You might also like
- Passenger Ship in A Shipyard at Papenburg, Ger. © Meyer-Werft/Press and Information Office of TheDocument69 pagesPassenger Ship in A Shipyard at Papenburg, Ger. © Meyer-Werft/Press and Information Office of TheVinoth KumarNo ratings yet
- ShipDocument88 pagesShipGiorgi KandelakiNo ratings yet
- Naval Architecture: Ship, Any Large Floating Vessel Capable of Crossing Open Waters, As Opposed ToDocument5 pagesNaval Architecture: Ship, Any Large Floating Vessel Capable of Crossing Open Waters, As Opposed ToChristianNo ratings yet
- Shipping Types EncyclopediaDocument57 pagesShipping Types EncyclopediaVinoth KumarNo ratings yet
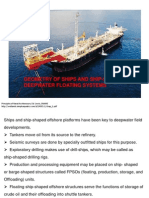
- Geometry of Ships and Ship-Shaped Deepwater Floating SystemsDocument55 pagesGeometry of Ships and Ship-Shaped Deepwater Floating SystemsKrishnan ChockalingamNo ratings yet
- Matlab TutorialDocument55 pagesMatlab TutorialSahil JawaNo ratings yet
- What Is Baseline of A ShipDocument11 pagesWhat Is Baseline of A ShipSwarg Vibha100% (1)
- Seam 3bDocument8 pagesSeam 3bjun franklin fundalNo ratings yet
- Naval Architecture 1 Class Notes: Omar Bin YaakobDocument126 pagesNaval Architecture 1 Class Notes: Omar Bin Yaakobronny-su100% (1)
- Metacentric HeightDocument6 pagesMetacentric HeightKeyboardMan1960No ratings yet
- Weight and BuoyancyDocument28 pagesWeight and BuoyancyElmer SullonNo ratings yet
- WS NotesDocument7 pagesWS NotesYanyan2009No ratings yet
- Damage Stability of A Vessel?Document33 pagesDamage Stability of A Vessel?bosereeNo ratings yet
- Eular Beam FailureDocument24 pagesEular Beam FailureSaptarshi BasuNo ratings yet
- Ship Hull Manual OverviewDocument31 pagesShip Hull Manual OverviewRajeev Balakrishnan100% (1)
- Cargo 1Document105 pagesCargo 1umut tunalıNo ratings yet
- Why Ships Fail in MidshipDocument6 pagesWhy Ships Fail in MidshipRohit KakadeNo ratings yet
- Ship Stability and SubdivionDocument16 pagesShip Stability and SubdivionAnmol AgarwalNo ratings yet
- Construction: 4.1. Definitions of Hull ElementsDocument12 pagesConstruction: 4.1. Definitions of Hull ElementsNasreddine CherifNo ratings yet
- L.O.A, L.B.P, Moulded Depth and other ship dimensionsDocument23 pagesL.O.A, L.B.P, Moulded Depth and other ship dimensionsNyo Thant100% (4)
- Presentation Construction ShipsDocument43 pagesPresentation Construction Shipsmarinela979100% (3)
- WWW Britannica Com Technology ShipDocument6 pagesWWW Britannica Com Technology ShipSeven JusovicNo ratings yet
- Sos - Key (2015-16 Ay)Document18 pagesSos - Key (2015-16 Ay)DODDI PRASADNo ratings yet
- Multiple Vessel Dry Docking PDFDocument5 pagesMultiple Vessel Dry Docking PDFGermán AguirrezabalaNo ratings yet
- Ship Parts Definition & Immersion HydrometerDocument5 pagesShip Parts Definition & Immersion HydrometerHOSSAIN AL FAYSALNo ratings yet
- 2) Basic Seamanship - Hull Structure PDFDocument45 pages2) Basic Seamanship - Hull Structure PDFRodrigo II Eucogco100% (2)
- Strength of ShipsDocument6 pagesStrength of ShipskrutarthpatraNo ratings yet
- Welcome To International Journal of Engineering Research and Development (IJERD)Document9 pagesWelcome To International Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- BST - Module VDocument12 pagesBST - Module VT VigneshwarNo ratings yet
- Updated Ship - Cons - and - Na PDFDocument60 pagesUpdated Ship - Cons - and - Na PDFvenkatachalapathy.thNo ratings yet
- Fender Design Criteria GuideDocument9 pagesFender Design Criteria GuideOladunni AfolabiNo ratings yet
- SF and BM LimitsDocument4 pagesSF and BM LimitsBiplab SharmaNo ratings yet
- Ship Stability: Damaged Stability of ShipsDocument11 pagesShip Stability: Damaged Stability of ShipsgeorgesagunaNo ratings yet
- Primary StructureDocument8 pagesPrimary StructureKentNo ratings yet
- Ship Terms ExplainedDocument7 pagesShip Terms ExplainedVidyadharan KumaranNo ratings yet
- GSK 50% Stability QuestionsDocument6 pagesGSK 50% Stability Questionsliao_marco100% (1)
- How bilge keels, anti-rolling tanks and stabilizer fins reduce ship rolling amplitudeDocument37 pagesHow bilge keels, anti-rolling tanks and stabilizer fins reduce ship rolling amplitudeMark Antolino75% (8)
- SP2Document15 pagesSP2Deepak PooranachandranNo ratings yet
- Seam6 Final ReviewerDocument3 pagesSeam6 Final ReviewerJerrym AbañoNo ratings yet
- Lecture NotesDocument32 pagesLecture NotesSree Harsha Penugonda100% (1)
- Grabe Chesapeake 03Document11 pagesGrabe Chesapeake 03BetaLavalNo ratings yet
- SMSC-1400-01 - Answer KeysDocument5 pagesSMSC-1400-01 - Answer KeysAmir SoleimanyNo ratings yet
- Task PerformanceDocument8 pagesTask Performance11 STEM 4 - CORTAZ,TRISHA MAE ANTHONYNo ratings yet
- Class 4 Safety Oral Ship Construction & Naval FileDocument72 pagesClass 4 Safety Oral Ship Construction & Naval Fileclinton100% (4)
- Ship stability basicsDocument5 pagesShip stability basicsRachmat Hidayat SapwariNo ratings yet
- Loads On Ship HullsDocument6 pagesLoads On Ship HullsVania HalachevaNo ratings yet
- Marine Rubber FendersDocument8 pagesMarine Rubber FendersSuryo Wijiono PambudiNo ratings yet
- Ship Geometry - IDocument39 pagesShip Geometry - Isunnyasrahul raj100% (1)
- Squat Manoeuvering - The Nautical InstituteDocument14 pagesSquat Manoeuvering - The Nautical InstituteClaudio MF100% (2)
- Intro To NADocument11 pagesIntro To NAAnshuman SharmaNo ratings yet
- 9 10 TH Week Seam 2Document13 pages9 10 TH Week Seam 2Carlo ValdezNo ratings yet
- Day 4Document7 pagesDay 4MALIK TALHA ALI SAJIDNo ratings yet
- SquatDocument2 pagesSquatwaleed yehiaNo ratings yet
- SHIP CONSTRUCTION - Q&AsDocument23 pagesSHIP CONSTRUCTION - Q&Assea.sanjay3333No ratings yet
- Understanding Ship Stability During Dry DockDocument5 pagesUnderstanding Ship Stability During Dry DockGiorgi KandelakiNo ratings yet
- Watertight Bulkheads Protect Passenger ShipsDocument6 pagesWatertight Bulkheads Protect Passenger Shipsoussama achouriNo ratings yet
- Ship ConstructionDocument7 pagesShip Constructionpramodkb_cusatNo ratings yet
- Ship StabilityDocument8 pagesShip StabilityMahmoud SalamaNo ratings yet
- List of Trigonometric IdentitiesDocument16 pagesList of Trigonometric IdentitiesArnab NandiNo ratings yet
- Capacity Based On Shear Parameters As Per IS 6403: C C C C W Q Q Q Q F y y y yDocument5 pagesCapacity Based On Shear Parameters As Per IS 6403: C C C C W Q Q Q Q F y y y yKishore KumarNo ratings yet
- Literature Review On Waste Management in NigeriaDocument9 pagesLiterature Review On Waste Management in NigeriajzneaqwgfNo ratings yet
- RD218 Gardan 3110 Ob2226657 NDocument1 pageRD218 Gardan 3110 Ob2226657 Nopen hartigNo ratings yet
- VariablesDocument11 pagesVariablesKzy ayanNo ratings yet
- Delays in Endoscope Reprocessing and The Biofilms WithinDocument12 pagesDelays in Endoscope Reprocessing and The Biofilms WithinHAITHM MURSHEDNo ratings yet
- Arts and Crafts of Basey SamarDocument28 pagesArts and Crafts of Basey SamarTrisha MenesesNo ratings yet
- Course Outline TP WindowsDocument6 pagesCourse Outline TP WindowsAnonymous PcPkRpAKD5No ratings yet
- 2016 Aiersi ukulele pricelist models and pricesDocument16 pages2016 Aiersi ukulele pricelist models and pricesOctavio ColungaNo ratings yet
- GogikavofobifigukidonDocument2 pagesGogikavofobifigukidonMd. Bepul HossainNo ratings yet
- Company Electronics Appliances Semiconductors South Korea's: SamsungDocument61 pagesCompany Electronics Appliances Semiconductors South Korea's: Samsunghaseeb ahmedNo ratings yet
- DGN ExamDocument5 pagesDGN ExamMaiga Ayub HusseinNo ratings yet
- HTML MCQDocument22 pagesHTML MCQBuxar Students LifeNo ratings yet
- V200 User ManualDocument171 pagesV200 User ManualuriahskyNo ratings yet
- 2020会社案内(英語版)Document18 pages2020会社案内(英語版)DAC ORGANIZERNo ratings yet
- Fault ModelingDocument21 pagesFault ModelingRamarao ChNo ratings yet
- Form 7Document2 pagesForm 7Wing TabarNo ratings yet
- Certified Islamic Professional Accountant (Cipa) ProgramDocument13 pagesCertified Islamic Professional Accountant (Cipa) ProgramTijjani Ridwanulah AdewaleNo ratings yet
- Ultrasonic Couplant MSDSDocument2 pagesUltrasonic Couplant MSDSAnonymous uhqwokAeU0No ratings yet
- Forum Ex 2 2Document5 pagesForum Ex 2 2Didan EnricoNo ratings yet
- Lesson 2 - Procedures in Cleaning Utensils and EquipmentDocument26 pagesLesson 2 - Procedures in Cleaning Utensils and EquipmentReizel TulauanNo ratings yet
- Taco Bell - Re EngineeringDocument6 pagesTaco Bell - Re Engineeringabcxyz2811100% (6)
- ALGEBRA Groups 1Document34 pagesALGEBRA Groups 1bravemacnyNo ratings yet
- 3152-4 Data SheetDocument2 pages3152-4 Data SheetPhuongNguyenDinhNo ratings yet
- Chapter 5 Perfect CompetitionDocument20 pagesChapter 5 Perfect Competition刘文雨杰No ratings yet
- Saura, Jasmin E. - DVM - 2B Biochemistry (Activity 2)Document2 pagesSaura, Jasmin E. - DVM - 2B Biochemistry (Activity 2)Jasmin SauraNo ratings yet
- The 9 Building Blocks of Business ModelsDocument3 pagesThe 9 Building Blocks of Business ModelsTobeFrankNo ratings yet
- About WELDA Anchor PlateDocument1 pageAbout WELDA Anchor PlateFircijevi KurajberiNo ratings yet
- WholeDocument397 pagesWholedelbot01No ratings yet