You might also like
- Boundary Layer and Flow Control: Its Principles and ApplicationFrom EverandBoundary Layer and Flow Control: Its Principles and ApplicationNo ratings yet
- The Unsteady Wake of An Oscillating Cylinder at Low Reynolds NumberDocument10 pagesThe Unsteady Wake of An Oscillating Cylinder at Low Reynolds NumberManu K VasudevanNo ratings yet
- 74SmithKlineTransitoryStall PDFDocument6 pages74SmithKlineTransitoryStall PDFmyskyshepherdNo ratings yet
- 1 s2.0 014102969592643M MainDocument7 pages1 s2.0 014102969592643M Mainyusep ramdaniNo ratings yet
- Turbulence Production in Flow Over A Wavy WallDocument9 pagesTurbulence Production in Flow Over A Wavy Wallsouliemana ibnou ahmedNo ratings yet
- Supersonic Flow Control: S. B. Verma A. HadjadjDocument7 pagesSupersonic Flow Control: S. B. Verma A. HadjadjMarwan DhibNo ratings yet
- Rsta 2010 0362Document17 pagesRsta 2010 0362varun karthikeyanNo ratings yet
- PIV Measurements of Flow Over A Riblet SurfaceDocument8 pagesPIV Measurements of Flow Over A Riblet Surfacemuka osmanNo ratings yet
- Moving Wall UDf ExampleDocument6 pagesMoving Wall UDf Exampleqasim zaheerNo ratings yet
- CHAMANI e RAJARATNAM 1994Document6 pagesCHAMANI e RAJARATNAM 1994Valter AlbinoNo ratings yet
- Flooding and Hysteresis Effects in Nearly-Horizontal Countercurrent Stratified Steam-Water Flow?Document8 pagesFlooding and Hysteresis Effects in Nearly-Horizontal Countercurrent Stratified Steam-Water Flow?Javier E. Guerrero ArrietaNo ratings yet
- A34Stokes Sound PDFDocument5 pagesA34Stokes Sound PDFام علي العلويه للرقيهNo ratings yet
- Ramon, Oron - 2008 - Capillary Rise of A Meniscus With Phase ChangeDocument7 pagesRamon, Oron - 2008 - Capillary Rise of A Meniscus With Phase ChangeGuy RamonNo ratings yet
- Flapping FoilDocument11 pagesFlapping FoilEntertainment GamingNo ratings yet
- Eddy Viscosity: Adoc 4060/5060 Spring 2013 Chris JenkinsDocument17 pagesEddy Viscosity: Adoc 4060/5060 Spring 2013 Chris JenkinsGiovannaNo ratings yet
- Vortex Excitation of Metal BellowsDocument8 pagesVortex Excitation of Metal BellowsMourad BenabderrahmaneNo ratings yet
- Tsahal Is 1982Document10 pagesTsahal Is 1982cmkohNo ratings yet
- Computation of The Optimal Sensor Location For The Estimation of An 1-D Linear Dispersive Wave EquationDocument6 pagesComputation of The Optimal Sensor Location For The Estimation of An 1-D Linear Dispersive Wave EquationGauravSethNo ratings yet
- Cross-Flow Vibrations of A Pipe Close To A Rigid Boundary: V.JacobsenDocument7 pagesCross-Flow Vibrations of A Pipe Close To A Rigid Boundary: V.Jacobsen李智No ratings yet
- 23 37 PMR Jan08Document7 pages23 37 PMR Jan08Majid KhanNo ratings yet
- Positive Streamer Propagation in Large Oil: Experimental Characterization of Propagation ModesDocument11 pagesPositive Streamer Propagation in Large Oil: Experimental Characterization of Propagation ModesAlberto OrtizNo ratings yet
- Computational Analysis of Naturally Oscillating Tandem Square and Circular Bluff Bodies A GPU Based Immersed Boundary Lattice Boltzmann ApproachDocument24 pagesComputational Analysis of Naturally Oscillating Tandem Square and Circular Bluff Bodies A GPU Based Immersed Boundary Lattice Boltzmann ApproachEhsan AdeebNo ratings yet
- Mag 11 29Document16 pagesMag 11 29tran phamNo ratings yet
- Soliman Et Al. - 1968 - A General Heat Transfer Correlation For Annular FLDocument8 pagesSoliman Et Al. - 1968 - A General Heat Transfer Correlation For Annular FLMartinNo ratings yet
- 1008 2294 PDFDocument17 pages1008 2294 PDFالاسمر الجنوبيNo ratings yet
- Numerical Modelling of Vortex Induced VibrationsDocument6 pagesNumerical Modelling of Vortex Induced VibrationscteranscribdNo ratings yet
- Hydrofoil Roughness Effects On Von Kármán Vortex Shedding: Philippe AUSONI Mohamed FARHATDocument4 pagesHydrofoil Roughness Effects On Von Kármán Vortex Shedding: Philippe AUSONI Mohamed FARHATFabio FolpiniNo ratings yet
- Yang (2016) Mooring Line Damping Due To Low-Frequency Superimposed With Wave-Frequency Random Line Top End MotionDocument10 pagesYang (2016) Mooring Line Damping Due To Low-Frequency Superimposed With Wave-Frequency Random Line Top End MotionkometmayorNo ratings yet
- EMCRoma98 1Document4 pagesEMCRoma98 1DejanNo ratings yet
- 2016 Improvement of The Acoustic Black Hole Effect by Using Energy Transfer Due To Geometric NonlinearityDocument12 pages2016 Improvement of The Acoustic Black Hole Effect by Using Energy Transfer Due To Geometric Nonlinearitydhiraj.biswasNo ratings yet
- Effect of Thermal Buoyancy On A Fluid Flowing Past A Pair of Side-By-Side Square Bluff-Bodies in A Low-Reynolds Number Flow RegimeDocument1 pageEffect of Thermal Buoyancy On A Fluid Flowing Past A Pair of Side-By-Side Square Bluff-Bodies in A Low-Reynolds Number Flow Regimeঅনিরুদ্ধ সান্যালNo ratings yet
- Isaacson Et Al 1999Document11 pagesIsaacson Et Al 1999RIOS TSENGNo ratings yet
- On The Galloping Instability of Two-Dimensional Bodies Having Elliptical Cross-SectionsDocument11 pagesOn The Galloping Instability of Two-Dimensional Bodies Having Elliptical Cross-SectionsAndreea MunteanuNo ratings yet
- Renewable Energy: Macheng Shen, Zhiqiang Hu, Geliang LiuDocument13 pagesRenewable Energy: Macheng Shen, Zhiqiang Hu, Geliang LiuAhmadFahcruddinNo ratings yet
- Suppression of Von Karman Vortex Streets Past PoDocument31 pagesSuppression of Von Karman Vortex Streets Past PoLuis PressoNo ratings yet
- Outer Layer Similarity and Energy Transfer in A Rough Wall Turbulent Channel Flow 4Document1 pageOuter Layer Similarity and Energy Transfer in A Rough Wall Turbulent Channel Flow 4Massinissa RialNo ratings yet
- Jmoeex 114 2 91 1 PDFDocument13 pagesJmoeex 114 2 91 1 PDFhankNo ratings yet
- Corbi No 2006Document7 pagesCorbi No 2006nadamopNo ratings yet
- Streamer Generation and Propagation in Transformer Oil Under Ac Divergent Field ConditionsDocument14 pagesStreamer Generation and Propagation in Transformer Oil Under Ac Divergent Field ConditionsAlberto OrtizNo ratings yet
- 1-s2.0-S0377025720301658-main 大波小波Document12 pages1-s2.0-S0377025720301658-main 大波小波丫丫衣衣No ratings yet
- Vortex Shedding and Lock-On in A Perturbed Flow: Mary S. HallDocument9 pagesVortex Shedding and Lock-On in A Perturbed Flow: Mary S. HallManu K VasudevanNo ratings yet
- Nwogu Omae 1991Document6 pagesNwogu Omae 1991mohdsolihat1No ratings yet
- Chin MeasSciTech 2009 PremultipledSpectra PDFDocument11 pagesChin MeasSciTech 2009 PremultipledSpectra PDFSanjeet KumarNo ratings yet
- A Simplified Model Predicting The Kelvin-Helmholtz Instability Frequency For - Simoni Et AlDocument6 pagesA Simplified Model Predicting The Kelvin-Helmholtz Instability Frequency For - Simoni Et Al赵伯驹No ratings yet
- Observations of Gravity WavesDocument6 pagesObservations of Gravity WavesVermilion~No ratings yet
- Numerical Study On Dynamic Behavior of Entrapped Air in A Partially Filled PipeDocument10 pagesNumerical Study On Dynamic Behavior of Entrapped Air in A Partially Filled Pipesherio amrousyNo ratings yet
- Case Studies in Pipeline Free Span FatigueDocument10 pagesCase Studies in Pipeline Free Span FatiguejoaogularNo ratings yet
- Conwectiwe Heat Transfer by Impingement of Circular Liquid: X. LiuDocument12 pagesConwectiwe Heat Transfer by Impingement of Circular Liquid: X. LiuKetan GanatraNo ratings yet
- Passive Suppression of Nonlinear Panel Flutter Using Piezoelectric Materials With Resonant CircuitDocument12 pagesPassive Suppression of Nonlinear Panel Flutter Using Piezoelectric Materials With Resonant CircuitYonghui XUNo ratings yet
- F M D C: Luid Echanics in The Riven AvityDocument45 pagesF M D C: Luid Echanics in The Riven AvitydindarkarNo ratings yet
- A Priori and A Posteriori Tests of Inflow ConditioDocument18 pagesA Priori and A Posteriori Tests of Inflow ConditioTestNo ratings yet
- Aiaa 2000-0930Document20 pagesAiaa 2000-0930NeoNo ratings yet
- Behrens 1971Document7 pagesBehrens 1971sathycimNo ratings yet
- Malamataris NA Balakotaiah AIChE 2008Document16 pagesMalamataris NA Balakotaiah AIChE 2008Behnam CheraghiNo ratings yet
- Miau 1990Document7 pagesMiau 1990amirNo ratings yet
- Rufer Et Kezios - 1966 - Analysis of Two-Phase, One-Component Stratified FLDocument8 pagesRufer Et Kezios - 1966 - Analysis of Two-Phase, One-Component Stratified FLMartinNo ratings yet
- A Review of Effects of Initial and Boundary Conditions On Turbulent Jets, 2010 (H, Region)Document19 pagesA Review of Effects of Initial and Boundary Conditions On Turbulent Jets, 2010 (H, Region)Dong Hyun KimNo ratings yet
- Characteristics and Dynamics of Compressible Cavitating Flows With Special Emphasis On Compressibility EffectsDocument27 pagesCharacteristics and Dynamics of Compressible Cavitating Flows With Special Emphasis On Compressibility EffectsQianZHNo ratings yet
- Proceedings of The 13-th (2003) ConferenceDocument7 pagesProceedings of The 13-th (2003) ConferenceYuriy KrayniyNo ratings yet
- 1994 Hydrodynamic Heave Damping Estimation and Scaling For Tension Leg PlatformsDocument7 pages1994 Hydrodynamic Heave Damping Estimation and Scaling For Tension Leg Platformsshubham khodiyarNo ratings yet
- A Comprehensive Review of Nano-Enhanced Phase Change Materials On Solar 2022Document30 pagesA Comprehensive Review of Nano-Enhanced Phase Change Materials On Solar 2022Gopi KrishnaNo ratings yet
- A Review of Potential Materials For Thermal Energy Storage in Building ApplicationsDocument23 pagesA Review of Potential Materials For Thermal Energy Storage in Building ApplicationsGopi KrishnaNo ratings yet
- J Ijheatmasstransfer 2006 02 058Document13 pagesJ Ijheatmasstransfer 2006 02 058Gopi KrishnaNo ratings yet
- S002211200200232XDocument24 pagesS002211200200232XGopi KrishnaNo ratings yet
- Numerical Simulation of Two-Dimensional Laminar Incompressible Wall Jet Flow Under Backward-Facing StepDocument13 pagesNumerical Simulation of Two-Dimensional Laminar Incompressible Wall Jet Flow Under Backward-Facing StepGopi KrishnaNo ratings yet
- J Ijheatmasstransfer 2013 12 042Document7 pagesJ Ijheatmasstransfer 2013 12 042Gopi KrishnaNo ratings yet
- Review of Development Survey of Phase Change Material 2014Document12 pagesReview of Development Survey of Phase Change Material 2014Gopi KrishnaNo ratings yet
- Elements of Crystallography NewDocument8 pagesElements of Crystallography NewGopi KrishnaNo ratings yet
- Numerical Investigation of Phase Change Material Assisted Indirect Solar Dryer For Food Quality Preservation 2023Document41 pagesNumerical Investigation of Phase Change Material Assisted Indirect Solar Dryer For Food Quality Preservation 2023Gopi KrishnaNo ratings yet
- Mcqs Full Book (Chem)Document7 pagesMcqs Full Book (Chem)Shiraz MushtaqNo ratings yet
- Numerical Simulation of Solidification and Melting Problems Using Ansys Fluent 16.2 PDFDocument40 pagesNumerical Simulation of Solidification and Melting Problems Using Ansys Fluent 16.2 PDFAntarim Dutta50% (2)
- Engineering Properties of SoilsDocument178 pagesEngineering Properties of SoilsAndrewNo ratings yet
- Service Manual PWC215TDocument11 pagesService Manual PWC215TJovie GrohlNo ratings yet
- Enzymes: Mrs Neha Srivastava Faculty of Pharmacy Punjab College of Technical Education LudhianaDocument22 pagesEnzymes: Mrs Neha Srivastava Faculty of Pharmacy Punjab College of Technical Education Ludhiananeha100% (1)
- Equipment DesignDocument88 pagesEquipment DesignbigbossNo ratings yet
- 1454394350P04 M12E-TextNewDocument16 pages1454394350P04 M12E-TextNewayushprofsnlNo ratings yet
- 量子计算机的研究Document6 pages量子计算机的研究William WangNo ratings yet
- 4 Classical Problems of Rigid Body MechanicsDocument2 pages4 Classical Problems of Rigid Body MechanicsPauMarCorNo ratings yet
- Material Science and Engineering: Engr. Joseph Benedict N. PrimDocument107 pagesMaterial Science and Engineering: Engr. Joseph Benedict N. PrimJOSEPH BENEDICT PRIMNo ratings yet
- CD 225 Revision 1 Design For New Pavement Foundations-WebDocument49 pagesCD 225 Revision 1 Design For New Pavement Foundations-WebJOENo ratings yet
- USP-NF Acebutolol HydrochlorideDocument4 pagesUSP-NF Acebutolol HydrochlorideStalin VacaNo ratings yet
- Cyclodextrins - Ebook - 2015 UL PuskásDocument28 pagesCyclodextrins - Ebook - 2015 UL PuskásAlessio MelisNo ratings yet
- General Physics 2: Quarter 4 - Week 1Document21 pagesGeneral Physics 2: Quarter 4 - Week 1Ralph QuiambaoNo ratings yet
- Datasheet Wesgo Ceramics Al500Document2 pagesDatasheet Wesgo Ceramics Al500hemanth_85No ratings yet
- ThesisDocument126 pagesThesisWahab ApoeNo ratings yet
- Lesson 1 Whole Numbers Mathematics IntermediateDocument10 pagesLesson 1 Whole Numbers Mathematics IntermediateAlbec Sagrado BallacarNo ratings yet
- Aquapak Repulpability Assessment 25 April 2019 PDFDocument15 pagesAquapak Repulpability Assessment 25 April 2019 PDFchinchotarngNo ratings yet
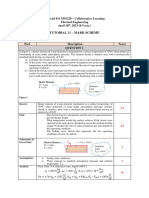
- Tutorial 11 - MS3220 Rekayasa Termal (Mark Scheme)Document6 pagesTutorial 11 - MS3220 Rekayasa Termal (Mark Scheme)i need documentsNo ratings yet
- Kora KoraDocument8 pagesKora Korayorry25No ratings yet
- The Binary Stars 1918Document350 pagesThe Binary Stars 1918jburleson11100% (1)
- Matlab CodeDocument5 pagesMatlab CodeSri Varalakshmi MummidiNo ratings yet
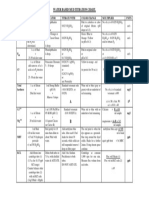
- Water Based Mud Titration Chart.: Test Sample Indicator Titrate With Color Change Multiplier Units PF Cc'sDocument1 pageWater Based Mud Titration Chart.: Test Sample Indicator Titrate With Color Change Multiplier Units PF Cc'sjamesNo ratings yet
- API - 571 - 2020 - JonasDocument71 pagesAPI - 571 - 2020 - JonasjonaspathroseNo ratings yet
- Quarter 2 - MELC 7 Week 4: General Biology 1 Activity SheetDocument8 pagesQuarter 2 - MELC 7 Week 4: General Biology 1 Activity SheetMary Kate AdelleNo ratings yet
- Spec Disodium 5-RibonucleotidesDocument1 pageSpec Disodium 5-RibonucleotidesFerdian Iwank IriyantoNo ratings yet
- General Biology: Peralta III Edwin C. STEM-GalileoDocument10 pagesGeneral Biology: Peralta III Edwin C. STEM-GalileoSavage CabbageNo ratings yet
- Class XII Chemistry Practical Record Vol2Document22 pagesClass XII Chemistry Practical Record Vol2yashrevasya2006No ratings yet
- Matter and ChangeDocument23 pagesMatter and ChangeDionisio BrinosaNo ratings yet