You might also like
- Nonlinear Evolution Equations and Applications CIMPA, HAMMAMET, MARCH 22-31, 2012Document40 pagesNonlinear Evolution Equations and Applications CIMPA, HAMMAMET, MARCH 22-31, 2012Deepak Kumar Singh Res. Scholar., Dept. of Mechanical Engg., IIT (BHU)No ratings yet
- Malyshev-Diffraction by A Dielectric BallDocument12 pagesMalyshev-Diffraction by A Dielectric BallwriedtHB4No ratings yet
- How Instanton Combinatorics Solves Painleve VI V ADocument35 pagesHow Instanton Combinatorics Solves Painleve VI V ALeonardo BossiNo ratings yet
- Introduction To The Painlevé Property, Test and Analysis1 (R Conte & M Mussette)Document7 pagesIntroduction To The Painlevé Property, Test and Analysis1 (R Conte & M Mussette)Jason UchennnaNo ratings yet
- A Study of An Analytic Solution of 1D Heat Equation: April 21, 2019Document31 pagesA Study of An Analytic Solution of 1D Heat Equation: April 21, 2019manikandanNo ratings yet
- Methods For Solving Ordinary Differential Equations (Lecture Notes) - Peter PhilipDocument69 pagesMethods For Solving Ordinary Differential Equations (Lecture Notes) - Peter Philipvic1234059No ratings yet
- Ordinary Differential Equations and Applications: Mathematical Methods for Applied Mathematicians, Physicists, Engineers and BioscientistsFrom EverandOrdinary Differential Equations and Applications: Mathematical Methods for Applied Mathematicians, Physicists, Engineers and BioscientistsNo ratings yet
- Lie Symmetry Analysis, Group-Invariant Solutions and Dynamics of Solitons To The ($$2+1$$) - Dimensional Bogoyavlenskii-Schieff EquationDocument15 pagesLie Symmetry Analysis, Group-Invariant Solutions and Dynamics of Solitons To The ($$2+1$$) - Dimensional Bogoyavlenskii-Schieff EquationErickson OngNo ratings yet
- Pdes Mod 5 SummaryDocument11 pagesPdes Mod 5 SummaryTasha TanNo ratings yet
- Four Lectures On Weierstrass Elliptic Function and Applications in Classical and Quantum MechanicsDocument89 pagesFour Lectures On Weierstrass Elliptic Function and Applications in Classical and Quantum MechanicsMunam Shahzad MughalNo ratings yet
- Ktunotes - In: To Get More Study Materails Visit WWW - Ktunotes.inDocument3 pagesKtunotes - In: To Get More Study Materails Visit WWW - Ktunotes.inAdithyan JNo ratings yet
- LRR SpectralDocument78 pagesLRR SpectralGodwin LarryNo ratings yet
- Numerical Analysis: Dublin Institute of Technology, Kevin Street School of Mathematical Sciences A Course inDocument52 pagesNumerical Analysis: Dublin Institute of Technology, Kevin Street School of Mathematical Sciences A Course inAmir NelsonNo ratings yet
- Solving Nonlinear ODE and PDE Problems: Hans Petter LangtangenDocument69 pagesSolving Nonlinear ODE and PDE Problems: Hans Petter Langtangencristy_maxspeedNo ratings yet
- Dynamics of Differential EquationsDocument53 pagesDynamics of Differential EquationsblahNo ratings yet
- Lecture Notes in Mathematics: EditorsDocument314 pagesLecture Notes in Mathematics: EditorsgastonpereztabordaNo ratings yet
- Llibre ellipticPDEDocument214 pagesLlibre ellipticPDEvodanhvnNo ratings yet
- Differential Eqn.Document20 pagesDifferential Eqn.professorx4646No ratings yet
- M 651 Course NotesDocument39 pagesM 651 Course NotesNamsaknoi7No ratings yet
- Mso 203 BDocument127 pagesMso 203 BArjit KatareNo ratings yet
- Institute For Theoretical Physics, University o F UtrechtDocument25 pagesInstitute For Theoretical Physics, University o F UtrechtSantiago Ballesteros BarreraNo ratings yet
- Hyperbolic Space Time SingularitiesDocument12 pagesHyperbolic Space Time Singularitiesannunaki-1974No ratings yet
- CWI, Centre For Mathematics and Computer Science P.O.Box 4079, 1009 AB Amsterdam, The NetherlandsDocument16 pagesCWI, Centre For Mathematics and Computer Science P.O.Box 4079, 1009 AB Amsterdam, The NetherlandsGönenç Can AltunNo ratings yet
- 7491 Dmth517 Special Functions and Integral EquationDocument162 pages7491 Dmth517 Special Functions and Integral EquationnaughtydezireschdNo ratings yet
- A Collocation Approach For Solving High-Order Linear Fredholm-Volterra Integro-Differential EquationsDocument23 pagesA Collocation Approach For Solving High-Order Linear Fredholm-Volterra Integro-Differential EquationsNguyễn Thái DuyNo ratings yet
- The Neumann Problem for the Cauchy-Riemann Complex. (AM-75), Volume 75From EverandThe Neumann Problem for the Cauchy-Riemann Complex. (AM-75), Volume 75Rating: 4 out of 5 stars4/5 (2)
- ODE1Document108 pagesODE1Yonas D. EbrenNo ratings yet
- Series Solution of Euler-Bernoulli Beam Subjected To Concentrated Load Using Homotopy Perturbation Method (HPM)Document8 pagesSeries Solution of Euler-Bernoulli Beam Subjected To Concentrated Load Using Homotopy Perturbation Method (HPM)International Journal of Innovative Science and Research TechnologyNo ratings yet
- MATH 257 BookDocument81 pagesMATH 257 BookNorman CorbettNo ratings yet
- A First Course of Partial Differential Equations in Physical Sciences and Engineering - PDEbookDocument285 pagesA First Course of Partial Differential Equations in Physical Sciences and Engineering - PDEbookheidimary123No ratings yet
- Wavelets For Elliptical Waveguide Problems: April 2015Document7 pagesWavelets For Elliptical Waveguide Problems: April 2015Aury CastroNo ratings yet
- PDE Dive THM Page-16Document87 pagesPDE Dive THM Page-16sahlewel weldemichaelNo ratings yet
- Fifth China WenDocument7 pagesFifth China WenkaosanhumamNo ratings yet
- PDEbookDocument295 pagesPDEbookPrince KayNo ratings yet
- CE603: Partial Differential Equations (Instructor's Scribble) Expected OutcomeDocument12 pagesCE603: Partial Differential Equations (Instructor's Scribble) Expected OutcomeShreshth SinghNo ratings yet
- Ebook mst326 Block3 E1i1 n9780749223151 l1Document184 pagesEbook mst326 Block3 E1i1 n9780749223151 l1llynusNo ratings yet
- Abbas C. - Functional Analysis-Math 920 (Spring 2003) (2003)Document135 pagesAbbas C. - Functional Analysis-Math 920 (Spring 2003) (2003)Melania BerindeaNo ratings yet
- Complex Plane Representations and Stationary States in Cubic and Quintic Resonant SystemsDocument23 pagesComplex Plane Representations and Stationary States in Cubic and Quintic Resonant SystemsggNo ratings yet
- Lecture Notes On PDEs PDFDocument163 pagesLecture Notes On PDEs PDFSimone SecchiNo ratings yet
- Matbematicae: Ordinary Differential Equations, Transport Theory and Sobolev SpacesDocument37 pagesMatbematicae: Ordinary Differential Equations, Transport Theory and Sobolev SpacesJoseph MartinNo ratings yet
- Partial Differential Equations in Applied MathematicsDocument6 pagesPartial Differential Equations in Applied MathematicsMd. AsaduzzamanNo ratings yet
- Mathieu Functions and Numerical Solutions of The Mathieu EquationDocument12 pagesMathieu Functions and Numerical Solutions of The Mathieu EquationJORGE ORTEGANo ratings yet
- Mathieu Functions and Numerical Solutions of The Mathieu EquationDocument12 pagesMathieu Functions and Numerical Solutions of The Mathieu EquationJORGE ORTEGANo ratings yet
- 1 s2.0 S0096300316302673 MainDocument16 pages1 s2.0 S0096300316302673 Mainjoginder singhNo ratings yet
- Graph NotesDocument107 pagesGraph Noteslivingstoneopio2No ratings yet
- Article NovoDocument52 pagesArticle Novorahim.sihadjmohandNo ratings yet
- MathsylDocument3 pagesMathsylDionne TheirinNo ratings yet
- FD v2 BookDocument102 pagesFD v2 BookXander LaiingtonNo ratings yet
- 17 Differential Equations Ma102Document3 pages17 Differential Equations Ma102Salim ShahulNo ratings yet
- PhysRevD 104 025016Document9 pagesPhysRevD 104 025016Martin WolffeNo ratings yet
- Mitran Numerical PDENotesDocument113 pagesMitran Numerical PDENotesadnaneNo ratings yet
- An Introduction To Semilinear Elliptic Equations: Thierry CazenaveDocument139 pagesAn Introduction To Semilinear Elliptic Equations: Thierry CazenaveStefanoNo ratings yet
- Introduction To Partial Differential Equations: Lecture Notes On Mathematical PhysicsDocument37 pagesIntroduction To Partial Differential Equations: Lecture Notes On Mathematical PhysicsLorenzo MaffioliNo ratings yet
- A Poincar E-Bendixson Theorem For Scalar Reaction Diffusion EquationsDocument38 pagesA Poincar E-Bendixson Theorem For Scalar Reaction Diffusion EquationsSilvia BoscatoNo ratings yet
- Lucio Boccardo, Gisella Croce - Elliptic Partial Differential Equations-De Gruyter (2013)Document204 pagesLucio Boccardo, Gisella Croce - Elliptic Partial Differential Equations-De Gruyter (2013)Amanda Clara ArrudaNo ratings yet
- Intro To Method of Multiple ScalesDocument65 pagesIntro To Method of Multiple ScalesrickyspaceguyNo ratings yet
- Moxyyy MtoDocument4 pagesMoxyyy MtoJason UchennnaNo ratings yet
- Examples of Isometric Texts: All Written Information Should Remain OnDocument1 pageExamples of Isometric Texts: All Written Information Should Remain OnJason UchennnaNo ratings yet
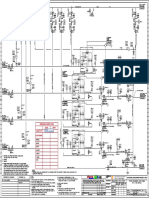
- P&IDDocument1 pageP&IDJason UchennnaNo ratings yet
- The Riccati and Ermakov-Pinney HierarchiesDocument21 pagesThe Riccati and Ermakov-Pinney HierarchiesJason UchennnaNo ratings yet
- A Computational Approach For The Analytical Solving of Partial Differential Equations (Cheb-Terrab, E.S., and Von Bulow, K.)Document18 pagesA Computational Approach For The Analytical Solving of Partial Differential Equations (Cheb-Terrab, E.S., and Von Bulow, K.)Jason UchennnaNo ratings yet
- New Pdms CommAndsDocument19 pagesNew Pdms CommAndsJason UchennnaNo ratings yet
- FUnction ApproximationDocument40 pagesFUnction ApproximationJason UchennnaNo ratings yet
- Z G W Z F DZ DW W DZ W D: Ince, E. L. (1926) - Ordinary Differential Equations. London: LongmansDocument1 pageZ G W Z F DZ DW W DZ W D: Ince, E. L. (1926) - Ordinary Differential Equations. London: LongmansJason UchennnaNo ratings yet
- Lesson 33Document15 pagesLesson 33Jason UchennnaNo ratings yet
- UntitledDocument1 pageUntitledJason UchennnaNo ratings yet
- Hidden and Contact SymmetriesDocument11 pagesHidden and Contact SymmetriesJason UchennnaNo ratings yet
- Some Materials From BookseeDocument2 pagesSome Materials From BookseeJason UchennnaNo ratings yet
- Dear Sir, Below Is The Equation I Referred To in The Email.: W Z F C DZ DW W DZ W DDocument1 pageDear Sir, Below Is The Equation I Referred To in The Email.: W Z F C DZ DW W DZ W DJason UchennnaNo ratings yet
- My Attempt 1Document2 pagesMy Attempt 1Jason UchennnaNo ratings yet
- MDPL Asha DeepDocument1 pageMDPL Asha DeepJason UchennnaNo ratings yet
- MDPL 9-60tDocument2 pagesMDPL 9-60tJason UchennnaNo ratings yet
- MORAYODocument2 pagesMORAYOJason UchennnaNo ratings yet
- Alfred RamaniDocument2 pagesAlfred RamaniJason UchennnaNo ratings yet
- Robert Conte'sDocument11 pagesRobert Conte'sJason UchennnaNo ratings yet
- Crest Star 3 - SpecsDocument3 pagesCrest Star 3 - SpecsJason UchennnaNo ratings yet
- Applications: Functions andDocument350 pagesApplications: Functions andJason UchennnaNo ratings yet
- The American StatisticianDocument3 pagesThe American StatisticianJason UchennnaNo ratings yet
- Generalized - Hypergeometric Series (Wilfrid Norman Bailey)Document59 pagesGeneralized - Hypergeometric Series (Wilfrid Norman Bailey)Jason UchennnaNo ratings yet
- Gcei Slides 110325Document79 pagesGcei Slides 110325Jason UchennnaNo ratings yet
- Solvable Models of Relativistic Charged Spherically Symmetric Fluids (Rod Halburd)Document15 pagesSolvable Models of Relativistic Charged Spherically Symmetric Fluids (Rod Halburd)Jason UchennnaNo ratings yet
- SOLVABLE MODELS OF RELATIVISTIC CHARGED fLUID SPHERE (ROD HALBURD)Document22 pagesSOLVABLE MODELS OF RELATIVISTIC CHARGED fLUID SPHERE (ROD HALBURD)Jason UchennnaNo ratings yet
- Section of A Fibre BundleDocument2 pagesSection of A Fibre BundleJason UchennnaNo ratings yet
- A Primer On Elliptic Functions With Applications in Classical Mechanics (Alan Blaisard)Document23 pagesA Primer On Elliptic Functions With Applications in Classical Mechanics (Alan Blaisard)Jason UchennnaNo ratings yet
- Introduction To The Painlevé Property, Test and Analysis1 (R Conte & M Mussette)Document7 pagesIntroduction To The Painlevé Property, Test and Analysis1 (R Conte & M Mussette)Jason UchennnaNo ratings yet
- Lectures On Divergent Series (Emile Borel)Document129 pagesLectures On Divergent Series (Emile Borel)Jason UchennnaNo ratings yet
- Week 1Document23 pagesWeek 1吉利蘇No ratings yet
- Paper: Iit-Jam 2008Document5 pagesPaper: Iit-Jam 2008Mr MNo ratings yet
- Dokumen - Tips - Calculus 9th Edition Content Dale Varberg Edwin Purcell and Steve RigdonDocument17 pagesDokumen - Tips - Calculus 9th Edition Content Dale Varberg Edwin Purcell and Steve RigdonMardi SuspendNo ratings yet
- Syllabi - Mathematics PDFDocument119 pagesSyllabi - Mathematics PDFNanda GopalNo ratings yet
- Linear Differential Equations of Order - 100931Document11 pagesLinear Differential Equations of Order - 100931DebbieNo ratings yet
- Course PlanDocument2 pagesCourse Planitsmekrishna2006No ratings yet
- Mechanical Engineering Course OutlineDocument5 pagesMechanical Engineering Course OutlineDavidNo ratings yet
- B.SC - II Year Maths PDFDocument8 pagesB.SC - II Year Maths PDFViswas Kumar Jha0% (1)
- Term Paper of Mathematics On Ordinary Differential Equations of Higher OrderDocument4 pagesTerm Paper of Mathematics On Ordinary Differential Equations of Higher OrderSagnik DasNo ratings yet
- 18.IT Final PDFDocument106 pages18.IT Final PDFN Elamathi AP/ITNo ratings yet
- Ch2and6for246 PDFDocument43 pagesCh2and6for246 PDFKhay NochefrancaNo ratings yet
- Ma6351 Tpde PDFDocument295 pagesMa6351 Tpde PDFNe En JoviNo ratings yet
- Ordinary Differential EquationDocument3 pagesOrdinary Differential EquationDeepak Kumar SinghNo ratings yet
- GATE Syllabus - Electrical Engineering - EE: Linear AlgebraDocument3 pagesGATE Syllabus - Electrical Engineering - EE: Linear AlgebradeepNo ratings yet
- Basic Control Systems EngineeringDocument457 pagesBasic Control Systems EngineeringBinh Le Khac82% (17)
- Combinatorial Mathematics Business Mathematics Special Theory of Relativity-I Computational Mathematics Lab-IDocument13 pagesCombinatorial Mathematics Business Mathematics Special Theory of Relativity-I Computational Mathematics Lab-IBurnwal RNo ratings yet
- Assignment 2 SolutionsDocument7 pagesAssignment 2 SolutionsShafry YusufNo ratings yet
- Topic 4 - Power Series - Q&A - Q1-Q6Document12 pagesTopic 4 - Power Series - Q&A - Q1-Q6deivasigamaniNo ratings yet
- Adrian Burd - Mathematical Methods in The Earth and Environmental Sciences-Cambridge University Press (2019) PDFDocument599 pagesAdrian Burd - Mathematical Methods in The Earth and Environmental Sciences-Cambridge University Press (2019) PDFTheilon HenriqueNo ratings yet
- Hand Book Mathematics 2020Document45 pagesHand Book Mathematics 2020ogboleobekpaNo ratings yet
- How To Solve This Linear ODE With Time-Varying CoefficientsDocument3 pagesHow To Solve This Linear ODE With Time-Varying CoefficientsHector TrianaNo ratings yet
- Btech SYLLABUSDocument99 pagesBtech SYLLABUSsushree ankitaNo ratings yet
- GATE 2011 SyllabusDocument60 pagesGATE 2011 SyllabusSaheb SamantaNo ratings yet
- R18 B.Tech. Aeronautical Engg. Syllabus Jntu HyderabadDocument119 pagesR18 B.Tech. Aeronautical Engg. Syllabus Jntu HyderabadAhmed FurqanNo ratings yet
- UG MathematicsDocument65 pagesUG MathematicsSubhaNo ratings yet
- MathDocument3 pagesMathAdithyan PaiNo ratings yet
- Theoretical Background of ESAComp Analyses - PART V - Adhesive Bonded Joints - Bolted JointsDocument57 pagesTheoretical Background of ESAComp Analyses - PART V - Adhesive Bonded Joints - Bolted JointsOliver RailaNo ratings yet
- ODEs 2023 1 PDFDocument25 pagesODEs 2023 1 PDFWar LockNo ratings yet
- Assignment-11 de QuestionsDocument3 pagesAssignment-11 de QuestionsJam SilverioNo ratings yet
- UG R19 Civil Engg 4years CS SyllabusDocument186 pagesUG R19 Civil Engg 4years CS SyllabuslavanyaNo ratings yet