You might also like
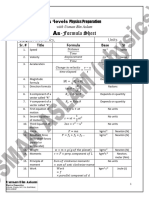
- AS Levels Formula Sheet-Converted-1Document5 pagesAS Levels Formula Sheet-Converted-1Muhammad Umar FarooqNo ratings yet
- Chapter 4 Multiple-Degree-of-Freedom (MDOF) Systems ExamplesDocument17 pagesChapter 4 Multiple-Degree-of-Freedom (MDOF) Systems ExamplesprashanthNo ratings yet
- Full Download Solutions Manual For Engineering Vibration 4th by Inman 0132871696 PDF Full ChapterDocument36 pagesFull Download Solutions Manual For Engineering Vibration 4th by Inman 0132871696 PDF Full Chapterpolelessfeck8avz100% (16)
- Full Solutions Manual For Engineering Vibration 4Th by Inman 0132871696 PDF Docx Full Chapter ChapterDocument36 pagesFull Solutions Manual For Engineering Vibration 4Th by Inman 0132871696 PDF Docx Full Chapter Chaptercrawlhoggery7htt100% (17)
- Ap Exam Supplement: Specifically Developed For This Year's AP ExamDocument8 pagesAp Exam Supplement: Specifically Developed For This Year's AP ExamGan PentonNo ratings yet
- APSC 111 MT 2 WorkbookDocument17 pagesAPSC 111 MT 2 WorkbookMaya Kerzner100% (1)
- Lagrange Mechanics I: Presented By: Amir Patel PHD (Mechatronics) Cape TownDocument29 pagesLagrange Mechanics I: Presented By: Amir Patel PHD (Mechatronics) Cape TownDaniel JonesNo ratings yet
- Civil Engineering Mechanics CVG2149: LEC 15 Plane Motion of Rigid Bodies: Energy and Momentum Methods (CH. 17)Document6 pagesCivil Engineering Mechanics CVG2149: LEC 15 Plane Motion of Rigid Bodies: Energy and Momentum Methods (CH. 17)Kaiss Nael OsmanNo ratings yet
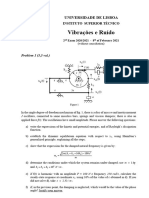
- Exam Vibrations and NoiseDocument5 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- FSE10024 Introductory Physical Science: Formula SheetDocument3 pagesFSE10024 Introductory Physical Science: Formula Sheetwkquay22No ratings yet
- Chapter 3 (Updated)Document18 pagesChapter 3 (Updated)villianNo ratings yet
- Hard or Physical SystemsDocument33 pagesHard or Physical Systemsadityakashyap123No ratings yet
- Friction Lagrange PDFDocument8 pagesFriction Lagrange PDFMohamed MagdyNo ratings yet
- Some Useful Formulae: A A A A A A + + + +Document3 pagesSome Useful Formulae: A A A A A A + + + +leichihouNo ratings yet
- Equation Reference SheetDocument2 pagesEquation Reference SheetwilliamsmarrenNo ratings yet
- Experiment 09: Angular MomentumDocument29 pagesExperiment 09: Angular MomentumHasan AydonNo ratings yet
- PHYS 101 - General Physics-I, Final ExamDocument8 pagesPHYS 101 - General Physics-I, Final ExamhuuuzenNo ratings yet
- 2023 BPH OanswerbookletsDocument18 pages2023 BPH Oanswerbookletsliumeilin20070625No ratings yet
- Chemistry Formula SheetDocument18 pagesChemistry Formula Sheetannuj vermaNo ratings yet
- Topic 2 Flexibilty MethodDocument134 pagesTopic 2 Flexibilty Methodazerai2000No ratings yet
- Lecture 3 - Kinetics of Particles Energy and Momentum MethodsDocument32 pagesLecture 3 - Kinetics of Particles Energy and Momentum MethodsKeu JiannRong0% (2)
- Physics - Basic General Relativity (Benjamin McKay, U of Utah, 2001) PDFDocument24 pagesPhysics - Basic General Relativity (Benjamin McKay, U of Utah, 2001) PDFAmitanshu PandaNo ratings yet
- MATH1023 Notes (2020)Document21 pagesMATH1023 Notes (2020)Kyle BroderNo ratings yet
- Fem 02Document41 pagesFem 02Việt Nguyễn DuyNo ratings yet
- Moment of Inertia ExperimentDocument11 pagesMoment of Inertia ExperimentDương Quang MinhNo ratings yet
- Cambridge International AS & A Level: PHYSICS 9702/41Document24 pagesCambridge International AS & A Level: PHYSICS 9702/41with love, alisha.No ratings yet
- FabienneDocument26 pagesFabienneapi-316318749No ratings yet
- Kinetics of Particles - 2 - ClassDocument51 pagesKinetics of Particles - 2 - ClassLebogang TlhagwaneNo ratings yet
- Lecture 22Document13 pagesLecture 22I190845 Samana NayyabNo ratings yet
- FE Sheet Topics 5 To 8Document8 pagesFE Sheet Topics 5 To 8Sir RickSolNo ratings yet
- Vector Mechanics For Engineers Dynamics 11th Edition 3chDocument28 pagesVector Mechanics For Engineers Dynamics 11th Edition 3ch양한마리No ratings yet
- CH 34Document9 pagesCH 34ausgrumb xoneNo ratings yet
- Tutorial SolutionsDocument67 pagesTutorial SolutionsthewingsmissionNo ratings yet
- Cambridge International AS & A Level: PHYSICS 9702/41Document24 pagesCambridge International AS & A Level: PHYSICS 9702/41Gcmarshall82No ratings yet
- AP1 Rotational Motion Presenter W Answers PDFDocument34 pagesAP1 Rotational Motion Presenter W Answers PDFMisakiNo ratings yet
- Exam Vibrations and NoiseDocument6 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- Lecture 1 - 2022 - Introduction To Mechanical VibrationsDocument36 pagesLecture 1 - 2022 - Introduction To Mechanical VibrationsHuzaifa KhalidiNo ratings yet
- CLUTCHDocument6 pagesCLUTCHAboud MNo ratings yet
- V&N 354 LectureLesing4Document6 pagesV&N 354 LectureLesing4YemukelaniNo ratings yet
- Xgu26IwsReiLtuiMLIXobw Web3p16 Method of Moments 200624 Coursera PDFDocument21 pagesXgu26IwsReiLtuiMLIXobw Web3p16 Method of Moments 200624 Coursera PDFRigved SharmaNo ratings yet
- Kinetic Energy of Rigid Bodies PDFDocument7 pagesKinetic Energy of Rigid Bodies PDFGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Cambridge International AS & A Level: PHYSICS 9702/42Document24 pagesCambridge International AS & A Level: PHYSICS 9702/42chandi poornimaNo ratings yet
- How Does Redex Differential Drive WorkDocument26 pagesHow Does Redex Differential Drive WorkhawyegNo ratings yet
- Flywheels 1Document15 pagesFlywheels 1Erika DanganNo ratings yet
- Computation and Astrophysics of The N-Body ProblemDocument57 pagesComputation and Astrophysics of The N-Body Problemstalker2222No ratings yet
- Fem Formulae PDFDocument12 pagesFem Formulae PDFvamsi krishnaNo ratings yet
- Qualifying Fall 202 0Document9 pagesQualifying Fall 202 0Saswata MandalNo ratings yet
- Data and Formula BookletDocument5 pagesData and Formula Booklet王涛No ratings yet
- New Recipe Lagrangian FormalismDocument17 pagesNew Recipe Lagrangian FormalismVaijantiNo ratings yet
- Physics218!1!7 ReviewDocument9 pagesPhysics218!1!7 ReviewDickston AlojadoNo ratings yet
- Physics218 - 1 7 Review PDFDocument9 pagesPhysics218 - 1 7 Review PDFDickston AlojadoNo ratings yet
- Manipulator Dynamics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentDocument44 pagesManipulator Dynamics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentWajdi SadiqNo ratings yet
- Physical Chemistry Exam 1 KeyDocument8 pagesPhysical Chemistry Exam 1 KeyOsama GhaniNo ratings yet
- CH 10Document29 pagesCH 10Ardian20No ratings yet
- Classical Mechanics - 20%Document9 pagesClassical Mechanics - 20%bekozagreNo ratings yet
- Physical ChemistryDocument7 pagesPhysical ChemistrySIDRA NAZEER SAIF100% (1)
- Mining Example LagrangianDocument7 pagesMining Example LagrangianMax ShervingtonNo ratings yet
- Ems ch9 NTDocument19 pagesEms ch9 NTPurna YalamanchiliNo ratings yet
- Dynamisch Zuschlag PDFDocument180 pagesDynamisch Zuschlag PDFrake1984No ratings yet
- Vdocuments - MX - Ams Suite Machinery Health Manager 52 and 53 New Mediaresources NewDocument16 pagesVdocuments - MX - Ams Suite Machinery Health Manager 52 and 53 New Mediaresources NewManel MontesinosNo ratings yet
- Dolmatov 2016 IOP Conf. Ser. Earth Environ. Sci. 49 072009Document10 pagesDolmatov 2016 IOP Conf. Ser. Earth Environ. Sci. 49 072009Manel MontesinosNo ratings yet
- Experimental Vibration Level Analysis of A Francis TurbineDocument10 pagesExperimental Vibration Level Analysis of A Francis TurbineManel MontesinosNo ratings yet
- Iso 20816 5 2018Document15 pagesIso 20816 5 2018Manel MontesinosNo ratings yet
- Kurtosis Analisys PDFDocument8 pagesKurtosis Analisys PDFeng13No ratings yet
- Chapter 7Document2 pagesChapter 7Manel MontesinosNo ratings yet
- The Wacky World of Acoustics - Decibel "Funny" Math and Human Hearing - SiemeDocument15 pagesThe Wacky World of Acoustics - Decibel "Funny" Math and Human Hearing - SiemeManel MontesinosNo ratings yet
- PLC Training KitDocument1 pagePLC Training KitManel MontesinosNo ratings yet
- What Is The Acoustic Quantity Called Q - SiemensplmDocument12 pagesWhat Is The Acoustic Quantity Called Q - SiemensplmManel MontesinosNo ratings yet
- Vibration - Measure Acceleration, Velocity or Displacement - Prosig Noise &Document12 pagesVibration - Measure Acceleration, Velocity or Displacement - Prosig Noise &Manel MontesinosNo ratings yet
- What's Wrong With My Accelerometer - Calibration - The Modal Shop, Inc.Document4 pagesWhat's Wrong With My Accelerometer - Calibration - The Modal Shop, Inc.Manel MontesinosNo ratings yet
- Community Health Nursing BookDocument96 pagesCommunity Health Nursing BookSamantha Renei SanchezNo ratings yet
- Earth & Life Science: Quarter 2-Week 1Document7 pagesEarth & Life Science: Quarter 2-Week 1katy PNo ratings yet
- Statistics For Business and EconomicsDocument19 pagesStatistics For Business and EconomicsSai MeenaNo ratings yet
- Crime Scene Power PointDocument31 pagesCrime Scene Power PointAya ChouaibNo ratings yet
- Physical Science NOV. 20-22, 2019 DLPDocument2 pagesPhysical Science NOV. 20-22, 2019 DLPJedidiah Jara QuidetNo ratings yet
- Combinatorics Worksheet 3 - Recurrence RelationsDocument2 pagesCombinatorics Worksheet 3 - Recurrence RelationsJane ChangNo ratings yet
- Build Your Own GaussmeterDocument4 pagesBuild Your Own GaussmeterSushant ChhotrayNo ratings yet
- Magic Arrays - Multichannel Microphone Array Design Applied To Microphone Arrays Generating Interformat CompatabilityDocument19 pagesMagic Arrays - Multichannel Microphone Array Design Applied To Microphone Arrays Generating Interformat CompatabilitymewarulesNo ratings yet
- Critical Study of Richard Dawkins, The God DelusionDocument10 pagesCritical Study of Richard Dawkins, The God DelusionJuan Pablo Pardo BarreraNo ratings yet
- Pathways 4 Listening & Speaking Unit 4 TestDocument8 pagesPathways 4 Listening & Speaking Unit 4 TestaLeKs GaRcíA100% (1)
- Effect of Oxygen On Surface Tension of Liquid Ag-Sn AlloysDocument5 pagesEffect of Oxygen On Surface Tension of Liquid Ag-Sn AlloysBurak ÖZBAKIRNo ratings yet
- Positive Mental AttitudeDocument83 pagesPositive Mental AttitudemuetanianNo ratings yet
- CHM556 - Experiment 1 - Isolation of Caffeine From A Tea BagDocument8 pagesCHM556 - Experiment 1 - Isolation of Caffeine From A Tea Bagnabilahdaud93% (45)
- Astm D5208 14 2022Document3 pagesAstm D5208 14 2022Maria Aparecida Pereira DamascenoNo ratings yet
- Chemical EtchDocument18 pagesChemical EtchznpfgNo ratings yet
- Grammar: Frequency AdverbsDocument2 pagesGrammar: Frequency AdverbsRedamanNo ratings yet
- 7055 - Case Study - UK Power Station FINAL For WEBDocument2 pages7055 - Case Study - UK Power Station FINAL For WEBNyx RubyNo ratings yet
- Mobatec Modeller Intorduction Course Tutorial IDocument10 pagesMobatec Modeller Intorduction Course Tutorial IMohammad Yasser RamzanNo ratings yet
- Aug 7 IELTS Test 20Document10 pagesAug 7 IELTS Test 20Sunshine HannNo ratings yet
- My Side of The Mountain PDFDocument61 pagesMy Side of The Mountain PDF12333% (3)
- FEM R&S Information Bulletin 10 - Warehouse Building - Racking - FINALDocument21 pagesFEM R&S Information Bulletin 10 - Warehouse Building - Racking - FINALMa PonyNo ratings yet
- Final Verbal Agression ResearchDocument26 pagesFinal Verbal Agression ResearchLucañas PhilipNo ratings yet
- Institute of Southern Punjab Multan: Syed Zohair Quain Haider Lecturer ISP MultanDocument47 pagesInstitute of Southern Punjab Multan: Syed Zohair Quain Haider Lecturer ISP MultanCh MaaanNo ratings yet
- ICT Basic Types of ComputerDocument7 pagesICT Basic Types of ComputerMomina B KhanNo ratings yet
- Green Chemistry ModuleDocument17 pagesGreen Chemistry ModuleAniruddhNo ratings yet
- 111196688bed Odl TimetabaleDocument1 page111196688bed Odl TimetabaleVIVEK MURDHANINo ratings yet
- RFQ 10406475 - RWSCM00015F-Rev05-RequestforQuotationSupplyandDelivery - 20230929112300.955 - X 23 October 2023TDocument11 pagesRFQ 10406475 - RWSCM00015F-Rev05-RequestforQuotationSupplyandDelivery - 20230929112300.955 - X 23 October 2023TPfunzo MammbaNo ratings yet
- Maharishi Sadasiva Isham-AscensionDocument125 pagesMaharishi Sadasiva Isham-AscensionCristian Catalina100% (2)
- Expert-Verified: COMPETITIVE in NatureDocument1 pageExpert-Verified: COMPETITIVE in NatureBeibei LingNo ratings yet
- Vignettes: I. Lesson PlanDocument27 pagesVignettes: I. Lesson PlanAcademic ServicesNo ratings yet
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectFrom EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectRating: 4.5 out of 5 stars4.5/5 (20)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Giza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyFrom EverandGiza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyNo ratings yet
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismFrom EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismRating: 4 out of 5 stars4/5 (500)
- The Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceFrom EverandThe Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceRating: 4.5 out of 5 stars4.5/5 (23)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- Chernobyl 01:23:40: The Incredible True Story of the World's Worst Nuclear DisasterFrom EverandChernobyl 01:23:40: The Incredible True Story of the World's Worst Nuclear DisasterRating: 4 out of 5 stars4/5 (264)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (49)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (409)
- Strange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsFrom EverandStrange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsRating: 4 out of 5 stars4/5 (94)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- Too Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldFrom EverandToo Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldRating: 4.5 out of 5 stars4.5/5 (8)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- The Sounds of Life: How Digital Technology Is Bringing Us Closer to the Worlds of Animals and PlantsFrom EverandThe Sounds of Life: How Digital Technology Is Bringing Us Closer to the Worlds of Animals and PlantsRating: 5 out of 5 stars5/5 (5)
- The Holographic Universe: The Revolutionary Theory of RealityFrom EverandThe Holographic Universe: The Revolutionary Theory of RealityRating: 4.5 out of 5 stars4.5/5 (76)
- The Beginning of Infinity: Explanations That Transform the WorldFrom EverandThe Beginning of Infinity: Explanations That Transform the WorldRating: 5 out of 5 stars5/5 (60)