You might also like
- LTE SIB and Layer3 Messages in DetailDocument77 pagesLTE SIB and Layer3 Messages in DetailKhalid Waleed Khaleel0% (1)
- Chapter I Lin Sys II Part IIDocument22 pagesChapter I Lin Sys II Part IIMohamed Ouail CHARAOUINo ratings yet
- ECE212-ESA-Lecture4 - Part1 - ConvolutionDocument13 pagesECE212-ESA-Lecture4 - Part1 - Convolutionahmed osama elsayed ahmedNo ratings yet
- Difference and Differential Equations and Their Solutions: - ObjectivesDocument11 pagesDifference and Differential Equations and Their Solutions: - ObjectivesGkkNo ratings yet
- Difference and Differential Equations and Their Solutions: - ObjectivesDocument11 pagesDifference and Differential Equations and Their Solutions: - ObjectivesjklkNo ratings yet
- Z TransformDocument23 pagesZ TransformHina ShakirNo ratings yet
- Lecture 04Document8 pagesLecture 04Sabih HaiderNo ratings yet
- Lecture 4Document58 pagesLecture 4Ali QureshiNo ratings yet
- S&S - Week 5Document38 pagesS&S - Week 5machasong98No ratings yet
- Course Outline: TEL252E Signals and Systems Chapter 2Document26 pagesCourse Outline: TEL252E Signals and Systems Chapter 2Muhammet ÖzdemirNo ratings yet
- CSE - 610 Lecture # 2Document46 pagesCSE - 610 Lecture # 2zaidNo ratings yet
- Analysis of Discrete-Time Linear Time-Invariant SystemsDocument41 pagesAnalysis of Discrete-Time Linear Time-Invariant SystemsVAN STEVEN SANTOSNo ratings yet
- H (N) X (N) B N X) : - BIBO Stability Condition - ProofDocument10 pagesH (N) X (N) B N X) : - BIBO Stability Condition - ProofPasanNo ratings yet
- 1 3Document59 pages1 3Anteneh AtumoNo ratings yet
- LTI System Properties Example: Yn XNDocument2 pagesLTI System Properties Example: Yn XNShahbazHussainNo ratings yet
- DSP Lecture on Convolution, Stability and FIR-IIR SystemsDocument20 pagesDSP Lecture on Convolution, Stability and FIR-IIR SystemszaidNo ratings yet
- In Summary ContinuousDocument55 pagesIn Summary ContinuousFatmir KelmendiNo ratings yet
- Why DSP is ImportantDocument54 pagesWhy DSP is Importantshivam vashistNo ratings yet
- Ch2 (3) Handouts 3e PDFDocument10 pagesCh2 (3) Handouts 3e PDFAnonymous eiYUGFJZ3iNo ratings yet
- EEO 401 Note Set 4Document8 pagesEEO 401 Note Set 4The great PNo ratings yet
- 6 Stability of Discrete-Time Systems - CompleteDocument40 pages6 Stability of Discrete-Time Systems - CompleteIvan IndirsyahNo ratings yet
- EE330 DSP: Discrete Time Signals and SystemsDocument43 pagesEE330 DSP: Discrete Time Signals and SystemsRakhmeen gulNo ratings yet
- Discrete Time Signals&systemsDocument24 pagesDiscrete Time Signals&systemsRogers Rodri ShayoNo ratings yet
- Lect 4-5 ConvolutionDocument18 pagesLect 4-5 ConvolutionekmemonNo ratings yet
- ProblemSheet - Chapter 3Document5 pagesProblemSheet - Chapter 3Bhen CalugayNo ratings yet
- Lec-6 Digital Signal ProcessDocument14 pagesLec-6 Digital Signal ProcessSaif AlabdullahNo ratings yet
- Class 6 NotesaDocument3 pagesClass 6 Notesahakkem bNo ratings yet
- Convolution of Discrete-Time Signals: - ObjectivesDocument14 pagesConvolution of Discrete-Time Signals: - ObjectivesMylavarapu SriprithamNo ratings yet
- Convolution of Discrete-Time Signals: - ObjectivesDocument14 pagesConvolution of Discrete-Time Signals: - ObjectivesDeepak KumarNo ratings yet
- Chapter 2 - Discrete Time Signals and SystemsDocument81 pagesChapter 2 - Discrete Time Signals and Systemsdvishwakarma1796No ratings yet
- Chapter 02Document33 pagesChapter 02Taiyeb Hasan SakibNo ratings yet
- 07 Fenton SimulationDocument52 pages07 Fenton SimulationAndres Pino100% (2)
- Representation of Discrete-Time SystemsDocument17 pagesRepresentation of Discrete-Time SystemsSabu GeorgeNo ratings yet
- Chapter 3 Difference EquationDocument33 pagesChapter 3 Difference EquationMaga LakshmiNo ratings yet
- EEE4221 DSP Lecture 4Document25 pagesEEE4221 DSP Lecture 4David KanikiNo ratings yet
- Signals-Discrete TimeDocument21 pagesSignals-Discrete TimeMohamed Ouail CHARAOUINo ratings yet
- LAB 2: Discrete Time Signals & Linear System ObjectivesDocument12 pagesLAB 2: Discrete Time Signals & Linear System Objectivesmjrahimi.eee2020No ratings yet
- 2 Singularity FunctionDocument28 pages2 Singularity FunctionsdfssdfNo ratings yet
- Binomial Coefficient FormulasDocument29 pagesBinomial Coefficient FormulasDonna HernandezNo ratings yet
- Pengolahan Sinyal Digital: Adhi Harmoko SaputroDocument34 pagesPengolahan Sinyal Digital: Adhi Harmoko SaputroKevin AkmalansyahNo ratings yet
- Intro to Algorithms & Data Structures LectureDocument30 pagesIntro to Algorithms & Data Structures LectureSaqib SherNo ratings yet
- Digital Signal Processing I Class Notes 2020-2021Document4 pagesDigital Signal Processing I Class Notes 2020-2021SahdanNo ratings yet
- INSTITUTE OF AERONAUTICAL ENGINEERING COLLEGE DIGTAL SIGNAL PROCESSINGDocument15 pagesINSTITUTE OF AERONAUTICAL ENGINEERING COLLEGE DIGTAL SIGNAL PROCESSINGBairam Ravi KumarNo ratings yet
- Numerical Methods For Differential Equations: Chapter 2: Runge-Kutta and Linear Multistep MethodsDocument68 pagesNumerical Methods For Differential Equations: Chapter 2: Runge-Kutta and Linear Multistep MethodsAjeeshAzeezNo ratings yet
- Oscillatory Motion ExplainedDocument117 pagesOscillatory Motion ExplainedsoricutyaNo ratings yet
- EMT488/3 Digital Signal Processing Convolution and LTI SystemsDocument23 pagesEMT488/3 Digital Signal Processing Convolution and LTI SystemsdemononesNo ratings yet
- Lec-7 Digital Signal ProcessDocument19 pagesLec-7 Digital Signal ProcessSaif AlabdullahNo ratings yet
- Digital Signal Processing: Cross-Correlation and Auto-Correlation FunctionsDocument16 pagesDigital Signal Processing: Cross-Correlation and Auto-Correlation FunctionsekmemonNo ratings yet
- PcaDocument73 pagesPca1balamanianNo ratings yet
- Lec2-Signal and SystemDocument36 pagesLec2-Signal and SystemIrum Nausheen Lecturer - FETNo ratings yet
- Topic5 Linear TransformationsDocument25 pagesTopic5 Linear TransformationsFilipus Boby Setiawan BudimanNo ratings yet
- lecture34_week34Document29 pageslecture34_week34RabiaNo ratings yet
- dsp10 3Document20 pagesdsp10 3tawfigsaeed640No ratings yet
- Discrete - Time Systems Discrete - Time Systems: ExamplesDocument17 pagesDiscrete - Time Systems Discrete - Time Systems: Exampleshakkem bNo ratings yet
- DSP Tutorial Convolution and SystemsDocument14 pagesDSP Tutorial Convolution and SystemsARUOS SouraNo ratings yet
- Shape Analysis Moment Invariants: Guido Gerig CS 7960, Spring 2010Document38 pagesShape Analysis Moment Invariants: Guido Gerig CS 7960, Spring 2010jose mercadoNo ratings yet
- Final Review 2024Document16 pagesFinal Review 2024lxbloc.iugc.comsNo ratings yet
- Discrete - Time Systems Discrete - Time Systems: ExamplesDocument17 pagesDiscrete - Time Systems Discrete - Time Systems: ExamplesSandhya SandyNo ratings yet
- Digital Signal Processing Lecture+5,+January+20thDocument36 pagesDigital Signal Processing Lecture+5,+January+20thGASR2017No ratings yet
- Digital Control Systems: Introduction & Z-TransformDocument70 pagesDigital Control Systems: Introduction & Z-TransformZeeshan RafiqNo ratings yet
- Signals-Discrete TimeDocument21 pagesSignals-Discrete TimeMohamed Ouail CHARAOUINo ratings yet
- Principles of Communication 3Document63 pagesPrinciples of Communication 3Mohamed Ouail CHARAOUINo ratings yet
- CamScanner document scansDocument37 pagesCamScanner document scansMohamed Ouail CHARAOUINo ratings yet
- 3 - Z80 Intsruction Set and Programming TechniquesDocument8 pages3 - Z80 Intsruction Set and Programming TechniquesMohamed Ouail CHARAOUINo ratings yet
- Ee321 Chap01 ReviewDocument60 pagesEe321 Chap01 ReviewMohamed Ouail CHARAOUINo ratings yet
- EE331-Chapter5-Part1 DC To DC Converter Step Down ChopperDocument12 pagesEE331-Chapter5-Part1 DC To DC Converter Step Down ChopperMohamed Ouail CHARAOUINo ratings yet
- EE331 ChapterI PartIDocument4 pagesEE331 ChapterI PartIMohamed Ouail CHARAOUINo ratings yet
- Autonomous Vehicle Highway Navigation Using Reinforcement LearningDocument38 pagesAutonomous Vehicle Highway Navigation Using Reinforcement LearningMohamed Ouail CHARAOUINo ratings yet
- Fast GUI Creator For Embedded Systems - MadaouiDocument60 pagesFast GUI Creator For Embedded Systems - MadaouiMohamed Ouail CHARAOUINo ratings yet
- EE331 Harmonics AnalysisDocument5 pagesEE331 Harmonics AnalysisMohamed Ouail CHARAOUINo ratings yet
- Fin Irjmets1651040581Document5 pagesFin Irjmets1651040581Mohamed Ouail CHARAOUINo ratings yet
- Automation of Network Analysis Techniques Based On Graph Theory - AissaDocument40 pagesAutomation of Network Analysis Techniques Based On Graph Theory - AissaMohamed Ouail CHARAOUINo ratings yet
- Study of Advanced VHDL FeaturesDocument46 pagesStudy of Advanced VHDL FeaturesMohamed Ouail CHARAOUINo ratings yet
- Lab 3Document29 pagesLab 3EngrAbdulQaderNo ratings yet
- Digital Communication Systems by Simon Haykin-124Document6 pagesDigital Communication Systems by Simon Haykin-124matildaNo ratings yet
- Information: Surpass Hit 7035 Extension Shelf 4.0 Technical ManualDocument49 pagesInformation: Surpass Hit 7035 Extension Shelf 4.0 Technical ManualDmitry PNo ratings yet
- NC 10X - Noise Diode - NoisecommDocument4 pagesNC 10X - Noise Diode - NoisecommClara FortesNo ratings yet
- T.D.A 1524 PDFDocument16 pagesT.D.A 1524 PDFJose M PeresNo ratings yet
- Syllabus Signal and System IIDocument2 pagesSyllabus Signal and System IIkuntjoroNo ratings yet
- Description: AdditionalDocument2 pagesDescription: AdditionaljemiNo ratings yet
- Design of A 10kHz FilterDocument11 pagesDesign of A 10kHz FilterEriNo ratings yet
- Practical Digi Filter DesignDocument37 pagesPractical Digi Filter DesignHarithaBhanuNo ratings yet
- ELE 4613 - ProjectDocument6 pagesELE 4613 - ProjectmukulNo ratings yet
- TR 220 Operational ManualDocument76 pagesTR 220 Operational ManualSabby_SXBNo ratings yet
- Lecture Notes CS LWS FinalDocument56 pagesLecture Notes CS LWS FinalQuasiNo ratings yet
- What Are The Hot Research Topics in Wireless Communications in Demand by Top R&D Companies Like Qualcomm?Document27 pagesWhat Are The Hot Research Topics in Wireless Communications in Demand by Top R&D Companies Like Qualcomm?a_44mNo ratings yet
- ELX 121 - Digital Television MultiplexingDocument22 pagesELX 121 - Digital Television MultiplexingClark Linogao FelisildaNo ratings yet
- XDP Ii: Portable PD Recorder and Diagnostic SystemDocument2 pagesXDP Ii: Portable PD Recorder and Diagnostic Systemme_vahabiNo ratings yet
- WL 299CDocument19 pagesWL 299CSorin GhitaNo ratings yet
- Backbone SurveyDocument10 pagesBackbone SurveyAnonymous 1XnVQmNo ratings yet
- Difference between straight and crossover Ethernet cablesDocument7 pagesDifference between straight and crossover Ethernet cablesPatricia Blanca RamosNo ratings yet
- Improved Hamming Code For Error DetectionDocument20 pagesImproved Hamming Code For Error Detection陳鍾誠100% (1)
- GPRS/EDGE Territory FailureDocument12 pagesGPRS/EDGE Territory FailureGaurav MishraNo ratings yet
- AAU5972 Technical Specifications (V100R016C10 - 02) (PDF) - enDocument17 pagesAAU5972 Technical Specifications (V100R016C10 - 02) (PDF) - enOndra CizekNo ratings yet
- Unit 3 Tuned AmplifierDocument89 pagesUnit 3 Tuned Amplifiermohan100% (1)
- Wireless Communications Systems (DCS Unit-4)Document18 pagesWireless Communications Systems (DCS Unit-4)Mukesh100% (2)
- Rectangular To Circular Waveguide TransitionsDocument2 pagesRectangular To Circular Waveguide TransitionsAntonio P. Souza JuniorNo ratings yet
- ECEN-610: Low-Power CT Sigma-Delta ADC Design for Multi-Standard AppsDocument5 pagesECEN-610: Low-Power CT Sigma-Delta ADC Design for Multi-Standard AppsBinod AdhikariNo ratings yet
- 15.overview of WLL & CDMADocument16 pages15.overview of WLL & CDMAsdeNo ratings yet
- Lte Cqi Vs Pmi Vs Ri - Difference Between Lte Cqi, Pmi, RiDocument3 pagesLte Cqi Vs Pmi Vs Ri - Difference Between Lte Cqi, Pmi, RiEfosa AigbeNo ratings yet
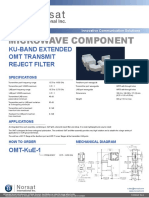
- Omt Kue 1 Spec SheetDocument1 pageOmt Kue 1 Spec Sheetappex onlineNo ratings yet
- Madhav Institute of Technology and Science Gwalior (M.P.) : Field: RFID Technology & Advanced Control SystemDocument13 pagesMadhav Institute of Technology and Science Gwalior (M.P.) : Field: RFID Technology & Advanced Control SystemSDK OSMNo ratings yet