You might also like
- EEE 341/353 Measurements and Instrumentation Lecture NotesDocument30 pagesEEE 341/353 Measurements and Instrumentation Lecture NotesrontojoyNo ratings yet
- MedicalelectricalsafetyDocument89 pagesMedicalelectricalsafetyMeruva LokeshwarNo ratings yet
- Measurement Systems ExplainedDocument17 pagesMeasurement Systems ExplainedAtharva Soni100% (1)
- Biomedical Engineers Safety and Testing ToolsDocument5 pagesBiomedical Engineers Safety and Testing ToolsMohamed A. IsmailNo ratings yet
- Lecture Notes 01Document22 pagesLecture Notes 01Abdul Hakeem Semar KamaluddinNo ratings yet
- Current ClampsDocument32 pagesCurrent ClampsmirmilosNo ratings yet
- Group Assignment # 1 Measurements and Instrumentations Assignment TopicDocument10 pagesGroup Assignment # 1 Measurements and Instrumentations Assignment TopicArsam NasimNo ratings yet
- Measuring Instrument FundamentalsDocument56 pagesMeasuring Instrument Fundamentalskalaivani1408No ratings yet
- Measurement and InstrumentationDocument45 pagesMeasurement and Instrumentationsamkous100% (1)
- EMMI - CH 6 - 13092018 - 031526AMDocument9 pagesEMMI - CH 6 - 13092018 - 031526AMRemix CornerNo ratings yet
- ECG Measurement SystemDocument10 pagesECG Measurement SystemMary HelenNo ratings yet
- ME8501 - Metrology and Measurements - Unit - IDocument30 pagesME8501 - Metrology and Measurements - Unit - Iarunpdc100% (1)
- Therapeutic Equipment PDFDocument5 pagesTherapeutic Equipment PDFPrashant KasarNo ratings yet
- Biopotential ElectrodesDocument35 pagesBiopotential ElectrodesakshayNo ratings yet
- Signal Conditioning Functions and TechniquesDocument33 pagesSignal Conditioning Functions and TechniquesYab TadNo ratings yet
- Due: Monday September 17: Homework 2 - Solution ECE 445 Biomedical Instrumentation, Fall 2012Document3 pagesDue: Monday September 17: Homework 2 - Solution ECE 445 Biomedical Instrumentation, Fall 2012amastasia salsaNo ratings yet
- The OscilloscopeDocument6 pagesThe OscilloscoperiverajluizNo ratings yet
- Biomedical Instrumentation: Chapter 6 in Introduction To Biomedical Equipment Technology by Joseph Carr and John BrownDocument106 pagesBiomedical Instrumentation: Chapter 6 in Introduction To Biomedical Equipment Technology by Joseph Carr and John BrownGauri DNo ratings yet
- Chapter 3 Part 1 Sensor and TransducersDocument48 pagesChapter 3 Part 1 Sensor and TransducersFikadu Eshetu100% (1)
- BMI403.3 Biomedical InstrumentationDocument2 pagesBMI403.3 Biomedical InstrumentationDarpan Specchio PudasainiNo ratings yet
- Clibration Laboratory Layout PDFDocument16 pagesClibration Laboratory Layout PDFjrlr65No ratings yet
- How To Calibrateda Oscilloscope - HTMLDocument8 pagesHow To Calibrateda Oscilloscope - HTMLWahyu DinNo ratings yet
- Instrumentation Theory EEC 126-1Document147 pagesInstrumentation Theory EEC 126-1usman surajNo ratings yet
- Service ManualDocument94 pagesService ManualDirk LindemansNo ratings yet
- On RecordersDocument54 pagesOn RecordersRudra Kumar Mishra100% (1)
- TN 324: Intelligent InstrumentationDocument43 pagesTN 324: Intelligent InstrumentationAlango Jr Tz100% (1)
- Electronics in Biomedical and InstrumentationDocument9 pagesElectronics in Biomedical and InstrumentationchanlalNo ratings yet
- NHHID Calibration BrochureDocument10 pagesNHHID Calibration Brochuregsv988No ratings yet
- Tektronix - Service ManualDocument140 pagesTektronix - Service ManualNathan T Nesbitt100% (1)
- Rigel Medical Electrosurgical Guidance Booklet v1Document32 pagesRigel Medical Electrosurgical Guidance Booklet v1chayefNo ratings yet
- Laboratory Calibration: Met/Cal Met/Track Gold-Plan Training Services Support Upgrades App Notes Newsletter DewkDocument55 pagesLaboratory Calibration: Met/Cal Met/Track Gold-Plan Training Services Support Upgrades App Notes Newsletter DewkTfuzer65770% (1)
- Temperature Sensor Types For Temperature MeasurementDocument8 pagesTemperature Sensor Types For Temperature MeasurementcesarinigillasNo ratings yet
- Transducers PresentationDocument31 pagesTransducers Presentationanur3a31No ratings yet
- Mechanical Measurements and InstrumentationDocument71 pagesMechanical Measurements and InstrumentationanandakumarmtsNo ratings yet
- Resistive TransducerDocument75 pagesResistive TransducerDhineshSKNo ratings yet
- Calibration: Instrumentation and ControlDocument16 pagesCalibration: Instrumentation and ControlTeodoro Jr de JesusNo ratings yet
- TransducersDocument24 pagesTransducersChandra Sekher Reddy BhimiReddyNo ratings yet
- Slyt416 Ecg EegDocument18 pagesSlyt416 Ecg EegsakthyinNo ratings yet
- Vital Signs Monitoring System For Patients.: Universidad Politécnica Salesiana Cuenca - Ecuador AbstractDocument12 pagesVital Signs Monitoring System For Patients.: Universidad Politécnica Salesiana Cuenca - Ecuador AbstractFreddy Valdez GarciaNo ratings yet
- ECG Machine Guide - How It Works, Types, Operation & SafetyDocument36 pagesECG Machine Guide - How It Works, Types, Operation & SafetyAch ThungNo ratings yet
- Unit 54 Electronic Measurement and TestingDocument12 pagesUnit 54 Electronic Measurement and TestingYuvarajaNo ratings yet
- Chapter 02 PDFDocument34 pagesChapter 02 PDFKashan KhanNo ratings yet
- Watt-Hour Meter TestDocument15 pagesWatt-Hour Meter Testsherif ahmed moussaNo ratings yet
- Types of Rectifier Based AC VoltmetersDocument6 pagesTypes of Rectifier Based AC VoltmetersRochelle May CatbaganNo ratings yet
- Ecg 3Document10 pagesEcg 3Khalid KhassawnehNo ratings yet
- Lecture 2 Sensors and TransducersDocument47 pagesLecture 2 Sensors and TransducersdevchithNo ratings yet
- Op Actas BTT EngDocument31 pagesOp Actas BTT EngElverCastilloDamianNo ratings yet
- FDP Recent Trends in Mechatronics & Automation Brochure 23.06.20Document2 pagesFDP Recent Trends in Mechatronics & Automation Brochure 23.06.20M. Sadiq. A. PachapuriNo ratings yet
- Recording ProblemsDocument13 pagesRecording ProblemsAleesha100% (1)
- FKE S3 1011 BUKU LOG Amalan KejuruteraanDocument80 pagesFKE S3 1011 BUKU LOG Amalan Kejuruteraanng soo keeNo ratings yet
- Solenoids and RelaysDocument15 pagesSolenoids and RelaysJayloyd LaraNo ratings yet
- Introduction To Labview and Temperature MeasurementDocument10 pagesIntroduction To Labview and Temperature MeasurementAlyssa Gwynne Casio OrqueNo ratings yet
- HKD GDocument2 pagesHKD GSaluka KulathungaNo ratings yet
- Thermocouples: Prepared By: K Krishna Kishore 4 Year ECE 15F41A0440 Presented To: Mr. S. Nanda Kishore (PH.D.)Document17 pagesThermocouples: Prepared By: K Krishna Kishore 4 Year ECE 15F41A0440 Presented To: Mr. S. Nanda Kishore (PH.D.)k kNo ratings yet
- 1-Wire Digital Thermometer DS18S20Document23 pages1-Wire Digital Thermometer DS18S20ErnestoNo ratings yet
- Measurements Instrumintations 1Document12 pagesMeasurements Instrumintations 1Saeed Bajawi100% (1)
- Module 1 Part 1 MergedDocument146 pagesModule 1 Part 1 MergedSankaranarayanan ANo ratings yet
- EE305 Lecture 2 Instrument TypesDocument22 pagesEE305 Lecture 2 Instrument TypesFrank WhiteNo ratings yet
- Enrollment No. Quiz-1 (10) Quiz-2Document3 pagesEnrollment No. Quiz-1 (10) Quiz-2vishnuNo ratings yet
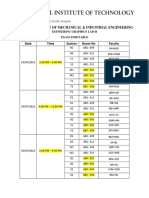
- Engineering Graphics Lab-II Exam TimetableDocument2 pagesEngineering Graphics Lab-II Exam TimetablevishnuNo ratings yet
- Chapter - 1: Diodes and ApplicationsDocument5 pagesChapter - 1: Diodes and ApplicationsvishnuNo ratings yet
- MIT Sports BrochureDocument18 pagesMIT Sports BrochurevishnuNo ratings yet
- 2018 Syllabus: B. Tech. in MECHATRONICS ENGINEERING Third Semester Fourth SemesterDocument69 pages2018 Syllabus: B. Tech. in MECHATRONICS ENGINEERING Third Semester Fourth SemesterVarada RajNo ratings yet
- UntitledDocument6 pagesUntitledvishnuNo ratings yet
- 2 - Algorithmic AnalysisDocument36 pages2 - Algorithmic AnalysisvishnuNo ratings yet
- Battery Technology GuideDocument44 pagesBattery Technology Guidevishnu100% (1)
- Solve BVPs in ODEsDocument52 pagesSolve BVPs in ODEsvishnuNo ratings yet
- Biology Combined NotesDocument166 pagesBiology Combined Notessanjana bishtNo ratings yet
- 6 - Arrays and Linked ListsDocument21 pages6 - Arrays and Linked ListsvishnuNo ratings yet
- 5 - Heaps - Binary - and - Avl TreesDocument29 pages5 - Heaps - Binary - and - Avl TreesvishnuNo ratings yet
- 1 - Introduction To DsaDocument28 pages1 - Introduction To DsavishnuNo ratings yet
- 4 - Linear Data Structures - QueuesDocument13 pages4 - Linear Data Structures - QueuesvishnuNo ratings yet
- Reviewer IndusDocument3 pagesReviewer IndusBajogs RamosNo ratings yet
- Bs 7671 2018 Corrigendum Dec 2018 PDFDocument11 pagesBs 7671 2018 Corrigendum Dec 2018 PDFSimon Rae100% (2)
- ConclusionDocument14 pagesConclusionRajat JainNo ratings yet
- ESS+Intermec+PF8T NewDocument17 pagesESS+Intermec+PF8T NewmtlpcguysNo ratings yet
- CO2 and Temperature Transmitter User's GuideDocument4 pagesCO2 and Temperature Transmitter User's GuideAFNo ratings yet
- Lesson Plan 7 Electrical Installation and Maintenance I. ObjectivesDocument7 pagesLesson Plan 7 Electrical Installation and Maintenance I. Objectivescecille mañacapNo ratings yet
- Instruction Manual: SMC4-4-16A16BDocument29 pagesInstruction Manual: SMC4-4-16A16BrodNo ratings yet
- Getting Started With Android DevelopmentDocument90 pagesGetting Started With Android DevelopmentAnubhav Kumar100% (1)
- EEE 133 1s2021 Problem Set 2Document3 pagesEEE 133 1s2021 Problem Set 2Roland Paul PrincipeNo ratings yet
- DC Surge Protection Solutions: Data SheetDocument2 pagesDC Surge Protection Solutions: Data SheetNick ButcherNo ratings yet
- Aoc 712si TPVWH LCD Monitor Service Manual PDFDocument58 pagesAoc 712si TPVWH LCD Monitor Service Manual PDFCristianBaezNo ratings yet
- R 1000iA130F Flyer EN PDFDocument2 pagesR 1000iA130F Flyer EN PDFshray sabooNo ratings yet
- EUROPEAN INTEGRATED RAILWAY RADIO ENHANCED NETWORK SPECIFICATIONDocument138 pagesEUROPEAN INTEGRATED RAILWAY RADIO ENHANCED NETWORK SPECIFICATIONsaospieNo ratings yet
- Avid EZ Cal IR Analog Positioner PDFDocument4 pagesAvid EZ Cal IR Analog Positioner PDFisctomaslopezNo ratings yet
- Electrician Domestic Solution CurriculumDocument30 pagesElectrician Domestic Solution CurriculumnassarkiNo ratings yet
- CV Novian Patria Uman ITS EnglishDocument1 pageCV Novian Patria Uman ITS EnglishNovian Patria Uman PutraNo ratings yet
- Chapter 6 DeadlocksDocument13 pagesChapter 6 DeadlocksbagrechaamitNo ratings yet
- 520l0344 (Danfoss PVG32)Document80 pages520l0344 (Danfoss PVG32)Purnomo Anton100% (2)
- Nokia 701 Rm-774 Service Schematics v1.0Document13 pagesNokia 701 Rm-774 Service Schematics v1.0sajjadfattahNo ratings yet
- Thermostat W3230: Function Description of W3230Document4 pagesThermostat W3230: Function Description of W3230p_venture100% (1)
- EN 61000 3-2 GuideDocument19 pagesEN 61000 3-2 Guideyunus emre KılınçNo ratings yet
- What Is MetastabilityDocument5 pagesWhat Is Metastabilityaarthi100No ratings yet
- URC-7552 RelojDocument40 pagesURC-7552 RelojRoderick Lenhardt FontanNo ratings yet
- Honeywell-Sensing-Kgz10 Series Oxygen SensorsDocument4 pagesHoneywell-Sensing-Kgz10 Series Oxygen SensorstpchoNo ratings yet
- Operation Manual: H100 Series High Performance Vector Control InverterDocument111 pagesOperation Manual: H100 Series High Performance Vector Control Inverternaudi20No ratings yet
- Mapúa University - Intramuros Last Name: First Name: Middle Name: Student NoDocument5 pagesMapúa University - Intramuros Last Name: First Name: Middle Name: Student NoAldrin SimaraNo ratings yet
- 3-Pole Contactors (40 - 60hp @ 575V) Selection GuideDocument1 page3-Pole Contactors (40 - 60hp @ 575V) Selection GuideGerman J'IngNo ratings yet
- Osisense XX Xx518a3pam12Document6 pagesOsisense XX Xx518a3pam12Paulinho CezarNo ratings yet
- Ieee Nems 2010 Accepted PapersDocument24 pagesIeee Nems 2010 Accepted PapersvieffejonesNo ratings yet
- EIGHT Electronic Games AdCal Instructions Nov21 - 230925 - 190245Document28 pagesEIGHT Electronic Games AdCal Instructions Nov21 - 230925 - 190245Curtis SawyerNo ratings yet