You might also like
- Clase 7 (División) 30-06-20Document5 pagesClase 7 (División) 30-06-20Pier NavarroNo ratings yet
- 2.2 Implicit Differentiation and Higher Order DerivativesDocument7 pages2.2 Implicit Differentiation and Higher Order DerivativesFabie Barcenal100% (1)
- Lecture 13 - Angular DeformationDocument9 pagesLecture 13 - Angular DeformationjaggumeenaiitdNo ratings yet
- Elements de Volume Cylindrique Et SpheriqueDocument1 pageElements de Volume Cylindrique Et Spheriqueadrame ndiayeNo ratings yet
- Q4 LC41 Trigonometric RatiosDocument29 pagesQ4 LC41 Trigonometric RatiosPaul John PachecoNo ratings yet
- BM Sharma FigureDocument38 pagesBM Sharma FigureShashank ShekharNo ratings yet
- Fluid Mechanics LectureDocument10 pagesFluid Mechanics LectureJames Ivan AnoreNo ratings yet
- Electric Flux Density, Gauss Law, Divergence PDFDocument35 pagesElectric Flux Density, Gauss Law, Divergence PDFSubhan MansoorNo ratings yet
- Negative Exponents: Directions: Find The Correct Answer. Use Your Answer To Navigate Through The Maze. Show Your WorkDocument2 pagesNegative Exponents: Directions: Find The Correct Answer. Use Your Answer To Navigate Through The Maze. Show Your WorkClow IslasNo ratings yet
- Sec1 PDFDocument7 pagesSec1 PDFHanin GamalNo ratings yet
- Service Manual: KD-27FS170 KD-32FS170 KD-36FS170Document13 pagesService Manual: KD-27FS170 KD-32FS170 KD-36FS170sonytekNo ratings yet
- Lecture 2 - Description (00-12-01)Document50 pagesLecture 2 - Description (00-12-01)MahdiNo ratings yet
- Basic MathematicsDocument16 pagesBasic MathematicsGeethika SriNo ratings yet
- Laboratory Experiment 5 - Gonzales-ZairusDocument5 pagesLaboratory Experiment 5 - Gonzales-Zairuszairus gonzalesNo ratings yet
- FNDocument2 pagesFNArley PabonNo ratings yet
- Circular MotionDocument11 pagesCircular MotionOmar NadeemNo ratings yet
- A231 - BWFF2033 - List of Formula - Mid Sem Exam v2Document2 pagesA231 - BWFF2033 - List of Formula - Mid Sem Exam v2anisah alieasNo ratings yet
- Derivative Trigonometric FunctionsDocument13 pagesDerivative Trigonometric FunctionsMary Joy LascuñaNo ratings yet
- Formulario Examen - Análisis de EEFFDocument2 pagesFormulario Examen - Análisis de EEFFDaniel Ramos Tres SesentaNo ratings yet
- Lecture 1 JapDocument9 pagesLecture 1 JapFanyMustaineeNo ratings yet
- Lecture 4 - Energy Demand (Maco-Level)Document40 pagesLecture 4 - Energy Demand (Maco-Level)Goh Kay YunNo ratings yet
- Clases 04 Al 050919 F Is PropDocument53 pagesClases 04 Al 050919 F Is PropMicael SorianoNo ratings yet
- Lec#6, Torsion-2 StudentDocument21 pagesLec#6, Torsion-2 Studentchristianborlaza23No ratings yet
- 캐리어에어컨Document32 pages캐리어에어컨dy kangNo ratings yet
- ぼらりん(安城市民活動センター、ボランティア・リンク・メッセージ2009年春)Document2 pagesぼらりん(安城市民活動センター、ボランティア・リンク・メッセージ2009年春)Taira SakakibaraNo ratings yet
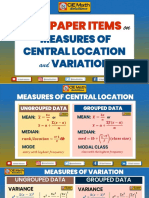
- Past Paper Items On Measures of Central Locationa and VariationDocument13 pagesPast Paper Items On Measures of Central Locationa and VariationFelicio DelibertoNo ratings yet
- Special Math 4 Improper To Mixed NumberDocument7 pagesSpecial Math 4 Improper To Mixed NumberRowly Pearl NedicNo ratings yet
- Temp 1Document1 pageTemp 1MadyNo ratings yet
- ME G511 Lect 25 Equation of Motion Nov 2018Document23 pagesME G511 Lect 25 Equation of Motion Nov 2018Vipul AgrawalNo ratings yet
- ᳹કᶰࢦᶛ Before you read: 朗読音声のダウンロード Audio downloadDocument10 pages᳹કᶰࢦᶛ Before you read: 朗読音声のダウンロード Audio downloadtahatell.2005No ratings yet
- Shane MathDocument3 pagesShane MathMary Grace UlgasanNo ratings yet
- Kewan Ingkang Pethel Sanget 1Document3 pagesKewan Ingkang Pethel Sanget 1morenokevin17102007No ratings yet
- AlapbethDocument75 pagesAlapbethmaverickpussNo ratings yet
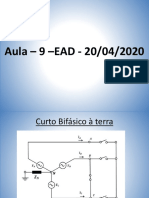
- Aula 9 EAD 20 04 20Document22 pagesAula 9 EAD 20 04 20Wembley OliveiraNo ratings yet
- Detachablecollar MLDocument6 pagesDetachablecollar MLmeNo ratings yet
- Dwnload Full Elementary Linear Algebra Applications Version 11th Edition Anton Solutions Manual PDFDocument36 pagesDwnload Full Elementary Linear Algebra Applications Version 11th Edition Anton Solutions Manual PDFja420wwright100% (13)
- Subject Lecturer: Dr. Amani J. Majeed Al-Husseini: SyllabusDocument42 pagesSubject Lecturer: Dr. Amani J. Majeed Al-Husseini: Syllabusياسين رياض بندرNo ratings yet
- Elementary Linear Algebra Applications Version 11th Edition Anton Solutions ManualDocument51 pagesElementary Linear Algebra Applications Version 11th Edition Anton Solutions Manualjeremiahlewiskimadezgyc100% (12)
- Elementary Linear Algebra Applications Version 11th Edition Anton Solutions ManualDocument51 pagesElementary Linear Algebra Applications Version 11th Edition Anton Solutions ManualDanielleDaviscedjo100% (15)
- Ruben Mate 10 06Document12 pagesRuben Mate 10 06ruben.jhunior.2005No ratings yet
- The Nicene-Constantinople Creed in The Syriac Maronite TraditionDocument13 pagesThe Nicene-Constantinople Creed in The Syriac Maronite TraditionJoão DoquaínNo ratings yet
- Practico Metodo Trabajos Virtuales Portico Plano y Portico EspacialDocument2 pagesPractico Metodo Trabajos Virtuales Portico Plano y Portico EspacialClaudiaNo ratings yet
- PYQ Motion in Straight LineDocument5 pagesPYQ Motion in Straight LinesymphonybugNo ratings yet
- Board Questions - ContinuityDocument9 pagesBoard Questions - Continuityadityaaaaaa002No ratings yet
- (TDB) +Vrf+Dvm+s+for+America+2aa Ver+1.9 201214Document94 pages(TDB) +Vrf+Dvm+s+for+America+2aa Ver+1.9 201214Gene Williams Jr.No ratings yet
- TW59ALL2Document1 pageTW59ALL2Travelwise VacationsNo ratings yet
- Formulario Mecánica ClásicaDocument2 pagesFormulario Mecánica ClásicaFer NegreteNo ratings yet
- Detachablecollar LMDocument4 pagesDetachablecollar LMFatima LairecheNo ratings yet
- Largercollarshirt MMDocument14 pagesLargercollarshirt MMLyra HigurashiNo ratings yet
- Formulario de Principales Relaciones Geométricas en EngranesDocument2 pagesFormulario de Principales Relaciones Geométricas en EngranesLuis Eduardo Rodriguez GarrafaNo ratings yet
- Corset LMDocument2 pagesCorset LMCostura PremiumNo ratings yet
- Quot Riyaziyyat Quot Fanni Uzra 4 Cu Sinif Ucun Darslik 2 Ci Hissa 1692857094 823Document84 pagesQuot Riyaziyyat Quot Fanni Uzra 4 Cu Sinif Ucun Darslik 2 Ci Hissa 1692857094 823Ayxan QuluzadəNo ratings yet
- Daewoo Tp-502agDocument39 pagesDaewoo Tp-502agRazvan SasuNo ratings yet
- L22 - PN Homojunction - 5 PDFDocument16 pagesL22 - PN Homojunction - 5 PDFPoddutoori Sankeerth ReddyNo ratings yet
- Dhateng Barabudhur 1Document2 pagesDhateng Barabudhur 1Kebayang MimpiNo ratings yet
- Formulario Mec de MatDocument1 pageFormulario Mec de Matsheamusportero16No ratings yet
- Robotics Lec3Document58 pagesRobotics Lec3aaNo ratings yet
- A Guide to Microsoft Excel 2007 for Scientists and EngineersFrom EverandA Guide to Microsoft Excel 2007 for Scientists and EngineersRating: 5 out of 5 stars5/5 (1)
- Balkan Mathematical Olympiad 20 - Several Authors PDFDocument6 pagesBalkan Mathematical Olympiad 20 - Several Authors PDFLucius Thales da SilvaNo ratings yet
- VectorDocument17 pagesVectorydouneed2012No ratings yet
- Frieze PatternsDocument10 pagesFrieze PatternsSaya BijakNo ratings yet
- Reflection and ShearDocument7 pagesReflection and ShearsamNo ratings yet
- Selfieometry ProjectDocument14 pagesSelfieometry Projectapi-387894196No ratings yet
- Storyboard For GeometryDocument8 pagesStoryboard For GeometryAnthea ClarkeNo ratings yet
- Unit V-Isometric Projection and Perspective ViewDocument15 pagesUnit V-Isometric Projection and Perspective ViewVenkatesh MohanNo ratings yet
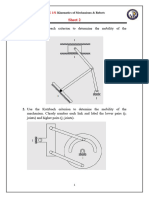
- Sheet 2Document5 pagesSheet 2Mahmoud salahNo ratings yet
- GE-MAT 101 - Mathematics of Patterns and SymmetriesDocument16 pagesGE-MAT 101 - Mathematics of Patterns and SymmetriesRaffy EsquilloNo ratings yet
- Plane Geometry Wo SolidDocument35 pagesPlane Geometry Wo SolidMira AlvarezNo ratings yet
- Materi Corel Draw Powerclip PerspectiveDocument1 pageMateri Corel Draw Powerclip PerspectiveArthur EnglandNo ratings yet
- Areas Related To CirclesDocument17 pagesAreas Related To Circlesshawlin_90No ratings yet
- Volume of A CylinderDocument3 pagesVolume of A CylinderOgwu Charles KanayoNo ratings yet
- Chapter 12 Further TrigonometryDocument34 pagesChapter 12 Further TrigonometryVihanga RuwanmalNo ratings yet
- Topic - Angles: Class - 7 Name The Type of Each of The Following AnglesDocument27 pagesTopic - Angles: Class - 7 Name The Type of Each of The Following Anglesrajdeepghai5607No ratings yet
- Visualising Solid Shapes: Unit 6 Unit 6 Unit 6 Unit 6 Unit 6Document42 pagesVisualising Solid Shapes: Unit 6 Unit 6 Unit 6 Unit 6 Unit 6AjiteshPaddaNo ratings yet
- 826 Question Paper Math1Document6 pages826 Question Paper Math1ASHOK KUMARNo ratings yet
- TD 1 PPT Geometric Constructions 1Document37 pagesTD 1 PPT Geometric Constructions 1Jason BreguilesNo ratings yet
- Grade 6 Quadrilateral inDocument10 pagesGrade 6 Quadrilateral inMridula PriyaNo ratings yet
- Math Tessellation Lesson PlaDocument9 pagesMath Tessellation Lesson Plaapi-254917183No ratings yet
- Pictorial Drawing PowerpointDocument7 pagesPictorial Drawing Powerpointapi-544280724No ratings yet
- TRIGO Formula Sheet - 3 On Properties of TriangleDocument12 pagesTRIGO Formula Sheet - 3 On Properties of TrianglePRITAM KumarNo ratings yet
- Lesson 3Document63 pagesLesson 3JplNo ratings yet
- Pythagoras Game Card PDFDocument5 pagesPythagoras Game Card PDFmdmemaNo ratings yet
- 3 FdabfDocument5 pages3 Fdabfghanesh253No ratings yet
- Questions 1 To 5 Carries 1 Mark Each 1x5 5Document7 pagesQuestions 1 To 5 Carries 1 Mark Each 1x5 5sivanathan mNo ratings yet
- SymmetryDocument43 pagesSymmetryDeepa Kapadia0% (1)
- Plane and Solid Geometry LectureDocument79 pagesPlane and Solid Geometry LectureDy Ann LogeraNo ratings yet
- N 4-5 Area of Regular Polygons Changing DimensionsDocument4 pagesN 4-5 Area of Regular Polygons Changing Dimensionsapi-421370974No ratings yet
- 5 Angle RelationshipsDocument42 pages5 Angle Relationshipsaienne peraltaNo ratings yet