0% found this document useful (0 votes)
537 views9 pagesDC Motor Chopper Homework Solutions
1) The document provides details of a chopper-controlled DC motor, including its rated torque, speed, and efficiency. It gives equations to calculate the motor's average torque, current, and duty cycle versus speed characteristics.
2) It asks the reader to calculate the torque-speed characteristics for a given DC motor at a duty cycle of 0.4, and asks if the averaging and instantaneous methods compare well in discontinuous conduction mode.
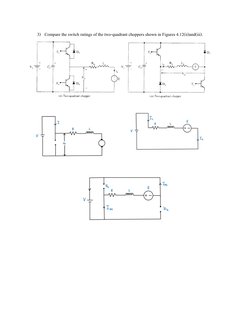
3) It asks to compare the switch ratings of two different chopper circuits shown in figures 4.12(ii) and 4.12(iii).
Uploaded by
nxey bonxCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
537 views9 pagesDC Motor Chopper Homework Solutions
1) The document provides details of a chopper-controlled DC motor, including its rated torque, speed, and efficiency. It gives equations to calculate the motor's average torque, current, and duty cycle versus speed characteristics.
2) It asks the reader to calculate the torque-speed characteristics for a given DC motor at a duty cycle of 0.4, and asks if the averaging and instantaneous methods compare well in discontinuous conduction mode.
3) It asks to compare the switch ratings of two different chopper circuits shown in figures 4.12(ii) and 4.12(iii).
Uploaded by
nxey bonxCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd