhandwala Et Al. 2022Document11 pagesA Novel Approach To Reservoir Simulation of Hydraulic Fractures Performance Improvement Using Pseudo Well Connections - A Lokhandwala Et Al. 2022AgathaNo ratings yet
- Evaluation of Water Ooding Experimental and Simulation OverviewDocument19 pagesEvaluation of Water Ooding Experimental and Simulation OverviewAminNo ratings yet
- Tongyu Zhu 2022. Advances of Microemulsion and Its Applications For Improved Oil RecoveryDocument18 pagesTongyu Zhu 2022. Advances of Microemulsion and Its Applications For Improved Oil RecoverymadadmrdNo ratings yet
- Chapter One - EditedDocument7 pagesChapter One - EditedTerryNo ratings yet
- Article 9Document8 pagesArticle 9BAÏ NGUIRA-ANo ratings yet
- A Review On The Hydrodynamic Characteristics of Autonomous Underwater VehiclesDocument15 pagesA Review On The Hydrodynamic Characteristics of Autonomous Underwater VehiclesPrasad PatilNo ratings yet
- Idahor Chap1Document7 pagesIdahor Chap1TerryNo ratings yet
- Facilitating The Transportation of Highly Viscous Oil by Aqueous Foam InjectionDocument17 pagesFacilitating The Transportation of Highly Viscous Oil by Aqueous Foam InjectionSahin İmanovNo ratings yet
- Hydraulic Fracturing Candidate-Well Selection Using Artificial Intelligence ApproachDocument7 pagesHydraulic Fracturing Candidate-Well Selection Using Artificial Intelligence ApproachLydiaNo ratings yet
- Syfan 2018Document24 pagesSyfan 201810_DAVID_10No ratings yet
- Review Article Preparation and Applications of The Cellulose NanocrystalDocument11 pagesReview Article Preparation and Applications of The Cellulose NanocrystalAathira AjeeshNo ratings yet
- Alter Ego 1 EleveDocument8 pagesAlter Ego 1 EleveNiicolas EscobarrNo ratings yet
- VIII Pump fabrication1-s2.0-S092442471000049X-mainDocument5 pagesVIII Pump fabrication1-s2.0-S092442471000049X-mainrajaram huptaNo ratings yet
- Spe 188226 MSDocument15 pagesSpe 188226 MSDAYANG NUR SYAZANA AG BUHTAMAMNo ratings yet
- IPTC-19959-MS A New Well Selection Method Based On Improved Pressure Index For Polymer FloodingDocument9 pagesIPTC-19959-MS A New Well Selection Method Based On Improved Pressure Index For Polymer FloodingDe GuyNo ratings yet
- Spe 145027 MSDocument6 pagesSpe 145027 MSShahad KhadadaNo ratings yet
- Robust Optimization of Oil Reservoir Flooding, Van Essen Et Al, 2006, 7 PgsDocument7 pagesRobust Optimization of Oil Reservoir Flooding, Van Essen Et Al, 2006, 7 PgsjoreliNo ratings yet
- Samsudin 2015 IOP Conf. Ser. Mater. Sci. Eng. 88 012024Document7 pagesSamsudin 2015 IOP Conf. Ser. Mater. Sci. Eng. 88 012024Shino UlahannanNo ratings yet
- Gas Wettability of Reservoir Rock Surfaces with Porous MediaFrom EverandGas Wettability of Reservoir Rock Surfaces with Porous MediaNo ratings yet
- Electro CoalescenciaDocument7 pagesElectro CoalescenciaiqubaldoNo ratings yet
- Downhole Water Sink Method for Preventing Water Coning and CrestingDocument21 pagesDownhole Water Sink Method for Preventing Water Coning and CrestingSinaNo ratings yet
- Hybrid Enhanced Oil RecoveryDocument41 pagesHybrid Enhanced Oil Recoveryintelligent207No ratings yet
- FM Nptel MergedDocument214 pagesFM Nptel MergedU SANKAR TEJONo ratings yet
- Shi 2020 IOP Conf. Ser. Earth Environ. Sci. 555 012010Document9 pagesShi 2020 IOP Conf. Ser. Earth Environ. Sci. 555 012010wqeqwNo ratings yet
- How To Increase Hydrocarbon Recovery EffeciencyDocument11 pagesHow To Increase Hydrocarbon Recovery EffeciencyjackNo ratings yet
- LocaljournalDocument11 pagesLocaljournalIgbereyivwe TejiriNo ratings yet
- Fenrg 10 1005749Document8 pagesFenrg 10 1005749Precious OluwadahunsiNo ratings yet
- Failure and Mitigation Study of Packer in The Deepwater HTHP Gas Well Considering The Temperature-Pressure Effect During Well Completion TestDocument14 pagesFailure and Mitigation Study of Packer in The Deepwater HTHP Gas Well Considering The Temperature-Pressure Effect During Well Completion TestTiannan DengNo ratings yet
- 1 s2.0 S2095809922007081 MainDocument19 pages1 s2.0 S2095809922007081 MainkendlpNo ratings yet
- Chemical Engineering Journal: A A A BDocument7 pagesChemical Engineering Journal: A A A BnmnmnmNo ratings yet
- Computational Study of Heavy Oil Production with ICDsDocument8 pagesComputational Study of Heavy Oil Production with ICDsXagustNo ratings yet
- Experimental studyDocument19 pagesExperimental studyNida AkNo ratings yet
- Cat 3Document13 pagesCat 3Sebastian LopezNo ratings yet
- Feart 09 825253Document10 pagesFeart 09 825253Saber daboussiNo ratings yet
- Hydraulic Bench Flow RateDocument9 pagesHydraulic Bench Flow RateJudith LacapNo ratings yet
- SPE-174935-MS Offshore Membrane Deaeration As A Replacement For Vacuum Tower Deaeration - A Comparative StudyDocument15 pagesSPE-174935-MS Offshore Membrane Deaeration As A Replacement For Vacuum Tower Deaeration - A Comparative StudyShamsiNo ratings yet
- Sukarno 2021 IOP Conf. Ser. Earth Environ. Sci. 927 012046Document9 pagesSukarno 2021 IOP Conf. Ser. Earth Environ. Sci. 927 012046diah hidayantiNo ratings yet
- CFD Simulation of Hydraulic Tank: SciencedirectDocument6 pagesCFD Simulation of Hydraulic Tank: SciencedirectCristian Camilo Aguirre MarquezNo ratings yet
- Energies 14 02463Document17 pagesEnergies 14 02463RoberticoZeaNo ratings yet
- Kjs 33 Aliattia 15Document9 pagesKjs 33 Aliattia 15RoberticoZeaNo ratings yet
- Ijeit1412202112 01Document5 pagesIjeit1412202112 01RoberticoZeaNo ratings yet
- Fernandes Et Al 2023 01Document16 pagesFernandes Et Al 2023 01RoberticoZeaNo ratings yet
- Filtration Law For Polymer Flow ThroughDocument22 pagesFiltration Law For Polymer Flow ThroughRoberticoZeaNo ratings yet
- Hashemizadeh 2014Document7 pagesHashemizadeh 2014RoberticoZeaNo ratings yet
- Flow in Porous Media and Environmental ImpactDocument81 pagesFlow in Porous Media and Environmental ImpactRoberticoZeaNo ratings yet
- Hopf Cole BrownDocument21 pagesHopf Cole BrownRoberticoZeaNo ratings yet
- Utilizing hydrogen from water splitting for oil burner combustionDocument2 pagesUtilizing hydrogen from water splitting for oil burner combustionRoberticoZeaNo ratings yet
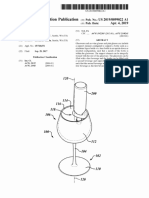
- United States: (12) Patent Application Publication (10) Pub - No .: US 2019 / 0099022 A1Document16 pagesUnited States: (12) Patent Application Publication (10) Pub - No .: US 2019 / 0099022 A1RoberticoZeaNo ratings yet
- Lambert 2019Document14 pagesLambert 2019RoberticoZeaNo ratings yet
- Magnetohydrodynamic Boundary Layer Flow of Nanofluid Over An Exponentially Stretching Permeable SheetDocument13 pagesMagnetohydrodynamic Boundary Layer Flow of Nanofluid Over An Exponentially Stretching Permeable SheetRoberticoZeaNo ratings yet
- Developing a South Tunisian Field and Analyzing Well Test ResultsDocument88 pagesDeveloping a South Tunisian Field and Analyzing Well Test ResultsRoberticoZeaNo ratings yet
- Acsomega 1c02850Document11 pagesAcsomega 1c02850RoberticoZeaNo ratings yet
- The Effect of Magnetohydrodynamic Nano Fluid Flow Through Porous CylinderDocument11 pagesThe Effect of Magnetohydrodynamic Nano Fluid Flow Through Porous CylinderRoberticoZeaNo ratings yet
- On The Study of Viscous Fluid Due To Exponentially Shrinking Sheet in The Presence of Thermal RadiationDocument6 pagesOn The Study of Viscous Fluid Due To Exponentially Shrinking Sheet in The Presence of Thermal RadiationRoberticoZeaNo ratings yet
- SPE93879Document12 pagesSPE93879RoberticoZeaNo ratings yet
- Rspa 1961 0014Document12 pagesRspa 1961 0014RoberticoZeaNo ratings yet
- Solution of Falkner - Skan Unsteady MHD Boundary Layer Flow and Heat Transfer Past A Moving Porous Wedge in A NanofluidDocument7 pagesSolution of Falkner - Skan Unsteady MHD Boundary Layer Flow and Heat Transfer Past A Moving Porous Wedge in A NanofluidRoberticoZeaNo ratings yet
- Soret Effect On Stagnation Point Flow PaDocument15 pagesSoret Effect On Stagnation Point Flow PaRoberticoZeaNo ratings yet
- MHD Boundary Layer Flow of Casson Fluid Passing Through An Exponentially Stretching Permeable Surface With Thermal RadiationDocument9 pagesMHD Boundary Layer Flow of Casson Fluid Passing Through An Exponentially Stretching Permeable Surface With Thermal RadiationRoberticoZeaNo ratings yet
- LOCAL NON-SIMILARITYDocument16 pagesLOCAL NON-SIMILARITYRoberticoZeaNo ratings yet
- MFM 15 6Document28 pagesMFM 15 6RoberticoZeaNo ratings yet
- Imagining The Age of Oil: Case Studies in British Petrocultures, 1865-1935Document286 pagesImagining The Age of Oil: Case Studies in British Petrocultures, 1865-1935RoberticoZeaNo ratings yet
- Approximate Solutions For Steady Boundary Layer MHD Viscous Flow and Radiative Heat Transfer Over An Exponentially Porous Stretching SheetDocument13 pagesApproximate Solutions For Steady Boundary Layer MHD Viscous Flow and Radiative Heat Transfer Over An Exponentially Porous Stretching SheetRoberticoZeaNo ratings yet
- Flow of Particulate-Fluid Suspension in A Channel With Porous WallsDocument27 pagesFlow of Particulate-Fluid Suspension in A Channel With Porous WallsRoberticoZeaNo ratings yet
- Principles of The Unsaturated Flow and Their Appl-Wageningen University and Research 507186Document27 pagesPrinciples of The Unsaturated Flow and Their Appl-Wageningen University and Research 507186RoberticoZeaNo ratings yet
- The velocity profile of laminar MHD flowsDocument12 pagesThe velocity profile of laminar MHD flowsRoberticoZeaNo ratings yet
- Vol51 04 229Document11 pagesVol51 04 229RoberticoZeaNo ratings yet
- Che 302 - Q1Document2 pagesChe 302 - Q1Khiara Claudine EspinosaNo ratings yet
- Instalatii FrigorificeDocument684 pagesInstalatii Frigorificedanutprintisorul0% (1)
- Hydraulics FestoDocument232 pagesHydraulics FestoCHRISTOPHER100% (10)
- Gas Laws WorksheetDocument8 pagesGas Laws WorksheetGiorno GiovannaNo ratings yet
- 3.3.1 Filter Feed PumpDocument2 pages3.3.1 Filter Feed PumpSri UtomoNo ratings yet
- HydraulicsLibraryTutorial PDFDocument104 pagesHydraulicsLibraryTutorial PDFAnonymous Hy5Ir9QX100% (1)
- EXP3 - To Verify Boyle's Law ExperimentallyDocument7 pagesEXP3 - To Verify Boyle's Law Experimentallyمتي سلوان متيNo ratings yet
- NCEP WRF Post Processor User GuideDocument8 pagesNCEP WRF Post Processor User GuidebehrouzYariNo ratings yet
- Thrust Block For Pipelines - Case Study of Water Sup-Ply Scheme For A Town BerinagDocument6 pagesThrust Block For Pipelines - Case Study of Water Sup-Ply Scheme For A Town BerinagsatyamNo ratings yet
- Physics Question Set - 082544Document8 pagesPhysics Question Set - 082544Abu Syeed Md. Aurangzeb Al MasumNo ratings yet
- Catalogo Instrumentacion WirelessDocument4 pagesCatalogo Instrumentacion WirelessAlexander Ariza NadjarNo ratings yet
- Sigma Delta Vaporizer User Instruction Manual: Quality and Assurance in AnaesthesiaDocument67 pagesSigma Delta Vaporizer User Instruction Manual: Quality and Assurance in AnaesthesiaVinícius Freitas CamiloNo ratings yet
- Centrifugal PumpDocument41 pagesCentrifugal PumpAbdallah MansourNo ratings yet
- SMC SilencersDocument6 pagesSMC SilencersZachary NgNo ratings yet
- Basic Vacuum Theory PDFDocument17 pagesBasic Vacuum Theory PDFada guevarraNo ratings yet
- Civil engineering 250 Civil Engineer Interview Questions and Answers asked in Top CompaniesDocument35 pagesCivil engineering 250 Civil Engineer Interview Questions and Answers asked in Top CompaniesSrikanth SrikanthNo ratings yet
- Derivation of The Boussinesq ApproximationDocument4 pagesDerivation of The Boussinesq ApproximationShamoon JamshedNo ratings yet
- Feb 8 WeekDocument51 pagesFeb 8 WeekMohammad Iqbal Mahamad Amir100% (2)
- Astm D1250Document3 pagesAstm D1250EngrFaisal0% (1)
- MDT Sampling Training Guide for Formation EvaluationDocument6 pagesMDT Sampling Training Guide for Formation EvaluationVanVietRoanNo ratings yet
- VESSEL SPECIFICATION FOR OVERHEAD ACCUMULATORDocument2 pagesVESSEL SPECIFICATION FOR OVERHEAD ACCUMULATORMustafa AhsanNo ratings yet
- DSH CatalogueDocument20 pagesDSH Catalogueनिखिल बायवारNo ratings yet
- Gas-Lift Workshop Technical Presentations ReviewDocument23 pagesGas-Lift Workshop Technical Presentations ReviewsatyendraNo ratings yet
- Experiment 3 Center of Pressure: Asst - Lectuer: Mohammed Abid JameelDocument6 pagesExperiment 3 Center of Pressure: Asst - Lectuer: Mohammed Abid JameelbalsamNo ratings yet
- Physics Semester 1 Review (1-3, 5-6)Document10 pagesPhysics Semester 1 Review (1-3, 5-6)xyzabcNo ratings yet
- Fluid Sealing Standards For NMEJ StandardsDocument9 pagesFluid Sealing Standards For NMEJ Standardsamol1321No ratings yet
- Kki Series 73Document18 pagesKki Series 73kglorstadNo ratings yet
- Fluid Flow Theory Energy LossesDocument6 pagesFluid Flow Theory Energy LossesAlexander MugabeNo ratings yet
- C711 PDS2Document5 pagesC711 PDS2Jitendra ChaudhariNo ratings yet
- Mechanics Assignment IIT KGP.Document2 pagesMechanics Assignment IIT KGP.AsmitSachanNo ratings yet