You might also like
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Mechanical ScienceDocument8 pagesMechanical ScienceAbhishek Mitra100% (2)
- All Aluminium Conductors (Aac) : As Per Astm B231-78Document2 pagesAll Aluminium Conductors (Aac) : As Per Astm B231-78rahulNo ratings yet
- SOM 2 MarksDocument8 pagesSOM 2 MarksSiva ShanmugamNo ratings yet
- Snap Fit DesignDocument4 pagesSnap Fit DesignAlex DobrescuNo ratings yet
- Fault Analysis - 2019-02-23 (DOE) 2 SlidesDocument120 pagesFault Analysis - 2019-02-23 (DOE) 2 SlidesCatrina Federico100% (1)
- Friction From Meriam PDFDocument62 pagesFriction From Meriam PDFsimalaravi50% (2)
- Remote Field TestingDocument11 pagesRemote Field TestingvibinkumarsNo ratings yet
- Hertzian ContactDocument5 pagesHertzian ContactGanesh R NavadNo ratings yet
- Contact Mechanics and Its ModelsDocument17 pagesContact Mechanics and Its ModelsNirmalya MishraNo ratings yet
- Commissioning Tests For HV Underground Cables (Up To 33Kv) SWPDocument13 pagesCommissioning Tests For HV Underground Cables (Up To 33Kv) SWPCharles Robiansyah100% (1)
- cs237b Lecture 7Document16 pagescs237b Lecture 7movicNo ratings yet
- SNUx Chapter 3 PDFDocument22 pagesSNUx Chapter 3 PDFMuhammad IrfanNo ratings yet
- Robotic Grasping and Contact: A Review: Ien - ODocument6 pagesRobotic Grasping and Contact: A Review: Ien - OzezinhoNo ratings yet
- Force Closure GraspDocument5 pagesForce Closure GraspSuman KumarNo ratings yet
- Robot Grasping Foundations: Definition 2.1 A Grasp Is Commonly Defined As A Set of Contacts On The Surface ofDocument18 pagesRobot Grasping Foundations: Definition 2.1 A Grasp Is Commonly Defined As A Set of Contacts On The Surface ofsandhyaNo ratings yet
- CONTA178 Element Full ClarificationDocument48 pagesCONTA178 Element Full Clarificationpravin surveNo ratings yet
- The Instantaneous Kinematics of ManipulationDocument6 pagesThe Instantaneous Kinematics of ManipulationsandhyaNo ratings yet
- A Review Article: Investigations On Soft Materials For Soft Robot ManipulationsDocument11 pagesA Review Article: Investigations On Soft Materials For Soft Robot ManipulationsShubham GhoshNo ratings yet
- Gregory P. Starr: Computers & Elect. Engng Vol. 16, No. 1, Pp. 23-34, 1990Document12 pagesGregory P. Starr: Computers & Elect. Engng Vol. 16, No. 1, Pp. 23-34, 1990Alioune Badara DioufNo ratings yet
- Contact Stiffness and Damping Estimation For Robotic SystemsDocument17 pagesContact Stiffness and Damping Estimation For Robotic SystemsNguyễn Anh SơnNo ratings yet
- Dynamic Manipulation of An Unknown Object Under Compliant Non-Holonomic ConstraintsDocument11 pagesDynamic Manipulation of An Unknown Object Under Compliant Non-Holonomic Constraintschristian050294No ratings yet
- Part2 Emotion2Document37 pagesPart2 Emotion2hohoNo ratings yet
- Flac InterfaceDocument34 pagesFlac InterfaceLuca Brandi100% (1)
- Contatto in ANSYSDocument20 pagesContatto in ANSYSmatteo.daccNo ratings yet
- 5 Interfaces: 5.1 General CommentsDocument36 pages5 Interfaces: 5.1 General CommentsGuido AndreottiNo ratings yet
- Drou Kas 2015Document18 pagesDrou Kas 2015lamngoctam89No ratings yet
- 0045 7825 (91) 90022 X PDFDocument23 pages0045 7825 (91) 90022 X PDFMichael ZhaoNo ratings yet
- 3 Interfaces: 3.1 General CommentsDocument36 pages3 Interfaces: 3.1 General CommentsQuangNguyenVanNo ratings yet
- Lit VM Ijnme01Document34 pagesLit VM Ijnme01Andrés MercadoNo ratings yet
- 2004 ICS MurakamiDocument4 pages2004 ICS MurakamiAmirul IzzatNo ratings yet
- InterfaceDocument10 pagesInterfaceEA YohannesNo ratings yet
- FrictionDocument2 pagesFrictionAravind BanothNo ratings yet
- Att - Frict - Capstan EquationDocument16 pagesAtt - Frict - Capstan Equationarrtfiend2131No ratings yet
- 11.5.5 Articulating Fingers: 11.6 Grasping Modes, Forces, and StabilityDocument3 pages11.5.5 Articulating Fingers: 11.6 Grasping Modes, Forces, and StabilityMako TyrellNo ratings yet
- Geometric In-Hand Regrasp Planning: Alternating Optimization of Finger Gaits and In-Grasp ManipulationDocument8 pagesGeometric In-Hand Regrasp Planning: Alternating Optimization of Finger Gaits and In-Grasp ManipulationAlioune Badara DioufNo ratings yet
- DEM Calibration Approach Implementing Contact ModeDocument7 pagesDEM Calibration Approach Implementing Contact ModeSaraNo ratings yet
- RobotDocument11 pagesRobotreast21No ratings yet
- A Review of Dynamic Balancing For Robotic Mechanisms: Bin Wei and Dan ZhangDocument17 pagesA Review of Dynamic Balancing For Robotic Mechanisms: Bin Wei and Dan ZhangEsteban GutiérrezNo ratings yet
- Enabling Multi-Finger, Multi-Hand Virtualized Grasping: Submitted To 2003 IEEE ICRADocument7 pagesEnabling Multi-Finger, Multi-Hand Virtualized Grasping: Submitted To 2003 IEEE ICRAIvan AvramovNo ratings yet
- Viva Questions in AnsysDocument5 pagesViva Questions in AnsyssharathNo ratings yet
- Micro-Mechanical Model of A Hyper-Elastic Open-Cell Foam: P. Hård Af Segerstad & S. TollDocument5 pagesMicro-Mechanical Model of A Hyper-Elastic Open-Cell Foam: P. Hård Af Segerstad & S. TollUmed Abd-alsatarNo ratings yet
- The Reality of Virtual Environments: Jean-Christian DelannoyDocument3 pagesThe Reality of Virtual Environments: Jean-Christian DelannoyHany ElGezawyNo ratings yet
- 2.1 A Preview of CalculusDocument1 page2.1 A Preview of CalculusShane BuragaNo ratings yet
- 12.3.5.7. Detecting Collisions Between Moving BodiesDocument5 pages12.3.5.7. Detecting Collisions Between Moving BodiesmasterhacksNo ratings yet
- Implementation of The Contensou-Erismann Model ofDocument12 pagesImplementation of The Contensou-Erismann Model ofJarek PlaszczycaNo ratings yet
- Forward Kinematics: The Denavit-Hartenberg Convention: 3.1 Kinematic ChainsDocument19 pagesForward Kinematics: The Denavit-Hartenberg Convention: 3.1 Kinematic ChainsKispandu GuptaNo ratings yet
- Inverse Kinematics Positioning Using Nonlinear Programming For Highly Articulated FiguresDocument30 pagesInverse Kinematics Positioning Using Nonlinear Programming For Highly Articulated FiguresbobohelpNo ratings yet
- Strain Measurement by Using Strain GaugeDocument13 pagesStrain Measurement by Using Strain GaugeBihari MathurNo ratings yet
- A ComparisionDocument19 pagesA ComparisionThaiHuynhNgocNo ratings yet
- 5 - Mech - BNL - 14.0 - L03-ContactDocument39 pages5 - Mech - BNL - 14.0 - L03-Contactandreazevedo.caNo ratings yet
- Fea 2MDocument13 pagesFea 2MSubharanjani MathiNo ratings yet
- Colloids AND Surfaces: Abraham MarmurDocument8 pagesColloids AND Surfaces: Abraham MarmurDžana KadrićNo ratings yet
- Modeling of Contact Interfaces in Built-Up Structures by Zero-Thickness ElementsDocument9 pagesModeling of Contact Interfaces in Built-Up Structures by Zero-Thickness ElementsBergheisenNo ratings yet
- TorsionDocument14 pagesTorsionProninaNo ratings yet
- Shear and TorsionDocument15 pagesShear and TorsionNadia AzmiNo ratings yet
- Term Paper Maths: Name: Kamaldeep Singh Course: B-Tech (Hons) M.E. Roll No.: A14 Section: A4005 REG. ID: 11011377Document24 pagesTerm Paper Maths: Name: Kamaldeep Singh Course: B-Tech (Hons) M.E. Roll No.: A14 Section: A4005 REG. ID: 11011377Kamaldeep SinghNo ratings yet
- Compendium 3Document5 pagesCompendium 3m.jovanoskaNo ratings yet
- Torsion TestDocument7 pagesTorsion Testilya danisyahNo ratings yet
- On The Compression of A CylinderDocument67 pagesOn The Compression of A CylinderfrankNo ratings yet
- Non-Smooth Deterministic or Stochastic Discrete Dynamical Systems: Applications to Models with Friction or ImpactFrom EverandNon-Smooth Deterministic or Stochastic Discrete Dynamical Systems: Applications to Models with Friction or ImpactNo ratings yet
- Method of Dimensionality Reduction in Contact Mechanics and FrictionFrom EverandMethod of Dimensionality Reduction in Contact Mechanics and FrictionNo ratings yet
- Motion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledFrom EverandMotion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledNo ratings yet
- Lecture 15Document8 pagesLecture 15movicNo ratings yet
- Lecture 3Document13 pagesLecture 3movicNo ratings yet
- Lecture 14Document5 pagesLecture 14movicNo ratings yet
- Lecture 1Document9 pagesLecture 1movicNo ratings yet
- Lecture 2Document10 pagesLecture 2movicNo ratings yet
- cs237b Lecture 6Document7 pagescs237b Lecture 6movicNo ratings yet
- cs237b Lecture 12Document14 pagescs237b Lecture 12movicNo ratings yet
- cs237b Lecture 3Document10 pagescs237b Lecture 3movicNo ratings yet
- Linearized Supersonic Flow: Lecture Notes Presented by C.R. PrajapatiDocument14 pagesLinearized Supersonic Flow: Lecture Notes Presented by C.R. PrajapatiChetan PrajapatiNo ratings yet
- Chapter 10 BookletDocument28 pagesChapter 10 BookletMIhaela CorcheNo ratings yet
- NGR PDFDocument5 pagesNGR PDFusmanNo ratings yet
- Dossier BATERIES enDocument14 pagesDossier BATERIES enNacer Mezghiche100% (1)
- TVF2 5Document107 pagesTVF2 5Ravinder KumarNo ratings yet
- Submittal Rev 2Document264 pagesSubmittal Rev 2Haythamberg AhmedNo ratings yet
- 1st Assess 2nd Term 2023 Y9Document10 pages1st Assess 2nd Term 2023 Y9Ahsan AhmedNo ratings yet
- Alpha 400 Handbook: Part Number 17128Document4 pagesAlpha 400 Handbook: Part Number 17128FungkkdiNo ratings yet
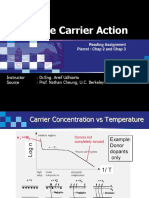
- Mobile Carrier Action: Instructor: DR - Eng. Arief Udhiarto Source: Prof. Nathan Cheung, U.C. BerkeleyDocument23 pagesMobile Carrier Action: Instructor: DR - Eng. Arief Udhiarto Source: Prof. Nathan Cheung, U.C. BerkeleyMess YeahNo ratings yet
- 83837d 1 PDFDocument183 pages83837d 1 PDFKhedr HamoudNo ratings yet
- Fiitjee: JEE (Advanced), 2015Document24 pagesFiitjee: JEE (Advanced), 2015Sayan Kumar KhanNo ratings yet
- COPO Mapping 18-19Document18 pagesCOPO Mapping 18-19Satej KelkarNo ratings yet
- Farzad Hejazi and Tan Kar Chun - Advanced Solid Mechanics - Simplified Theory-CRC Press (2021)Document131 pagesFarzad Hejazi and Tan Kar Chun - Advanced Solid Mechanics - Simplified Theory-CRC Press (2021)Ngoc Thang NguyenNo ratings yet
- Introduction EM Waves WorksheetDocument3 pagesIntroduction EM Waves WorksheetUmer AbdullahNo ratings yet
- Chapter 3 Large Sclae ClassDocument59 pagesChapter 3 Large Sclae ClassAnonymous H6bzpSwYtNo ratings yet
- Dyna ProjectDocument58 pagesDyna ProjectCarlo Domanais0% (3)
- Lab Report: Phys-381 - Experiments in Modern PhysicsDocument16 pagesLab Report: Phys-381 - Experiments in Modern PhysicsMohammed Jahanzeb ChoudaryNo ratings yet
- Equivalent Circuit Model Analysis ExampleDocument4 pagesEquivalent Circuit Model Analysis ExampleGiray SenerginNo ratings yet
- A Contact Less Electrical Energy Transmission SystemDocument8 pagesA Contact Less Electrical Energy Transmission SystemΛυσίμαχος ΜαρτάκηςNo ratings yet
- 1 BTS640S2Document16 pages1 BTS640S2wtn2013No ratings yet
- 2.4 MOMENTUM-IMPULSe PDFDocument71 pages2.4 MOMENTUM-IMPULSe PDFsanad boshehNo ratings yet
- Electrical Power T&D System: Module Iii - SubstationDocument60 pagesElectrical Power T&D System: Module Iii - SubstationYusup SuryadiNo ratings yet
- Ugrd-Nsci6100-2016s Calculus-Based Physics 1 Midterm q2Document13 pagesUgrd-Nsci6100-2016s Calculus-Based Physics 1 Midterm q2Leo Jade AbiertasNo ratings yet
- CH3 TransformerDocument57 pagesCH3 TransformerDoktor CintaNo ratings yet
- Lift and Escalator Motor Sizing With Calculations and ExamplesDocument22 pagesLift and Escalator Motor Sizing With Calculations and ExamplesjayakumarNo ratings yet
- Autonics Md5 Cat Eng 130808Document15 pagesAutonics Md5 Cat Eng 130808chandru005No ratings yet