You might also like
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- United Precast ConcreteDocument28 pagesUnited Precast Concretesopnanair100% (1)
- Computer Network Gate MCQ QuesDocument40 pagesComputer Network Gate MCQ QuesAMAN RAJNo ratings yet
- Devotech IDAS-DPX-Civil 3D Help-V9.x.x.xDocument842 pagesDevotech IDAS-DPX-Civil 3D Help-V9.x.x.xmuhammad.civilNo ratings yet
- Theory of Architecture 2Document7 pagesTheory of Architecture 2Kent Acentada CapindoNo ratings yet
- Costruzioni Elettroniche: Mod. KL 800 Linear AmplifierDocument4 pagesCostruzioni Elettroniche: Mod. KL 800 Linear AmplifierPisu Miau Pisu MiauNo ratings yet
- Ard 4 Space RequirementsDocument17 pagesArd 4 Space RequirementsMark Zed Dela Cruz100% (3)
- Italian Fashion History of The 14th and 15th Century PDFDocument37 pagesItalian Fashion History of The 14th and 15th Century PDFAna Maria NegrilăNo ratings yet
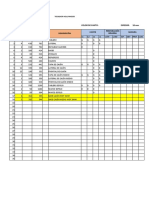
- Nilai KLS Ix.1Document11 pagesNilai KLS Ix.1Muhammad Darajad ArapNo ratings yet
- Nilai KLS Ix.2Document11 pagesNilai KLS Ix.2Muhammad Darajad ArapNo ratings yet
- Given: Required:: SudationDocument2 pagesGiven: Required:: SudationMohamed Imbarek EsekbiNo ratings yet
- Nilai KLS Vii.2Document11 pagesNilai KLS Vii.2Muhammad Darajad ArapNo ratings yet
- Quantitativo de TuboDocument3 pagesQuantitativo de TuboThiago Santos GonçalvesNo ratings yet
- FAELDocument9 pagesFAELshameem aktharNo ratings yet
- Aiven Po-D 24: T:T D DDocument5 pagesAiven Po-D 24: T:T D DTwitter Content You Cannot Miss on YouTubeNo ratings yet
- R922 R976 Multi User EN AI 2017 10Document28 pagesR922 R976 Multi User EN AI 2017 10NGNo ratings yet
- Example of Shear Wall Design To Ec2: June 2020Document33 pagesExample of Shear Wall Design To Ec2: June 2020laijunNo ratings yet
- Taller 10 Nov 20Document134 pagesTaller 10 Nov 20Weimar SánchezNo ratings yet
- Irrigation Engineering Ce-431 L Week 5Document29 pagesIrrigation Engineering Ce-431 L Week 5Irfan zameerNo ratings yet
- SECTION1Document3 pagesSECTION1hkpatel9No ratings yet
- Peb June-July 2023 Examination ResultsDocument3 pagesPeb June-July 2023 Examination Resultstimmie.laurensNo ratings yet
- Factor Method Wind Load - Transversal SectionDocument11 pagesFactor Method Wind Load - Transversal SectionSarah Mae GonzalesNo ratings yet
- Dryer Assy 25000Document2 pagesDryer Assy 25000SHAILESH PATELNo ratings yet
- Despiece SantoriniDocument9 pagesDespiece SantoriniAlexander Ochoa RiosNo ratings yet
- Example of Shear Wall Design To Ec2: June 2020Document33 pagesExample of Shear Wall Design To Ec2: June 2020LSHNo ratings yet
- Electrical Plan-Electrical PlanDocument1 pageElectrical Plan-Electrical PlanwaityholiviaNo ratings yet
- Sports Day 2023 Vajram Tiara-Tiara Titans-1Document1 pageSports Day 2023 Vajram Tiara-Tiara Titans-1SMAZIN AmNo ratings yet
- Costruzioni Elettroniche: Mod. KL 500 Linar AmplifierDocument4 pagesCostruzioni Elettroniche: Mod. KL 500 Linar AmplifierLuis CarlosNo ratings yet
- Design of Footing (Square FTG.) : M Say, L 3.75Document2 pagesDesign of Footing (Square FTG.) : M Say, L 3.75victoriaNo ratings yet
- BBS FormatDocument2 pagesBBS Formatbablurbnm4630No ratings yet
- Microprocessor Û 8086 - IIDocument12 pagesMicroprocessor Û 8086 - IIAvinash Arjun SNo ratings yet
- Design Summary:: Isolated Foundation (F-1) (ACI 318M-95)Document1 pageDesign Summary:: Isolated Foundation (F-1) (ACI 318M-95)taz_taz3No ratings yet
- Icb-Lnta1 Luangnamtha Urban Village Upgrading, Urban Road and DrainageDocument1 pageIcb-Lnta1 Luangnamtha Urban Village Upgrading, Urban Road and DrainagePaphanh FXNo ratings yet
- Soalan Matematik Tahun5 Kertas1sekolah Rendah Ujian MarchDocument6 pagesSoalan Matematik Tahun5 Kertas1sekolah Rendah Ujian Marchkeris_keras95% (22)
- Fisa de Lucru - RJDocument3 pagesFisa de Lucru - RJHuzum NicolasNo ratings yet
- Reading Level Comparison ChartDocument1 pageReading Level Comparison ChartGreg JamesonNo ratings yet
- Matrix Structural AnalysisDocument24 pagesMatrix Structural AnalysisEjay AbanteNo ratings yet
- World MigrationsDocument1 pageWorld MigrationsHugo Enrique Ponce UlloaNo ratings yet
- Example of Shear Wall Design To Ec2: June 2020Document33 pagesExample of Shear Wall Design To Ec2: June 2020royal_eagle04No ratings yet
- Ladder 6/2/2023 Data Name: MAINDocument2 pagesLadder 6/2/2023 Data Name: MAINloi DuongNo ratings yet
- Port-Transhipment Point - Depot Distances Depot - TP Distances (KM) Port - TP Distances (KM)Document1 pagePort-Transhipment Point - Depot Distances Depot - TP Distances (KM) Port - TP Distances (KM)Debasis MohantyNo ratings yet
- Sight PlotDocument25 pagesSight PlotInsan AhammadNo ratings yet
- Modul 1-Paper 1Document11 pagesModul 1-Paper 1pmogana 92No ratings yet
- Quadrilateral - Angles: A) Find The Measure of The Indicated Angle in Each QuadrilateralDocument2 pagesQuadrilateral - Angles: A) Find The Measure of The Indicated Angle in Each QuadrilateralAngel AngiaNo ratings yet
- Cylinder Luffing CalculationDocument2 pagesCylinder Luffing Calculationtechnical engineerNo ratings yet
- 10.0 Base Plate & Anchor BoltDocument16 pages10.0 Base Plate & Anchor Boltkrishna kumar100% (1)
- Finding Interior Angles 1Document2 pagesFinding Interior Angles 1mattNo ratings yet
- Metodo Muto Sentido Secundario Y-YDocument15 pagesMetodo Muto Sentido Secundario Y-YKire Lu SaNo ratings yet
- Human Mtdna Migrations: H, T, U, V, W, X I, J, K A A X A C+DDocument1 pageHuman Mtdna Migrations: H, T, U, V, W, X I, J, K A A X A C+DOzan KorkmazNo ratings yet
- Ficha TecnicaDocument2 pagesFicha TecnicaHector SepulvedaNo ratings yet
- Atlascadastral IV1Document69 pagesAtlascadastral IV1remorcherulNo ratings yet
- MACH2265 Sales Spec Sheet enDocument2 pagesMACH2265 Sales Spec Sheet enLord StovNo ratings yet
- 6 Tonne Power Swivel Keyfeatures ENDocument2 pages6 Tonne Power Swivel Keyfeatures ENNrANo ratings yet
- SergrgsDocument2 pagesSergrgsjudeNo ratings yet
- Inchidere Venituriregistrul-Jurnal: Nr. CRT ADocument19 pagesInchidere Venituriregistrul-Jurnal: Nr. CRT ADelia LupascuNo ratings yet
- Applied Thermodynamics Questions 2Document5 pagesApplied Thermodynamics Questions 2Gunagnya VigneshNo ratings yet
- Cliente: Material Y Color: Color de Canto: Espesor: 18 MM Servicio de Corte Descripción Canto Ranura Perforación BisagraDocument1 pageCliente: Material Y Color: Color de Canto: Espesor: 18 MM Servicio de Corte Descripción Canto Ranura Perforación BisagraEdgardo A. Hdez SalgadoNo ratings yet
- SBMPTN 2014 - Kode 613 - Tkpa - KunciDocument1 pageSBMPTN 2014 - Kode 613 - Tkpa - Kunciyolla putriNo ratings yet
- Design of Column: L.D.College of Engineering ME CASAD 2013-2014Document3 pagesDesign of Column: L.D.College of Engineering ME CASAD 2013-2014vineetkothari1No ratings yet
- Viii. Data Pengamatan 8.1 Uji Organoleptis: W 2 Wo w1 w0Document7 pagesViii. Data Pengamatan 8.1 Uji Organoleptis: W 2 Wo w1 w0Anonymous ukTR8L9LwQNo ratings yet
- Name Work Hours Deliveries A 30 30 B 20 28 C 10 15 D 40 45 E 8 12 F 25 40 G 22 25 H 33 44 I 27 36 J 10 20Document3 pagesName Work Hours Deliveries A 30 30 B 20 28 C 10 15 D 40 45 E 8 12 F 25 40 G 22 25 H 33 44 I 27 36 J 10 20arkadigseoNo ratings yet
- 4.6.-Eaton Rele D5PRDocument2 pages4.6.-Eaton Rele D5PRmartinel noob y baty mozNo ratings yet
- Delta Industrial Articulated Robot SeriesDocument15 pagesDelta Industrial Articulated Robot Seriesrobotech automationNo ratings yet
- Export REACH 20221206 11153115Document2 pagesExport REACH 20221206 11153115robotech automationNo ratings yet
- Export REACH 20221206 11150915Document2 pagesExport REACH 20221206 11150915robotech automationNo ratings yet
- Export REACH 20221206 11154615Document2 pagesExport REACH 20221206 11154615robotech automationNo ratings yet
- Robotech - Company ProfileDocument41 pagesRobotech - Company Profilerobotech automationNo ratings yet
- Reference ArchitectureDocument15 pagesReference Architectureali_saleyNo ratings yet
- ASTM C 222 Standard Specification For Asbestos-Cement Roofing ShinglesDocument3 pagesASTM C 222 Standard Specification For Asbestos-Cement Roofing ShinglesRyan LasacaNo ratings yet
- Docu44573 - VNX Operating Environment For File Release Notes Version 7 1 56 5 PDFDocument68 pagesDocu44573 - VNX Operating Environment For File Release Notes Version 7 1 56 5 PDFNarongNacity NaNo ratings yet
- Avalon Bus Specification: Reference ManualDocument106 pagesAvalon Bus Specification: Reference ManualQuang TrườngNo ratings yet
- Ceragon FibeAir IP-10G Installation GuideDocument71 pagesCeragon FibeAir IP-10G Installation GuidePetyo Georgiev100% (2)
- Recommended Reading: BooksDocument2 pagesRecommended Reading: Booksmau_mmx5738No ratings yet
- Operation and Troubleshooting of Static EquipmentDocument3 pagesOperation and Troubleshooting of Static EquipmentEhab Abowarda100% (1)
- AASHTO - LRFD (Design Example For Steel Girder Superstructure Bridge - 2003)Document698 pagesAASHTO - LRFD (Design Example For Steel Girder Superstructure Bridge - 2003)Ridwan Kris50% (2)
- Effects of Fire On Concrete - AjmDocument5 pagesEffects of Fire On Concrete - AjmAlejandro Rodríguez100% (1)
- RHB INSURANCE Puchong BranchDocument10 pagesRHB INSURANCE Puchong BranchMuthu Raman ChinnaduraiNo ratings yet
- TM MAC (60Hz) 2011 PDFDocument28 pagesTM MAC (60Hz) 2011 PDFgio_flores_4No ratings yet
- Introduction To Renaissance ArchitectureDocument67 pagesIntroduction To Renaissance Architecturenaman sharmaNo ratings yet
- Computer Room - Check ListDocument2 pagesComputer Room - Check ListDemetrios GkikasNo ratings yet
- ArcelorMittal Piling Handbook - Rev08Document368 pagesArcelorMittal Piling Handbook - Rev08suvraNo ratings yet
- NexiaDocument294 pagesNexiaXFBCDBVGFBNNo ratings yet
- Setting Up Django and Your Web Server With UWSGI and Nginx - UWSGI 2Document13 pagesSetting Up Django and Your Web Server With UWSGI and Nginx - UWSGI 2Hillyeh GuirrehNo ratings yet
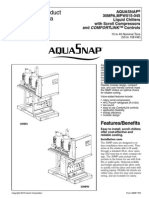
- Product Data 30MPW enDocument28 pagesProduct Data 30MPW enDante Juan Aguilar CastilloNo ratings yet
- Road ConstructionDocument53 pagesRoad ConstructionTinio Joseph100% (1)
- MATH TERMS 4 RefresherDocument2 pagesMATH TERMS 4 Refreshercat buenafeNo ratings yet
- L Train TunnelDocument1 pageL Train TunnelNewsdayNo ratings yet
- Practibox S Practibox S: Available From September 2018 Available From September 2018Document1 pagePractibox S Practibox S: Available From September 2018 Available From September 2018Mohamed Tahar BoussahaNo ratings yet
- Set LGW Mode On ENB (SRv1.2 2-Mar-2018)Document11 pagesSet LGW Mode On ENB (SRv1.2 2-Mar-2018)copey861883No ratings yet
- IR-Inspection Request LogDocument17 pagesIR-Inspection Request Loggsydagcqg euidedegdNo ratings yet
- Boracay HotelsDocument4 pagesBoracay Hotelszotium1863100% (1)