You might also like
- Yachting Start to Finish: From Beginner to Advanced: The Perfect Guide to Improving Your Yachting SkillsFrom EverandYachting Start to Finish: From Beginner to Advanced: The Perfect Guide to Improving Your Yachting SkillsNo ratings yet
- Passenger Ship in A Shipyard at Papenburg, Ger. © Meyer-Werft/Press and Information Office of TheDocument69 pagesPassenger Ship in A Shipyard at Papenburg, Ger. © Meyer-Werft/Press and Information Office of TheVinoth KumarNo ratings yet
- ABS Parametric RollDocument2 pagesABS Parametric RollAdvan Zuidplas100% (1)
- Illustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningFrom EverandIllustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningRating: 3.5 out of 5 stars3.5/5 (2)
- Why Ships Fail in MidshipDocument6 pagesWhy Ships Fail in MidshipRohit KakadeNo ratings yet
- ASD TugsDocument3 pagesASD TugsVaruna Shantha100% (1)
- ShipDocument88 pagesShipGiorgi KandelakiNo ratings yet
- Project (Sajjat Mistry For Grse)Document11 pagesProject (Sajjat Mistry For Grse)Souvik SamantaNo ratings yet
- 9 10 TH Week Seam 2Document13 pages9 10 TH Week Seam 2Carlo ValdezNo ratings yet
- Sea KeepingDocument4 pagesSea KeepingLuis ClaudeNo ratings yet
- Ship Stability at The Management LevelDocument4 pagesShip Stability at The Management LevelShree Kanha100% (1)
- Engineering The Sailboat-Safety in NumbersDocument11 pagesEngineering The Sailboat-Safety in NumbershaujesNo ratings yet
- WS NotesDocument7 pagesWS NotesYanyan2009No ratings yet
- Aero-Hydrodynamics of An RS:X Olympic Racing Sailboard:, IncludingDocument18 pagesAero-Hydrodynamics of An RS:X Olympic Racing Sailboard:, IncludingOliwier UrbańskiNo ratings yet
- General Sailing WikiDocument90 pagesGeneral Sailing WikiarklazakNo ratings yet
- Ship Manoeuvring 2Document10 pagesShip Manoeuvring 2nyshauna strachanNo ratings yet
- Parametric RollDocument3 pagesParametric RollDnv BaileyNo ratings yet
- Coupled CFD and Structural Analysis For World Outright Sailing Speed Record PreparationsDocument17 pagesCoupled CFD and Structural Analysis For World Outright Sailing Speed Record PreparationsLucas WeissNo ratings yet
- Parametric RollingDocument3 pagesParametric RollingNitin JaiswalNo ratings yet
- Anchoring of Large Container Ships v0Document4 pagesAnchoring of Large Container Ships v0Alin BAMNo ratings yet
- The Measurement of Weight Distribution of Olympic Class Dinghies and KeelboatsDocument32 pagesThe Measurement of Weight Distribution of Olympic Class Dinghies and KeelboatsPeter HinrichsenNo ratings yet
- Fuzzy Control of A SailboatDocument17 pagesFuzzy Control of A SailboatOscarFerrerRibasNo ratings yet
- Rolling of ShipsDocument37 pagesRolling of ShipsMark Antolino75% (8)
- A Ship's Hull Endures Harsh Conditions at Sea, As Illustrated by This Reefer Ship in Bad WeatherDocument10 pagesA Ship's Hull Endures Harsh Conditions at Sea, As Illustrated by This Reefer Ship in Bad Weathernetname1No ratings yet
- Sos - Key (2015-16 Ay)Document18 pagesSos - Key (2015-16 Ay)DODDI PRASADNo ratings yet
- Ship StabilityDocument5 pagesShip StabilityRachmat Hidayat SapwariNo ratings yet
- Anchor WorkDocument18 pagesAnchor WorkDiwakar SinghNo ratings yet
- International Moth HydrofoilDocument20 pagesInternational Moth HydrofoilMorgan Rook100% (1)
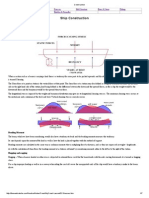
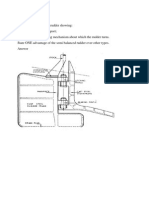
- Ship ConstructionDocument7 pagesShip Constructionpramodkb_cusatNo ratings yet
- What Is Baseline of A ShipDocument11 pagesWhat Is Baseline of A ShipSwarg Vibha100% (1)
- SMSC-1400-01 - Answer KeysDocument5 pagesSMSC-1400-01 - Answer KeysAmir SoleimanyNo ratings yet
- Lauinching Evaluation by Numerical Simulations: Stefan Krueger, TU Hamburg-Harburg, GermanyDocument9 pagesLauinching Evaluation by Numerical Simulations: Stefan Krueger, TU Hamburg-Harburg, GermanyRAJESH GANESANNo ratings yet
- 01a-3.3.2 - TugsDocument21 pages01a-3.3.2 - TugsRajiv VigNo ratings yet
- Check Your Keel-Paul BogatajDocument5 pagesCheck Your Keel-Paul Bogatajklzsailing100% (1)
- Understanding Heavy Lifting Operations and Vessel StabilityDocument6 pagesUnderstanding Heavy Lifting Operations and Vessel StabilityGiorgi KandelakiNo ratings yet
- Sailing ManualDocument113 pagesSailing ManualTomislav PavicicNo ratings yet
- Planning+and+Design+of+Water+Area UnlockedDocument37 pagesPlanning+and+Design+of+Water+Area Unlocked蓉蓉100% (1)
- Dry Docking OperationsDocument5 pagesDry Docking Operationshutsonianp100% (2)
- Behavior and Handling of Ship PDFDocument62 pagesBehavior and Handling of Ship PDFtritam100% (4)
- Day 4Document7 pagesDay 4MALIK TALHA ALI SAJIDNo ratings yet
- Geometry of Ships and Ship-Shaped Deepwater Floating SystemsDocument55 pagesGeometry of Ships and Ship-Shaped Deepwater Floating SystemsKrishnan ChockalingamNo ratings yet
- Dynamical Models of Extreme Rolling of Vessels in Head WavesDocument27 pagesDynamical Models of Extreme Rolling of Vessels in Head WavesOscar Sacases PlanasNo ratings yet
- Ship Tug InteractionDocument7 pagesShip Tug InteractionDrSuchitra Choudhary100% (4)
- Understanding Different Types of Manoeuvres of A VesselDocument9 pagesUnderstanding Different Types of Manoeuvres of A VesselGiorgi Kandelaki100% (1)
- Ship StressesDocument7 pagesShip StressesSumit Sinha50% (2)
- D.G Ov .Au: 1.0 PreparationDocument9 pagesD.G Ov .Au: 1.0 PreparationNgaire TaylorNo ratings yet
- Strength of ShipsDocument6 pagesStrength of ShipskrutarthpatraNo ratings yet
- Class4 Question & Answers Ship ConstDocument48 pagesClass4 Question & Answers Ship ConstNarine100% (2)
- Naval Architecture: Ship, Any Large Floating Vessel Capable of Crossing Open Waters, As Opposed ToDocument5 pagesNaval Architecture: Ship, Any Large Floating Vessel Capable of Crossing Open Waters, As Opposed ToChristianNo ratings yet
- T Foil RuddersDocument4 pagesT Foil RuddersSlavi72No ratings yet
- Effects of Tide and Wind in Ship HandlingDocument19 pagesEffects of Tide and Wind in Ship Handlingpolaris25100% (8)
- Cargo Handling - 2-2Document16 pagesCargo Handling - 2-2Beyza AlacagözNo ratings yet
- Fender Design CriteriaDocument9 pagesFender Design CriteriaOladunni AfolabiNo ratings yet
- Welcome To International Journal of Engineering Research and Development (IJERD)Document9 pagesWelcome To International Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- The Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Document19 pagesThe Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Panagiotis Mouzenidis100% (1)
- Roll Moment of InertiaDocument14 pagesRoll Moment of InertiaMarian IgescuNo ratings yet
- Hull DamageDocument14 pagesHull DamageIslamHashemNo ratings yet
- Hydrodynamic Analysis Techniques For High-Speed Planing Hulls-Reza YousefiDocument9 pagesHydrodynamic Analysis Techniques For High-Speed Planing Hulls-Reza YousefiFernandocf90No ratings yet
- BG Product Identification and AT Status V1.3Document30 pagesBG Product Identification and AT Status V1.3BetaLavalNo ratings yet
- The Maltese Falcon Rigging, Dijkstra@Hiswasymposium 2004Document30 pagesThe Maltese Falcon Rigging, Dijkstra@Hiswasymposium 2004BetaLavalNo ratings yet
- 1615468301bosch Rexroth Sydz0001 Valvola Valve Re29255Document4 pages1615468301bosch Rexroth Sydz0001 Valvola Valve Re29255BetaLavalNo ratings yet
- Fireplace PDFDocument6 pagesFireplace PDFAndres NuñezNo ratings yet
- Electrical ProductsDocument112 pagesElectrical ProductsmastersujayNo ratings yet
- 7173-K Manual 2012Document22 pages7173-K Manual 2012BetaLavalNo ratings yet
- Ac Motors EbookDocument74 pagesAc Motors EbookHammad MalikNo ratings yet
- Marine RadarDocument8 pagesMarine RadarBetaLavalNo ratings yet
- Model Based MindDocument6 pagesModel Based MindBetaLavalNo ratings yet
- MCA Squall CurvesDocument20 pagesMCA Squall CurvesBatulicinNo ratings yet
- Clarke Wireless World ArticleDocument4 pagesClarke Wireless World ArticleRoidar AliNo ratings yet
- Furuno FA-100 Connections To PCDocument3 pagesFuruno FA-100 Connections To PCBetaLavalNo ratings yet
- MAB100Document2 pagesMAB100Sathish JonnalaNo ratings yet
- LAN Cabling: Straight ThroughDocument3 pagesLAN Cabling: Straight ThroughGemma Quiocho-CardenasNo ratings yet
- RXM XXX ES Data GuideDocument11 pagesRXM XXX ES Data GuideAstrid PorticaNo ratings yet
- West Knits Book 3Document56 pagesWest Knits Book 3Alexandr Maxiuta100% (17)
- Art Class Curator Elements and Principles Printable Pack PDFDocument9 pagesArt Class Curator Elements and Principles Printable Pack PDFhelen karm100% (1)
- Guidelines For Utility Impact Assessment For Local Roads in Developed Areas MME 2012 Cross-SectionDocument81 pagesGuidelines For Utility Impact Assessment For Local Roads in Developed Areas MME 2012 Cross-Sectionirfan mohammedNo ratings yet
- MAE 322 Machine Design: Dr. Hodge Jenkins Mercer UniversityDocument20 pagesMAE 322 Machine Design: Dr. Hodge Jenkins Mercer UniversityDuslerinalargaNo ratings yet
- Red Bin Analysis PDF Notes - 10020477 - 2023 - 10 - 13 - 09 - 28Document7 pagesRed Bin Analysis PDF Notes - 10020477 - 2023 - 10 - 13 - 09 - 28Sameer SutarNo ratings yet
- 3L11/3F11 SERIES / " Bimetal Disc ThermostatsDocument2 pages3L11/3F11 SERIES / " Bimetal Disc ThermostatsBuitinės Technikos RemontasNo ratings yet
- Juki Revised Top BotDocument12 pagesJuki Revised Top BotFabio GonzalezNo ratings yet
- Ashton and Feldman 2003. BERGMANN'S RULE IN NONAVIAN REPTILES - TURTLES FOLLOW IT, LIZARDS AND SNAKE REVERSE IT PDFDocument13 pagesAshton and Feldman 2003. BERGMANN'S RULE IN NONAVIAN REPTILES - TURTLES FOLLOW IT, LIZARDS AND SNAKE REVERSE IT PDFFred LimaNo ratings yet
- GGDocument8 pagesGGGaurav SharmaNo ratings yet
- SIF Corporate-Presentatie 2017Document35 pagesSIF Corporate-Presentatie 201766apenlullenNo ratings yet
- JVR Fingerprint Attendance User ManualDocument30 pagesJVR Fingerprint Attendance User ManualDomingo MonteroNo ratings yet
- Palette For Colorfastness PilotDocument25 pagesPalette For Colorfastness Pilotjenal aripinNo ratings yet
- State Load Despatch Centre (SLDC), Patna: Bihar State Power Transmission Co. LTDDocument10 pagesState Load Despatch Centre (SLDC), Patna: Bihar State Power Transmission Co. LTDsldcNo ratings yet
- Body FluidsDocument85 pagesBody FluidsShanta BharNo ratings yet
- TEK SAP 08 SodtwareArch ShowfilesDocument42 pagesTEK SAP 08 SodtwareArch Showfilesapi-3759021No ratings yet
- Force Vectors: Scalars and Vectors 2D and 3D Force SystemsDocument20 pagesForce Vectors: Scalars and Vectors 2D and 3D Force Systemsdanaluca2753No ratings yet
- Shape of Water in Rotating Bucket - Physics Stack ExchangeDocument3 pagesShape of Water in Rotating Bucket - Physics Stack ExchangeHector TrianaNo ratings yet
- 1.bitwise OperatorsDocument2 pages1.bitwise OperatorsPaul kollamNo ratings yet
- Cantors Algebra of SetsDocument29 pagesCantors Algebra of SetsKevs SebastianNo ratings yet
- Ordinal Logistic Regression: 13.1 BackgroundDocument15 pagesOrdinal Logistic Regression: 13.1 BackgroundShan BasnayakeNo ratings yet
- IV Dam Outlet Work1Document33 pagesIV Dam Outlet Work1hailish100% (1)
- Prime Number FactorizationDocument10 pagesPrime Number FactorizationedithaenriquezNo ratings yet
- Thumb Rules For Civil Engineers PDFDocument4 pagesThumb Rules For Civil Engineers PDFA KNo ratings yet
- Seam Strength of Corrugated Plate With High Strength SteelDocument15 pagesSeam Strength of Corrugated Plate With High Strength SteelMariano SalcedoNo ratings yet
- S32K14X RM Rev 4Document1,929 pagesS32K14X RM Rev 4Nguyễn Duy HùngNo ratings yet
- Table and Graph CriteriaDocument3 pagesTable and Graph Criteriaapi-271250844No ratings yet
- Assignment and Exam Content: Always Delete Your Cloud Resources To Avoid $$ ChargesDocument11 pagesAssignment and Exam Content: Always Delete Your Cloud Resources To Avoid $$ ChargesMouhamadou NdiayeNo ratings yet
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (138)
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresFrom EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresRating: 1 out of 5 stars1/5 (2)
- Advanced Modelling Techniques in Structural DesignFrom EverandAdvanced Modelling Techniques in Structural DesignRating: 5 out of 5 stars5/5 (3)
- Structural Cross Sections: Analysis and DesignFrom EverandStructural Cross Sections: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (19)
- Marine Structural Design CalculationsFrom EverandMarine Structural Design CalculationsRating: 4.5 out of 5 stars4.5/5 (13)
- Pocket Guide to Flanges, Fittings, and Piping DataFrom EverandPocket Guide to Flanges, Fittings, and Piping DataRating: 3.5 out of 5 stars3.5/5 (22)
- Flow-Induced Vibrations: Classifications and Lessons from Practical ExperiencesFrom EverandFlow-Induced Vibrations: Classifications and Lessons from Practical ExperiencesTomomichi NakamuraRating: 4.5 out of 5 stars4.5/5 (4)
- Working Guide to Pump and Pumping Stations: Calculations and SimulationsFrom EverandWorking Guide to Pump and Pumping Stations: Calculations and SimulationsRating: 5 out of 5 stars5/5 (3)
- Bridge Engineering: Classifications, Design Loading, and Analysis MethodsFrom EverandBridge Engineering: Classifications, Design Loading, and Analysis MethodsRating: 4 out of 5 stars4/5 (16)
- Pile Design and Construction Rules of ThumbFrom EverandPile Design and Construction Rules of ThumbRating: 4.5 out of 5 stars4.5/5 (15)
- Advanced Design Examples of Seismic Retrofit of StructuresFrom EverandAdvanced Design Examples of Seismic Retrofit of StructuresRating: 1 out of 5 stars1/5 (1)
- Green Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsFrom EverandGreen Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsNo ratings yet
- Climate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingFrom EverandClimate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingNo ratings yet