You might also like
- Squat Manoeuvering - The Nautical InstituteDocument14 pagesSquat Manoeuvering - The Nautical InstituteClaudio MF100% (2)
- Ship Dynamics - Lecture 2Document16 pagesShip Dynamics - Lecture 2shayan.rabizadeNo ratings yet
- Ship StressesDocument7 pagesShip StressesSumit Sinha50% (2)
- Ship SquatDocument5 pagesShip SquatVisveswaran InbasekaranNo ratings yet
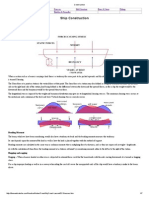
- Ship ConstructionDocument7 pagesShip Constructionpramodkb_cusatNo ratings yet
- Characteristics of Ship Generated Waves and Wash Waves High-Speed ShipsDocument9 pagesCharacteristics of Ship Generated Waves and Wash Waves High-Speed ShipsK SephirothNo ratings yet
- Aizimuth Tug BoatDocument3 pagesAizimuth Tug BoatTuan Dao QuangNo ratings yet
- Ship Manoeuvring 2Document10 pagesShip Manoeuvring 2nyshauna strachanNo ratings yet
- Narrow Ship Wakes and Wave Drag For Planing HullsDocument5 pagesNarrow Ship Wakes and Wave Drag For Planing HullsMarsel GabrielNo ratings yet
- Loss Prevention Bulletin Naiko Class Vol.4 - Ship Maneuvering Technical ReferenceDocument78 pagesLoss Prevention Bulletin Naiko Class Vol.4 - Ship Maneuvering Technical ReferenceHerlambang Miracle Yudhian100% (1)
- Hydrodynamic Features of High-Speed VesselsDocument11 pagesHydrodynamic Features of High-Speed VesselsChen Chu-yunNo ratings yet
- Ship Hull ManualDocument31 pagesShip Hull ManualRajeev Balakrishnan100% (1)
- Damage Stability 1 PDFDocument19 pagesDamage Stability 1 PDFhana bahestiNo ratings yet
- A Unified Seakeeping and Maneuvering Analysis of Two Interacting ShipsDocument11 pagesA Unified Seakeeping and Maneuvering Analysis of Two Interacting ShipsRajiv ShirodkarNo ratings yet
- Waterjet Propulsion of Small-Draught Inland Waterways ShipsDocument6 pagesWaterjet Propulsion of Small-Draught Inland Waterways ShipsshahjadaNo ratings yet
- Quay Walls Mooring Capacity Increasing: V. Paulauskas, J. WijffelsDocument6 pagesQuay Walls Mooring Capacity Increasing: V. Paulauskas, J. Wijffelsidfi ashariNo ratings yet
- Jurnal 43Document9 pagesJurnal 43fikri aryantoNo ratings yet
- KT 07 PDFDocument7 pagesKT 07 PDFmusebladeNo ratings yet
- Bernoulli Effect Accidents ShipsDocument14 pagesBernoulli Effect Accidents ShipsshahjadaNo ratings yet
- Dynamical Models of Extreme Rolling of Vessels in Head WavesDocument27 pagesDynamical Models of Extreme Rolling of Vessels in Head WavesOscar Sacases PlanasNo ratings yet
- A Review of The Prediction of Squat in Shallow WaterDocument12 pagesA Review of The Prediction of Squat in Shallow WaterEdsonNo ratings yet
- Journée - Predictoin of The Behaviour of A Ship in SeawayDocument24 pagesJournée - Predictoin of The Behaviour of A Ship in SeawayeNo ratings yet
- A Unified Seakeeping and Maneuvering Analysis of Two Interacting ShipsDocument10 pagesA Unified Seakeeping and Maneuvering Analysis of Two Interacting Shipsramia_30No ratings yet
- Paper-1 - IJSER - Format-07 Mar 18Document3 pagesPaper-1 - IJSER - Format-07 Mar 18sabihaNo ratings yet
- Numerical Analysis of Patrol Boat Performance With A Stern FlapDocument8 pagesNumerical Analysis of Patrol Boat Performance With A Stern FlapsirousNo ratings yet
- Study of A Boat Hull ShapeDocument5 pagesStudy of A Boat Hull ShapeNobleMathewsNo ratings yet
- Cargo 1Document105 pagesCargo 1umut tunalıNo ratings yet
- Ship Route Design For Avoiding Heavy Weather and Sea ConditionsDocument6 pagesShip Route Design For Avoiding Heavy Weather and Sea ConditionsPrasad PatilNo ratings yet
- Ship S Pivot PointDocument41 pagesShip S Pivot Pointbehzad parsi100% (1)
- Ship S Pivot PointDocument41 pagesShip S Pivot Pointbehzad parsiNo ratings yet
- Ship S Pivot PointDocument41 pagesShip S Pivot Pointbehzad parsi100% (1)
- Eular Beam FailureDocument24 pagesEular Beam FailureSaptarshi BasuNo ratings yet
- Taprop TahananDocument27 pagesTaprop TahananSiskal DdNo ratings yet
- Pivot Point WebDocument21 pagesPivot Point WebRobert RobertoNo ratings yet
- Radojcic - On High Speed Mono.2010.SYMPDocument19 pagesRadojcic - On High Speed Mono.2010.SYMPnavalarchmarine100% (1)
- Ship's Pivot PointDocument41 pagesShip's Pivot Point.cheng.100% (7)
- Pivot PointDocument22 pagesPivot Pointjanderclanderpeich100% (1)
- What Is SquatDocument2 pagesWhat Is SquatSat Partner100% (1)
- Longitudinal Ship's Hull Strength Monitoring With Optical Fiber SensorsDocument4 pagesLongitudinal Ship's Hull Strength Monitoring With Optical Fiber SensorsMahdiNo ratings yet
- !487964726 F 6 D 656368616 e 696373Document192 pages!487964726 F 6 D 656368616 e 696373gd3578No ratings yet
- Unit 1 Part-A: Coventional HullDocument5 pagesUnit 1 Part-A: Coventional HullPrabakaran MgkNo ratings yet
- V Kinematic Viscosity: F F F 2 F N 2 NDocument4 pagesV Kinematic Viscosity: F F F 2 F N 2 NDuchess Juliane Jose Mirambel0% (1)
- Matlab TutorialDocument55 pagesMatlab TutorialSahil JawaNo ratings yet
- Passing Ship SeeligDocument52 pagesPassing Ship SeeligPeyman Mzn100% (1)
- The Power Necessary To Overcome This Resistance Is Called The) Where: V 0.5144 M/secDocument11 pagesThe Power Necessary To Overcome This Resistance Is Called The) Where: V 0.5144 M/secBharatiyulam100% (1)
- Assess Reported Defects and Damage of BC - Consider Bending Movements and Shear ForcesDocument4 pagesAssess Reported Defects and Damage of BC - Consider Bending Movements and Shear Forcesaashifa aliteNo ratings yet
- Passenger Ship in A Shipyard at Papenburg, Ger. © Meyer-Werft/Press and Information Office of TheDocument69 pagesPassenger Ship in A Shipyard at Papenburg, Ger. © Meyer-Werft/Press and Information Office of TheVinoth KumarNo ratings yet
- 15 Circ-796Document24 pages15 Circ-796Canberk KarahanNo ratings yet
- Journee SteeringDocument21 pagesJournee SteeringsorenvinNo ratings yet
- Inter-Global College Foundation, Inc.: Course Module Student'SDocument6 pagesInter-Global College Foundation, Inc.: Course Module Student'Schristian valdoriaNo ratings yet
- Ship Manoeuvring-Closing The Safety LoopDocument13 pagesShip Manoeuvring-Closing The Safety LoopMichael ManuelNo ratings yet
- 11MMMMMDocument5 pages11MMMMMHARI SURYANANo ratings yet
- MSC.1-Circ.707 - Guidance To The Master For Avoiding DangerousSituations in Following and Quartering Seas (Secretariat) PDFDocument14 pagesMSC.1-Circ.707 - Guidance To The Master For Avoiding DangerousSituations in Following and Quartering Seas (Secretariat) PDFhugh7777No ratings yet
- 2) Basic Seamanship - Hull Structure PDFDocument45 pages2) Basic Seamanship - Hull Structure PDFRodrigo II Eucogco100% (2)
- HR0L 35 LO 3 S2 (Shear Forces and Bending Moments) - 464458981Document21 pagesHR0L 35 LO 3 S2 (Shear Forces and Bending Moments) - 464458981noczviviNo ratings yet
- Project (Sajjat Mistry For Grse)Document11 pagesProject (Sajjat Mistry For Grse)Souvik SamantaNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Problem of Stopping Vessel at The Waypoint For Full-Mission Control AutopilotDocument6 pagesProblem of Stopping Vessel at The Waypoint For Full-Mission Control AutopilotKLF CanadaNo ratings yet
- Paris MoU On Port State Control 586d33490d194Document23 pagesParis MoU On Port State Control 586d33490d194KLF CanadaNo ratings yet
- 201311260306429013428dgsorder2 2002Document3 pages201311260306429013428dgsorder2 2002KLF CanadaNo ratings yet
- 201311260327188857178dgsorder6 2003Document1 page201311260327188857178dgsorder6 2003KLF CanadaNo ratings yet
- Lesson 3.2. Chemical Reactors Design PDFDocument28 pagesLesson 3.2. Chemical Reactors Design PDFJulia Vago EncinaNo ratings yet
- Final Fantasy IvaliceDocument156 pagesFinal Fantasy IvaliceLuca De LongisNo ratings yet
- Types of Academic Text: 1. Understanding The Importance of GenreDocument9 pagesTypes of Academic Text: 1. Understanding The Importance of GenreThelma LanadoNo ratings yet
- RC MENQOL-I AU1.0 1week-Recall eng-CAoriDocument6 pagesRC MENQOL-I AU1.0 1week-Recall eng-CAoriRoviqi Bozgank AzemNo ratings yet
- Markov Clustering AlgorithmDocument53 pagesMarkov Clustering AlgorithmAaryan GuptaNo ratings yet
- 178 Capstone: - DigitalDocument1 page178 Capstone: - DigitalAbdul Nafi SarwariNo ratings yet
- Kajian DTA Waduk GondangDocument10 pagesKajian DTA Waduk GondangalfianNo ratings yet
- Contingency PlanDocument4 pagesContingency PlanDwinix John Cabañero100% (3)
- Failure Mechanism-Based Reliability Assessment Framework: A Case Study in An Automotive ComponentDocument9 pagesFailure Mechanism-Based Reliability Assessment Framework: A Case Study in An Automotive ComponentmaruvadatarunNo ratings yet
- Nygård 2019Document9 pagesNygård 2019Wágner B SilvaNo ratings yet
- Analyzing Selected Filipino Films Using The Lens of Psychoanalytic Theory: Oda Sa Wala, The Four Sisters and A Wedding, and BlissDocument4 pagesAnalyzing Selected Filipino Films Using The Lens of Psychoanalytic Theory: Oda Sa Wala, The Four Sisters and A Wedding, and BlissShirwynne Millare100% (1)
- GoferbrokeDocument11 pagesGoferbrokeARUN VIJAYNo ratings yet
- Liquefaction Potential Based On Swedish Weight Sounding Test in Langaleso Village Sigy RegencyDocument8 pagesLiquefaction Potential Based On Swedish Weight Sounding Test in Langaleso Village Sigy RegencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Introduction Computational Ingineering MatlabDocument439 pagesIntroduction Computational Ingineering MatlabJose CapablancaNo ratings yet
- Thesis FieldworkDocument5 pagesThesis FieldworkPaySomeoneToWriteAPaperUK100% (1)
- Mobile Phones and RadiationDocument6 pagesMobile Phones and RadiationGehanShabanNo ratings yet
- The Correlation of Social Anxiety Towards The Behaviour of Grade 12 Students in SJDM Cornerstone College Inc.Document47 pagesThe Correlation of Social Anxiety Towards The Behaviour of Grade 12 Students in SJDM Cornerstone College Inc.Mark The PainterNo ratings yet
- Avoidant Personality DisorderDocument11 pagesAvoidant Personality DisorderRozitaNo ratings yet
- Topic Wise Bundle PDF Course Quantitative Aptitude-Approximation Set-1 (Eng)Document11 pagesTopic Wise Bundle PDF Course Quantitative Aptitude-Approximation Set-1 (Eng)Nikhil SharmaNo ratings yet
- CM2 CFS100 2002 04Document32 pagesCM2 CFS100 2002 04Akmal ZuhriNo ratings yet
- Mock Exam - MathDocument4 pagesMock Exam - MathFati FleurNo ratings yet
- Bes 303 Mathematics For Economist Ii 2021Document4 pagesBes 303 Mathematics For Economist Ii 2021KAMENYA SAMWEL D191/16827/2019No ratings yet
- Research 1st LectureDocument23 pagesResearch 1st LectureJanee JaneNo ratings yet
- 1490882846Document28 pages1490882846Tucciy Alentine MaeNo ratings yet
- LogDocument18 pagesLogPrawiro indro BhaktiNo ratings yet
- Prof. M. S. Baghel - Ayurveda India-Global ScenarioDocument27 pagesProf. M. S. Baghel - Ayurveda India-Global Scenarioremya jNo ratings yet
- Border-Study/: "Borderless" and Cross-Border EducationDocument10 pagesBorder-Study/: "Borderless" and Cross-Border EducationSan TyNo ratings yet
- Curriculum Vitae Name: Sex: Marital Status: Date of Birth: Address: Telephone: Email Address: ObjectiveDocument2 pagesCurriculum Vitae Name: Sex: Marital Status: Date of Birth: Address: Telephone: Email Address: ObjectiveCandice LynchNo ratings yet
- Simon E3 CatalogueDocument16 pagesSimon E3 CataloguemarketingsneNo ratings yet
- CDC - Land Capability Assessment - Part 3 Housing Code: AddressDocument5 pagesCDC - Land Capability Assessment - Part 3 Housing Code: AddressDanny NguyenNo ratings yet