You might also like
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Mixed Correlation Functions of The Two-Matrix Model: M. Bertola B. EynardDocument18 pagesMixed Correlation Functions of The Two-Matrix Model: M. Bertola B. EynardSîImoHäāķīīmNo ratings yet
- MTH403 (23-28)Document28 pagesMTH403 (23-28)Tahir KhanNo ratings yet
- Applied Mathematics and Computation: Alper Korkmaz, Idris Da GDocument12 pagesApplied Mathematics and Computation: Alper Korkmaz, Idris Da GLaila FouadNo ratings yet
- MN06 OkDocument21 pagesMN06 OkElena DamocNo ratings yet
- The Taxi FunctionDocument7 pagesThe Taxi FunctionIAES International Journal of Robotics and AutomationNo ratings yet
- Analytical - FinalDocument10 pagesAnalytical - FinalHayder AlsarajNo ratings yet
- Curve Interpolation. Newton's Divided Differences. Lagrange PolynomialsDocument4 pagesCurve Interpolation. Newton's Divided Differences. Lagrange PolynomialsAhmet GelisliNo ratings yet
- InterpolationDocument5 pagesInterpolationMengistu AbebeNo ratings yet
- Yogesh Meena (BCA-M15 4th SEM) CONM CCEDocument10 pagesYogesh Meena (BCA-M15 4th SEM) CONM CCEYogesh MeenaNo ratings yet
- Adaptive Control Design and AnalysisDocument45 pagesAdaptive Control Design and Analysishind90No ratings yet
- Visualizing The Components of Lagrange and Newton InterpolationDocument17 pagesVisualizing The Components of Lagrange and Newton InterpolationjemuelNo ratings yet
- Output-Feedback Stabilization of Stochastic Nonlinear Systems Driven by Noise of Unknown CovarianceDocument10 pagesOutput-Feedback Stabilization of Stochastic Nonlinear Systems Driven by Noise of Unknown CovarianceEva KaslikNo ratings yet
- Second Order Riccati Equation : Rational Approximations To The Solution of TheDocument5 pagesSecond Order Riccati Equation : Rational Approximations To The Solution of TheAlok PradhanNo ratings yet
- A Constructive Method For Uniform Approximation On Two Dimensional IntervalDocument7 pagesA Constructive Method For Uniform Approximation On Two Dimensional IntervalSebestyén ZoltánNo ratings yet
- Legendre PDFDocument2 pagesLegendre PDFgabao123No ratings yet
- I. Quadratic Forms and Canonical Forms: X X A X X A X A X X A X ADocument11 pagesI. Quadratic Forms and Canonical Forms: X X A X X A X A X X A X AyyryNo ratings yet
- Optimal Filtering With Aerospace Applications: Section 2.2: Linear SystemsDocument37 pagesOptimal Filtering With Aerospace Applications: Section 2.2: Linear Systemsdayvox10No ratings yet
- Question BaNK (New) Soft Branches IVCSDocument7 pagesQuestion BaNK (New) Soft Branches IVCSpukkokignoNo ratings yet
- Lévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Document17 pagesLévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Dony HidayatNo ratings yet
- InterpolationDocument51 pagesInterpolationMuddys007No ratings yet
- Advanced Digital Control Syst EE554: Discrete Time SystemsDocument41 pagesAdvanced Digital Control Syst EE554: Discrete Time SystemsAbdullah AloglaNo ratings yet
- HMWK 1Document3 pagesHMWK 1Jasmine NguyenNo ratings yet
- InterpolationDocument7 pagesInterpolationNivi SenthilNo ratings yet
- MATH3101 t711Document2 pagesMATH3101 t711brip selNo ratings yet
- Equi-Statistical Convergence of Positive Linear Operators: Sevda Karaku S, Kamil DemirciDocument12 pagesEqui-Statistical Convergence of Positive Linear Operators: Sevda Karaku S, Kamil DemirciYiğit ErpakNo ratings yet
- Bunny1 EliaDocument38 pagesBunny1 EliaLewis PattenNo ratings yet
- Interpolation and Polynomial Approximation 3.1 Interpolation and The Lagrange PolynomialDocument7 pagesInterpolation and Polynomial Approximation 3.1 Interpolation and The Lagrange PolynomialImran Afzal BhatNo ratings yet
- Section 3. Fourier Series and Periodic Functions: F (X) F (X + P) For Any X, and Fixed Period PDocument31 pagesSection 3. Fourier Series and Periodic Functions: F (X) F (X + P) For Any X, and Fixed Period PboucyNo ratings yet
- On Generalizations and Refinements of Triangle Inequalities: Tamotsu IzumidaDocument74 pagesOn Generalizations and Refinements of Triangle Inequalities: Tamotsu IzumidaFustei BogdanNo ratings yet
- AP Calculus BC Stuff You Must KnowDocument7 pagesAP Calculus BC Stuff You Must KnowJulian PradeepNo ratings yet
- Interplation and Poynomial Approximation CH 4Document13 pagesInterplation and Poynomial Approximation CH 4Coder DNo ratings yet
- CSF-Filtered Henon Map - 2022 - PREPRINTDocument17 pagesCSF-Filtered Henon Map - 2022 - PREPRINTMarcioNo ratings yet
- 3 Ord NR KingDocument7 pages3 Ord NR KingImportadora Boliviana de MedicamentosNo ratings yet
- Partial Fraction Exercise PDFDocument4 pagesPartial Fraction Exercise PDFChai Usajai UsajaiNo ratings yet
- Control Theory - Digital Control SystemDocument8 pagesControl Theory - Digital Control System1realestabassNo ratings yet
- Radius of Curvature and Evolute of The Function Y F (X) : DX DF DX Dy DX Ds DyDocument7 pagesRadius of Curvature and Evolute of The Function Y F (X) : DX DF DX Dy DX Ds DySaddam HusainNo ratings yet
- Stochastic Dynamic Modeling of Damped Lotka-Volterra SystemDocument9 pagesStochastic Dynamic Modeling of Damped Lotka-Volterra SystemSandip BanerjeeNo ratings yet
- Newton PolynomialsDocument3 pagesNewton PolynomialsMuhammad Ahtisham AsifNo ratings yet
- Diophantine Conditions and Real or Complex Brjuno Functions: 1 Hamiltonian Chaos and The Standard MapDocument19 pagesDiophantine Conditions and Real or Complex Brjuno Functions: 1 Hamiltonian Chaos and The Standard MapStefano MarmiNo ratings yet
- Add Maths Formulae ListDocument8 pagesAdd Maths Formulae ListWong Hui SeanNo ratings yet
- The Power of Taylor and Maclaurin Series in Actuarial MathematicsDocument13 pagesThe Power of Taylor and Maclaurin Series in Actuarial MathematicsJMV Dela CruzNo ratings yet
- 1 s2.0 S0021904520301209 MainDocument36 pages1 s2.0 S0021904520301209 Mainafaf boudeboudaNo ratings yet
- Weak 2Document28 pagesWeak 2NELSON GIORDANO PINEDA ARRASCUENo ratings yet
- FP2C7 Maclaurin and Taylor SeriesDocument2 pagesFP2C7 Maclaurin and Taylor SeriesLoh Jun XianNo ratings yet
- Predicting ARMA Processes: T T 2 T TDocument8 pagesPredicting ARMA Processes: T T 2 T TVidaup40No ratings yet
- International Journal of Pure and Applied Mathematics No. 1 2014, 85-94Document10 pagesInternational Journal of Pure and Applied Mathematics No. 1 2014, 85-94Importadora Boliviana de MedicamentosNo ratings yet
- Las 6-7Document8 pagesLas 6-7lalaineNo ratings yet
- Runge Kutta FormulasDocument2 pagesRunge Kutta FormulasumsterfigoNo ratings yet
- Journal of Mathematical Analysis and Applications: N.M. Ivanova, C. Sophocleous, P.G.L. LeachDocument14 pagesJournal of Mathematical Analysis and Applications: N.M. Ivanova, C. Sophocleous, P.G.L. LeachDewi Sartika TampubolonNo ratings yet
- Spiral Singularities of A SemiflowDocument14 pagesSpiral Singularities of A SemiflowKamil DunstNo ratings yet
- Computers and Mathematics With Applications: Xiuhua Wang, Jisheng Kou, Chuanqing GuDocument6 pagesComputers and Mathematics With Applications: Xiuhua Wang, Jisheng Kou, Chuanqing GuSyed Ubaid ur RehmanNo ratings yet
- Quantum Tunneling Through A BarrierDocument12 pagesQuantum Tunneling Through A Barrierjasmine-rNo ratings yet
- Fast Support Vector Classifier With Quantile: School of Mathematical Sciences, Inner Mongolia University, ChinaDocument7 pagesFast Support Vector Classifier With Quantile: School of Mathematical Sciences, Inner Mongolia University, ChinaJagan J Jagan JNo ratings yet
- Finite DifferenceDocument9 pagesFinite DifferenceSiddra KhawarNo ratings yet
- Numericla MethodDocument45 pagesNumericla Methodsubrozn GamerNo ratings yet
- Marah Alqedra 22304092 HW## Report PDFDocument22 pagesMarah Alqedra 22304092 HW## Report PDFMajda Al-JbourNo ratings yet
- Isi Msqe 2008Document13 pagesIsi Msqe 2008chinmayaNo ratings yet
- Vladimir S. Gerdjikov and Georgi G. Grahovski - Multi-Component NLS and MKDV Models On Symmetric Spaces and Generalized Fourier TransformsDocument40 pagesVladimir S. Gerdjikov and Georgi G. Grahovski - Multi-Component NLS and MKDV Models On Symmetric Spaces and Generalized Fourier TransformsPomac232No ratings yet
- Chapter 3. Polynomial Interpolation/Function ApproximationDocument11 pagesChapter 3. Polynomial Interpolation/Function ApproximationAnonymous 80p9OVNo ratings yet
- Moxyyy MtoDocument4 pagesMoxyyy MtoJason UchennnaNo ratings yet
- Examples of Isometric Texts: All Written Information Should Remain OnDocument1 pageExamples of Isometric Texts: All Written Information Should Remain OnJason UchennnaNo ratings yet
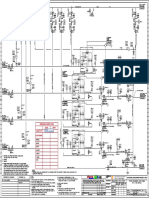
- P&IDDocument1 pageP&IDJason UchennnaNo ratings yet
- The Painlev e Methods (R. Conte and M. Mussette)Document29 pagesThe Painlev e Methods (R. Conte and M. Mussette)Jason UchennnaNo ratings yet
- A Computational Approach For The Analytical Solving of Partial Differential Equations (Cheb-Terrab, E.S., and Von Bulow, K.)Document18 pagesA Computational Approach For The Analytical Solving of Partial Differential Equations (Cheb-Terrab, E.S., and Von Bulow, K.)Jason UchennnaNo ratings yet
- New Pdms CommAndsDocument19 pagesNew Pdms CommAndsJason UchennnaNo ratings yet
- FUnction ApproximationDocument40 pagesFUnction ApproximationJason UchennnaNo ratings yet
- UntitledDocument1 pageUntitledJason UchennnaNo ratings yet
- Lesson 33Document15 pagesLesson 33Jason UchennnaNo ratings yet
- Some Materials From BookseeDocument2 pagesSome Materials From BookseeJason UchennnaNo ratings yet
- Z G W Z F DZ DW W DZ W D: Ince, E. L. (1926) - Ordinary Differential Equations. London: LongmansDocument1 pageZ G W Z F DZ DW W DZ W D: Ince, E. L. (1926) - Ordinary Differential Equations. London: LongmansJason UchennnaNo ratings yet
- My Attempt 1Document2 pagesMy Attempt 1Jason UchennnaNo ratings yet
- The Riccati and Ermakov-Pinney HierarchiesDocument21 pagesThe Riccati and Ermakov-Pinney HierarchiesJason UchennnaNo ratings yet
- Dear Sir, Below Is The Equation I Referred To in The Email.: W Z F C DZ DW W DZ W DDocument1 pageDear Sir, Below Is The Equation I Referred To in The Email.: W Z F C DZ DW W DZ W DJason UchennnaNo ratings yet
- MDPL Asha DeepDocument1 pageMDPL Asha DeepJason UchennnaNo ratings yet
- MDPL 9-60tDocument2 pagesMDPL 9-60tJason UchennnaNo ratings yet
- MORAYODocument2 pagesMORAYOJason UchennnaNo ratings yet
- Hidden and Contact SymmetriesDocument11 pagesHidden and Contact SymmetriesJason UchennnaNo ratings yet
- Robert Conte'sDocument11 pagesRobert Conte'sJason UchennnaNo ratings yet
- Crest Star 3 - SpecsDocument3 pagesCrest Star 3 - SpecsJason UchennnaNo ratings yet
- Applications: Functions andDocument350 pagesApplications: Functions andJason UchennnaNo ratings yet
- The American StatisticianDocument3 pagesThe American StatisticianJason UchennnaNo ratings yet
- Generalized - Hypergeometric Series (Wilfrid Norman Bailey)Document59 pagesGeneralized - Hypergeometric Series (Wilfrid Norman Bailey)Jason UchennnaNo ratings yet
- Gcei Slides 110325Document79 pagesGcei Slides 110325Jason UchennnaNo ratings yet
- Solvable Models of Relativistic Charged Spherically Symmetric Fluids (Rod Halburd)Document15 pagesSolvable Models of Relativistic Charged Spherically Symmetric Fluids (Rod Halburd)Jason UchennnaNo ratings yet
- SOLVABLE MODELS OF RELATIVISTIC CHARGED fLUID SPHERE (ROD HALBURD)Document22 pagesSOLVABLE MODELS OF RELATIVISTIC CHARGED fLUID SPHERE (ROD HALBURD)Jason UchennnaNo ratings yet
- Section of A Fibre BundleDocument2 pagesSection of A Fibre BundleJason UchennnaNo ratings yet
- A Primer On Elliptic Functions With Applications in Classical Mechanics (Alan Blaisard)Document23 pagesA Primer On Elliptic Functions With Applications in Classical Mechanics (Alan Blaisard)Jason UchennnaNo ratings yet
- Introduction To The Painlevé Property, Test and Analysis1 (R Conte & M Mussette)Document7 pagesIntroduction To The Painlevé Property, Test and Analysis1 (R Conte & M Mussette)Jason UchennnaNo ratings yet
- Lectures On Divergent Series (Emile Borel)Document129 pagesLectures On Divergent Series (Emile Borel)Jason UchennnaNo ratings yet
- Yr7 FormingAlgebraicExpressions Ex3Document2 pagesYr7 FormingAlgebraicExpressions Ex3mary joy fajardoNo ratings yet
- Study Material 6th Maths, 2023-24Document101 pagesStudy Material 6th Maths, 2023-24tanaydhanvinNo ratings yet
- GE3 Science, Technolog Y and SocietyDocument14 pagesGE3 Science, Technolog Y and SocietyAngelica PagaduanNo ratings yet
- Solving Multi Objective Linear Fractional Programming Problem Under Uncertainty Via Robust Optimization ApproachDocument11 pagesSolving Multi Objective Linear Fractional Programming Problem Under Uncertainty Via Robust Optimization ApproachBasiya KakawlaNo ratings yet
- MATH 322: Probability and Statistical MethodsDocument27 pagesMATH 322: Probability and Statistical MethodsAwab AbdelhadiNo ratings yet
- DMGT-module6 and 7Document50 pagesDMGT-module6 and 7manish 2003No ratings yet
- Quadratic Equations-3Document46 pagesQuadratic Equations-3jitender80% (1)
- Diffie-Hellman Key Agreement: 14.1 Cyclic GroupsDocument6 pagesDiffie-Hellman Key Agreement: 14.1 Cyclic GroupsSanjay DuttNo ratings yet
- Chapter 5 Mixed ReviewDocument5 pagesChapter 5 Mixed ReviewEnric0 Pu44INo ratings yet
- 3.module 2. Measuremsnts in Analytical ChemistryDocument19 pages3.module 2. Measuremsnts in Analytical ChemistryKim MalangNo ratings yet
- Shs Genmath Module 8 Core Revised DuenasDocument42 pagesShs Genmath Module 8 Core Revised DuenasAPRIL JOY ARREOLANo ratings yet
- Introductory ProblemsDocument2 pagesIntroductory ProblemspepeNo ratings yet
- Target 70 +90Document56 pagesTarget 70 +90k n tiwary50% (2)
- Product Optimization: Sunil Pillai EPS-EOL-Vadinar May 24, 2010Document39 pagesProduct Optimization: Sunil Pillai EPS-EOL-Vadinar May 24, 2010Sunil PillaiNo ratings yet
- SM 17 18 XII Mathematics Unit-3 Section-BDocument6 pagesSM 17 18 XII Mathematics Unit-3 Section-BAkash PandeyNo ratings yet
- The Mosers Formula For The Division of The CircleDocument12 pagesThe Mosers Formula For The Division of The Circlesamir anisNo ratings yet
- Developing Practice, Developing PractitionersDocument30 pagesDeveloping Practice, Developing PractitionersAlonso GaxiolaNo ratings yet
- Precalculus ExamDocument4 pagesPrecalculus ExamAnthea ClarkeNo ratings yet
- Complex1 PDFDocument14 pagesComplex1 PDFKrish Pavan100% (1)
- Final Exam SolutionsDocument9 pagesFinal Exam SolutionskudzaiNo ratings yet
- Statistical PhysicsDocument293 pagesStatistical PhysicsZeen Majid100% (4)
- CADocument11 pagesCAAnkita SondhiNo ratings yet
- Saxon Algebra 2 Homework AnswersDocument5 pagesSaxon Algebra 2 Homework Answersafmoanrbd50% (2)
- Timetable ILPDocument6 pagesTimetable ILPJimmy López PortilloNo ratings yet
- Tesis FluidsDocument673 pagesTesis Fluidsartimus_2kNo ratings yet
- Number SystemDocument14 pagesNumber SystemrakeshmachhiNo ratings yet
- Triangulated Irregular NetworkDocument9 pagesTriangulated Irregular NetworkRizal FirmansyahNo ratings yet
- Solution To Problem From Rich and KnightDocument2 pagesSolution To Problem From Rich and Knightsomi26No ratings yet
- Dilr 10Document102 pagesDilr 10gargi pimplaskarNo ratings yet
- Linear Programming: Dr. Asif Akhtar Assistant Professor Department of Business Administration, AMU Mob: 9897447806Document18 pagesLinear Programming: Dr. Asif Akhtar Assistant Professor Department of Business Administration, AMU Mob: 9897447806Hitesh ParasharNo ratings yet