You might also like
- Pose Controlled Physically-Based Motion: School of Computer Science and Engineering The Hebrew University of JerusalemDocument11 pagesPose Controlled Physically-Based Motion: School of Computer Science and Engineering The Hebrew University of JerusalemSangameshwar LabhishettyNo ratings yet
- Dynamic Humanoid Locomotion: A Scalable Formulation For HZD Gait OptimizationDocument18 pagesDynamic Humanoid Locomotion: A Scalable Formulation For HZD Gait OptimizationFajar MaulanaNo ratings yet
- LQR Control of A Humanoid RobotDocument6 pagesLQR Control of A Humanoid Robotkevin3ventocilla123No ratings yet
- Morphology-Independent Representation of Motions For Interactive Human-Like AnimationDocument11 pagesMorphology-Independent Representation of Motions For Interactive Human-Like AnimationAntoine RennuitNo ratings yet
- Whole-Body Motion Planning - Building Blocks For Intelligent SystemsDocument32 pagesWhole-Body Motion Planning - Building Blocks For Intelligent SystemssteffenspmNo ratings yet
- Online Walking Motion Generation With Automatic Foot Step PlacementDocument16 pagesOnline Walking Motion Generation With Automatic Foot Step PlacementMarioZarcoNo ratings yet
- A Force-Controllable Compact Actuator Module For A Wearable Hand ExoskeletonDocument6 pagesA Force-Controllable Compact Actuator Module For A Wearable Hand ExoskeletonKAREN DAYANA TRUJILLO BARRIOSNo ratings yet
- Quadrupedal Robots Whole-Body Motion Control BasedDocument17 pagesQuadrupedal Robots Whole-Body Motion Control BasedluukverstegenNo ratings yet
- Multi-Priority Control in Redundant Robotic Systems: Hamid Sadeghian, Luigi Villani, Mehdi Keshmiri, Bruno SicilianoDocument6 pagesMulti-Priority Control in Redundant Robotic Systems: Hamid Sadeghian, Luigi Villani, Mehdi Keshmiri, Bruno Sicilianosepehr rasooliNo ratings yet
- Used HydraulicDocument6 pagesUsed HydraulicIz CareyNo ratings yet
- Dynamically Equivalent Mechanism and Criteria For Multi-Segmental BalancingDocument1 pageDynamically Equivalent Mechanism and Criteria For Multi-Segmental BalancingLarry SmithNo ratings yet
- Motion and Force Control of Robot ManipulatorsDocument6 pagesMotion and Force Control of Robot ManipulatorsSajani N. BannekaNo ratings yet
- Atm1 2 2005 Sabanovic 17 27Document11 pagesAtm1 2 2005 Sabanovic 17 27Sang NhNo ratings yet
- AcyclicGait IROS08Document6 pagesAcyclicGait IROS08MARIO RICARDO ARBULU SAAVEDRANo ratings yet
- Passivity-Based Motion and Force Tracking Control For Constrained Elastic Joint RobotsDocument6 pagesPassivity-Based Motion and Force Tracking Control For Constrained Elastic Joint RobotsThanh Hai NguyenNo ratings yet
- Reduced Converted Implementation of A Hierarchical Controller On The MIT CheetahDocument26 pagesReduced Converted Implementation of A Hierarchical Controller On The MIT CheetahBRUNO ALEXIS ALCANTARA TACORANo ratings yet
- Ra Tip Over StabilityDocument7 pagesRa Tip Over StabilityNithil PasunuriNo ratings yet
- Quasi-Direct Drive Actuation For A Lightweight Hip Exoskeleton With High Backdrivability and High BandwidthDocument9 pagesQuasi-Direct Drive Actuation For A Lightweight Hip Exoskeleton With High Backdrivability and High Bandwidth李磊No ratings yet
- Research Methodology: MPSW5013Document3 pagesResearch Methodology: MPSW5013Ahmad Razin JasmiNo ratings yet
- Flexible Model Predictive Control Based On MultivaDocument15 pagesFlexible Model Predictive Control Based On MultivaangelNo ratings yet
- Momentum Control HIDDocument21 pagesMomentum Control HIDVicente EstopierNo ratings yet
- Research Interact With Human Statement 3Document12 pagesResearch Interact With Human Statement 3Alexander Waiganjo MachariaNo ratings yet
- Human Sit-to-Stand Transfer Modeling For Optimal Control of Assistive RobotsDocument7 pagesHuman Sit-to-Stand Transfer Modeling For Optimal Control of Assistive Robotsnadia.imranNo ratings yet
- How Can Human Motion Prediction Increase Transparency?Document6 pagesHow Can Human Motion Prediction Increase Transparency?jasposiris33No ratings yet
- High-Slope Terrain Locomotion For Torque-Controlled Quadruped RobotsDocument14 pagesHigh-Slope Terrain Locomotion For Torque-Controlled Quadruped RobotsPrathamesh SarafNo ratings yet
- Dynamic Modeling and Characterization of The Core-XY Cartesian Motion SystemDocument6 pagesDynamic Modeling and Characterization of The Core-XY Cartesian Motion Systemdumler v2No ratings yet
- Adaptive Force-Based Control For Legged RobotsDocument8 pagesAdaptive Force-Based Control For Legged RobotsdimtecNo ratings yet
- Del Mocap A Lo RealDocument10 pagesDel Mocap A Lo RealEsteban JaramilloNo ratings yet
- Control of A High Performance Bipedal Robot Using Viscoelastic Liquid Cooled ActuatorsDocument8 pagesControl of A High Performance Bipedal Robot Using Viscoelastic Liquid Cooled ActuatorsLuis SentisNo ratings yet
- Projection-Based Force Reflection Algorithm For Stable Bilateral Teleoperation Over NetworksDocument6 pagesProjection-Based Force Reflection Algorithm For Stable Bilateral Teleoperation Over Networkssamim_khNo ratings yet
- Adaptive Neural Network Based Backsteppi PDFDocument10 pagesAdaptive Neural Network Based Backsteppi PDFRizqih BlegurNo ratings yet
- Robust Stabilization of Elastic Joint Robots by ESP and PID Control Theory and ExperimentsDocument8 pagesRobust Stabilization of Elastic Joint Robots by ESP and PID Control Theory and ExperimentsThanh Hai NguyenNo ratings yet
- Mingl I 2004Document6 pagesMingl I 2004deepkumar donNo ratings yet
- 2007 Siggraph SimbiconDocument10 pages2007 Siggraph SimbiconkostasferNo ratings yet
- 1 s2.0 S092188902100155X MainDocument15 pages1 s2.0 S092188902100155X MainSherjanNo ratings yet
- Desapio 11Document9 pagesDesapio 11acarrascotaberaNo ratings yet
- Synchronized Motion Control For Process AutomationDocument6 pagesSynchronized Motion Control For Process Automationluc4sbrNo ratings yet
- 2020 BioRob ImpedanceDocument8 pages2020 BioRob ImpedanceRavi PrakashNo ratings yet
- Integrated Task Planning and Control For Mobile ManipulatorsDocument18 pagesIntegrated Task Planning and Control For Mobile ManipulatorsmanikandanmfgNo ratings yet
- Locomotion of A Tensegrity Robot Via Dynamically Coupled Modules by Rieffel, Stuk, Cuevas LipsonDocument3 pagesLocomotion of A Tensegrity Robot Via Dynamically Coupled Modules by Rieffel, Stuk, Cuevas LipsonTensegrity WikiNo ratings yet
- Relaxedik: Real-Time Synthesis of Accurate and Feasible Robot Arm MotionDocument9 pagesRelaxedik: Real-Time Synthesis of Accurate and Feasible Robot Arm MotionnrrdNo ratings yet
- Neuromechanical Model-Based Control of Bi-Lateral Ankle Exoskeletons: Biological Joint Torque and Electromyogram Reduction Across Walking ConditionsDocument14 pagesNeuromechanical Model-Based Control of Bi-Lateral Ankle Exoskeletons: Biological Joint Torque and Electromyogram Reduction Across Walking ConditionsAdrian CarhuazNo ratings yet
- tmpEF5E TMPDocument7 pagestmpEF5E TMPFrontiersNo ratings yet
- Dynamic Modelling of The Compliant KUKA-DLR Lightweight RobotDocument10 pagesDynamic Modelling of The Compliant KUKA-DLR Lightweight RobotAntonis KatsikarelisNo ratings yet
- Fast Swing-Up Trajectory Optimization For A Spherical Pendulum On A 7-DoF Collaborative RobotDocument7 pagesFast Swing-Up Trajectory Optimization For A Spherical Pendulum On A 7-DoF Collaborative RobotThanh Hai NguyenNo ratings yet
- Development and Evaluation of A 7-DOF Haptic InterfaceDocument9 pagesDevelopment and Evaluation of A 7-DOF Haptic InterfacellNo ratings yet
- Representation-Free Model Predictive Control For Dynamic Motions in QuadrupedsDocument18 pagesRepresentation-Free Model Predictive Control For Dynamic Motions in Quadrupeds이재봉No ratings yet
- A Whole-Body Control Framework For Humanoids Operating in Human EnvironmentsDocument8 pagesA Whole-Body Control Framework For Humanoids Operating in Human EnvironmentsSeymur ShukurzadeNo ratings yet
- Mechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorDocument12 pagesMechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorebrahimpanNo ratings yet
- Design of A 7 Degree-of-Freedom Upper-Limb Powered ExoskeletonDocument6 pagesDesign of A 7 Degree-of-Freedom Upper-Limb Powered Exoskeletonfaizar_2No ratings yet
- Wang 2015Document7 pagesWang 2015hs rezaeeNo ratings yet
- Poulakakis Grizzle ECC 07Document8 pagesPoulakakis Grizzle ECC 07hamletlNo ratings yet
- A Roadmap For Autonomous Robotic Assembl PDFDocument6 pagesA Roadmap For Autonomous Robotic Assembl PDFЛазар СимићNo ratings yet
- Wlding RobotDocument8 pagesWlding Robotameer hamzaNo ratings yet
- A Robotic Arm Using Pneumatic Movers PDFDocument7 pagesA Robotic Arm Using Pneumatic Movers PDFnovalandikaNo ratings yet
- An Operator-Focused Algorithm For Tele-Operating Mobile ManipulatorsDocument8 pagesAn Operator-Focused Algorithm For Tele-Operating Mobile ManipulatorsIoan DorofteiNo ratings yet
- Sa2013 PDFDocument11 pagesSa2013 PDFFelix Alfredo Vilchez TupayachiNo ratings yet
- Journal TMECH GROSSARDDocument13 pagesJournal TMECH GROSSARDGabriel Felippe PachecoNo ratings yet
- 0封面1Document27 pages0封面1CartelLordNo ratings yet
- Model BG01 & BG34Document12 pagesModel BG01 & BG34asrul fatahNo ratings yet
- Parts Catalog - Option Detail: Option Group Graphic Film Card DateDocument3 pagesParts Catalog - Option Detail: Option Group Graphic Film Card DateagvassNo ratings yet
- Arm Owi 535Document8 pagesArm Owi 535Felipe Apaza100% (1)
- Reduced Mechanism Approach of Modeling Premixed Propane-Air Mixture Using ANSYS FluentDocument20 pagesReduced Mechanism Approach of Modeling Premixed Propane-Air Mixture Using ANSYS FluentDinesh TPNo ratings yet
- SPM - Pump Products PDFDocument44 pagesSPM - Pump Products PDFmahmod alrousan100% (1)
- Medica Instrument PDFDocument1 pageMedica Instrument PDFkarthik kumarNo ratings yet
- 3512B Air Starter PDFDocument8 pages3512B Air Starter PDFMohamed RedaNo ratings yet
- Kawasaki JET MATE Service ManualDocument146 pagesKawasaki JET MATE Service Manualpaul bNo ratings yet
- Course Listing For Engineering ScienceDocument14 pagesCourse Listing For Engineering ScienceVirginTebowNo ratings yet
- Two Stage, Hi-Low External Gear Hydraulic Pumps: MODELS 1012, 1053 AND 1056Document4 pagesTwo Stage, Hi-Low External Gear Hydraulic Pumps: MODELS 1012, 1053 AND 1056TonuiNo ratings yet
- Purlin DesignDocument9 pagesPurlin DesignVhorn TiuNo ratings yet
- UtmDocument7 pagesUtmMirza Aqeel AhmedNo ratings yet
- V-Pages: Model: 914 70 Model Life 1970 1976Document460 pagesV-Pages: Model: 914 70 Model Life 1970 1976Mario LafargaNo ratings yet
- Zhilin 2006 APM EngDocument271 pagesZhilin 2006 APM EngFatima Om SalmanNo ratings yet
- Installation of Closed-Circuit Ammonia Refrigeration SystemsDocument28 pagesInstallation of Closed-Circuit Ammonia Refrigeration SystemsWalisson HenriqueNo ratings yet
- Wills Rings GB enDocument40 pagesWills Rings GB enJAYNo ratings yet
- JF506EDocument4 pagesJF506EAlfred Nobel100% (1)
- Development of Permanent Magnet (PM) Alternator For SG LHB CoachesDocument7 pagesDevelopment of Permanent Magnet (PM) Alternator For SG LHB CoachesStockquoteanalysis SqaNo ratings yet
- JQ1165 - Parts Manual Part 2 PDFDocument50 pagesJQ1165 - Parts Manual Part 2 PDFEnrique Ramirez100% (2)
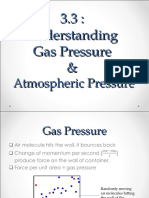
- 3.3 Gas & Atmospheric PressureDocument13 pages3.3 Gas & Atmospheric Pressureshazilla0% (1)
- Pipe Penetration Seals - HRST, Inc.Document3 pagesPipe Penetration Seals - HRST, Inc.KR PANo ratings yet
- ME 413 - Refrigeration EngineeringDocument2 pagesME 413 - Refrigeration EngineeringOrley G FadriquelNo ratings yet
- Relationships For Prediction of Backstay Effect in Tall Buildings With Core Wall System PDFDocument20 pagesRelationships For Prediction of Backstay Effect in Tall Buildings With Core Wall System PDFf430_boyNo ratings yet
- Spreadsheet 1137 19Document210 pagesSpreadsheet 1137 19SanteBrucoliNo ratings yet
- NAK Catalogue-Product OverviewDocument24 pagesNAK Catalogue-Product OverviewichsanNo ratings yet
- Spectacle Blinds - Closed Blinds Open Blinds (Ring Spacer)Document2 pagesSpectacle Blinds - Closed Blinds Open Blinds (Ring Spacer)Widiyanto WiwidNo ratings yet
- Cvsize (Control Valve Sizing)Document8 pagesCvsize (Control Valve Sizing)EslamSheblNo ratings yet
- ECU Designing and Testing Using National Instruments ProductsDocument7 pagesECU Designing and Testing Using National Instruments ProductsTYu4443No ratings yet
- ForgingDocument58 pagesForgingSamir Bose100% (4)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Autodesk Fusion 360 Black Book (V 2.0.6508) Part 2: Autodesk Fusion 360 Black Book (V 2.0.6508)From EverandAutodesk Fusion 360 Black Book (V 2.0.6508) Part 2: Autodesk Fusion 360 Black Book (V 2.0.6508)No ratings yet
- Designing SCADA Application Software: A Practical ApproachFrom EverandDesigning SCADA Application Software: A Practical ApproachNo ratings yet
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- The Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsFrom EverandThe Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsRating: 4.5 out of 5 stars4.5/5 (10)