You might also like
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Thrust Load Meter: User ManualDocument12 pagesThrust Load Meter: User ManualparidapapuNo ratings yet
- Nductive Istance Easurement (IDM) Tool Kit: User Manual: (Draft Version)Document24 pagesNductive Istance Easurement (IDM) Tool Kit: User Manual: (Draft Version)Mohammed gNo ratings yet
- MKM ManualDocument59 pagesMKM ManualGilberto PérezNo ratings yet
- How To Repair Kiln Tire and Roller WearDocument28 pagesHow To Repair Kiln Tire and Roller WearNaelNo ratings yet
- Creep Monitor Manual 7Document16 pagesCreep Monitor Manual 7amirhabibpak9No ratings yet
- TTT MW ManualDocument16 pagesTTT MW ManualTarcilio FonsecaNo ratings yet
- Ultimo PremierDocument89 pagesUltimo Premiergonzalorod100% (1)
- Measuring Wheel Manual 1Document20 pagesMeasuring Wheel Manual 1Viet Nam M-TechNo ratings yet
- Kiln Shell Laser: User ManualDocument20 pagesKiln Shell Laser: User ManualAhmad Nil ForoushanNo ratings yet
- Instrument Anritsu Specanalyzer Measure Guide PDFDocument210 pagesInstrument Anritsu Specanalyzer Measure Guide PDFduymanhhusNo ratings yet
- User's Manual: AXF Magnetic Flowmeter Integral Flowmeter Remote Flowtube (Hardware Edition)Document120 pagesUser's Manual: AXF Magnetic Flowmeter Integral Flowmeter Remote Flowtube (Hardware Edition)Efrain Parra QuispeNo ratings yet
- User's Manual AXF Magnetic Flowmeter Integral Flowmeter Remote Flowtube (Hardware EditionDocument118 pagesUser's Manual AXF Magnetic Flowmeter Integral Flowmeter Remote Flowtube (Hardware Editionbiotech666No ratings yet
- Kiln Shell Laser Manual 1Document24 pagesKiln Shell Laser Manual 1uddinsalahNo ratings yet
- Rotary Inclinometer III Manual 1Document20 pagesRotary Inclinometer III Manual 1edgar torrezNo ratings yet
- Procedimeinto Mtto Rayos X Portatil VillaDocument20 pagesProcedimeinto Mtto Rayos X Portatil VillaStefania MoralesNo ratings yet
- K-Bridge Ecdis OperatorsDocument716 pagesK-Bridge Ecdis Operatorsmrraj69100% (10)
- Attuatori Multigiro-AumaDocument72 pagesAttuatori Multigiro-AumaAnonymous fbeCwgBFY50% (2)
- GD-1220 SHF en 0006Document176 pagesGD-1220 SHF en 0006Adorjan Sandor ZoltanNo ratings yet
- TSE 10 ManualDocument100 pagesTSE 10 Manualmmason.verschurenNo ratings yet
- Spectrum Analyzer Measurement GuideDocument266 pagesSpectrum Analyzer Measurement Guidechuzv11No ratings yet
- Furunon LS 6100Document47 pagesFurunon LS 6100Hoang Anh NguyenNo ratings yet
- Man lxt-280Document57 pagesMan lxt-280Naser JahangiriNo ratings yet
- 016-7100-039-A - Raven RCM Installation Manual - Retrofit Conversion From AragDocument24 pages016-7100-039-A - Raven RCM Installation Manual - Retrofit Conversion From AragAlex RosaNo ratings yet
- SCU 8 - Instruction Manual - Ed. 3008Document114 pagesSCU 8 - Instruction Manual - Ed. 3008Centrifugal SeparatorNo ratings yet
- M008E IM Eng V3.2Document34 pagesM008E IM Eng V3.2Ganjar Septian100% (1)
- Model: LUGB: Vortex Flow MeterDocument27 pagesModel: LUGB: Vortex Flow MetertiagoNo ratings yet
- TLG THG Operating ManualDocument10 pagesTLG THG Operating ManualnazimsaatNo ratings yet
- NVR-9000 Service Manual 20181227 - V6.0Document70 pagesNVR-9000 Service Manual 20181227 - V6.0Mahfooz Ali100% (2)
- 016-5033-017-B - TC1 Installation Manual For Challenger MT7XX and MT8XX C-D-EDocument28 pages016-5033-017-B - TC1 Installation Manual For Challenger MT7XX and MT8XX C-D-Ecelio albuquerqueNo ratings yet
- Auma Sqrex 05-2Document48 pagesAuma Sqrex 05-2Valentin AndreiNo ratings yet
- TK 61110-4-OP Magnum+ Operators Manual Rev.0 11-13 enDocument40 pagesTK 61110-4-OP Magnum+ Operators Manual Rev.0 11-13 enVERDADE MUNDIAL GUERRANo ratings yet
- Dsa 20 User Manual (17220)Document36 pagesDsa 20 User Manual (17220)Godfrey Fermin Joven YustresNo ratings yet
- 2769 Portable Double Bridge: User's ManualDocument21 pages2769 Portable Double Bridge: User's Manualhafidz bandungNo ratings yet
- Spectrumlab 752sDocument22 pagesSpectrumlab 752sSarah Marie ArquizaNo ratings yet
- sc60 Operators Manual U2 8604Document108 pagessc60 Operators Manual U2 8604rodrigosilva1973No ratings yet
- AT 020 Applanation Tonometer: User ManualDocument25 pagesAT 020 Applanation Tonometer: User ManualEugenNo ratings yet
- FCV585 FCV620 Operator's Manual eDocument56 pagesFCV585 FCV620 Operator's Manual eTran_Manh_Trun_7237No ratings yet
- K-TRON Digi DriveDocument48 pagesK-TRON Digi DriveIvan100% (1)
- SDS1000DLplus&CMLplus UserManual UM0101A-E01ADocument126 pagesSDS1000DLplus&CMLplus UserManual UM0101A-E01AWiwy TransmitNo ratings yet
- Vario DG: Operating InstructionsDocument16 pagesVario DG: Operating InstructionsMohamed MohamedNo ratings yet
- Im01t01b04-01e 003Document20 pagesIm01t01b04-01e 003Bryan NavarreteNo ratings yet
- Control Elevador Zetadyn 1dvDocument62 pagesControl Elevador Zetadyn 1dvoro plataNo ratings yet
- Ultrasonic Flowmeter Instruction Manual Model: SL1188Document82 pagesUltrasonic Flowmeter Instruction Manual Model: SL1188Edward Quispe CervantesNo ratings yet
- Apelem Kristal X-Ray Table - User Manual PDFDocument42 pagesApelem Kristal X-Ray Table - User Manual PDFArish MalikNo ratings yet
- Conveyor Systems Maintenance Manual XS, XL, XM, XH, XK, XBDocument43 pagesConveyor Systems Maintenance Manual XS, XL, XM, XH, XK, XBTamal Tanu RoyNo ratings yet
- 3300/15 Dual Vibration Monitor: Operation ManualDocument25 pages3300/15 Dual Vibration Monitor: Operation ManualLinh LyNo ratings yet
- 3300 20 Operation Manual 80178-01 Rev FDocument24 pages3300 20 Operation Manual 80178-01 Rev FAhmad Saad Gahwagi100% (1)
- S220LC-V ShopDocument570 pagesS220LC-V ShopTeten Ahmadona100% (1)
- Elcometer NDT Vg10 Ultrasonic Velocity Gauge Instruction ManualDocument27 pagesElcometer NDT Vg10 Ultrasonic Velocity Gauge Instruction ManualAnonymous lSEnEklZ7No ratings yet
- RXF IM Ed04Document66 pagesRXF IM Ed04Marius ClavacNo ratings yet
- Guard Presence SensingDocument11 pagesGuard Presence SensingVelmurugan ElumalaiNo ratings yet
- 016-5034-312-A - RS1 Installation Manual For John Deere 7J AutoTrac-ReadyDocument30 pages016-5034-312-A - RS1 Installation Manual For John Deere 7J AutoTrac-ReadyMarcos ParedesNo ratings yet
- Innolux tw230fDocument37 pagesInnolux tw230fMichael QuerubinNo ratings yet
- Futaba 2er EngDocument18 pagesFutaba 2er Engsoporte7711No ratings yet
- Icot 5000 PosicionadorDocument39 pagesIcot 5000 PosicionadorLuis Humberto Ruiz BetanzosNo ratings yet
- MJ 2635 Eriez Chip Parts Conveyor IOMDocument20 pagesMJ 2635 Eriez Chip Parts Conveyor IOMSuyapa Lainez LainezNo ratings yet
- T19 0扶梯电气随机文件(默纳克一体机)(英文)Document83 pagesT19 0扶梯电气随机文件(默纳克一体机)(英文)Tora BorgaNo ratings yet
- 4.8 - MD-SX Instruction (1309)Document56 pages4.8 - MD-SX Instruction (1309)jarekNo ratings yet
- 9549 - MARS 6 User ManualDocument26 pages9549 - MARS 6 User Manualemrenj100% (1)
- E5118 Sre1-4Document4 pagesE5118 Sre1-4Ravi Kishore BNo ratings yet
- A Picture Is Worth A Thousand Words: The New Challenges of Remote Vibration AnalysisDocument9 pagesA Picture Is Worth A Thousand Words: The New Challenges of Remote Vibration AnalysisRavi Kishore BNo ratings yet
- Transient Testing With Emerson's 2140 On Silo AC FansDocument5 pagesTransient Testing With Emerson's 2140 On Silo AC FansSAGI RATHNA PRASAD me14d210No ratings yet
- Single Flank TestingDocument4 pagesSingle Flank TestingSanjay Mehrishi100% (1)
- Bently Nevada Wind Renewables Adapt Brochure 2018Document8 pagesBently Nevada Wind Renewables Adapt Brochure 2018zeroseyaNo ratings yet
- Damping in BearingDocument4 pagesDamping in BearingRavi Kishore BNo ratings yet
- Mobile Phones and RadiationDocument6 pagesMobile Phones and RadiationGehanShabanNo ratings yet
- Machine Foundations On PilesDocument14 pagesMachine Foundations On PilesLingeswarran NumbikannuNo ratings yet
- (Phase-04) Test Planner-Repeater Course - 2022-23 - FTDocument1 page(Phase-04) Test Planner-Repeater Course - 2022-23 - FTDonvito CannoliNo ratings yet
- Liquefaction Potential Based On Swedish Weight Sounding Test in Langaleso Village Sigy RegencyDocument8 pagesLiquefaction Potential Based On Swedish Weight Sounding Test in Langaleso Village Sigy RegencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Industrial Accidents in Cement Industries of Nepal: Submitted ToDocument58 pagesIndustrial Accidents in Cement Industries of Nepal: Submitted ToSushma Karn100% (1)
- Morph Elegant Powerpoint TemplateDocument6 pagesMorph Elegant Powerpoint TemplateAl FaritsiNo ratings yet
- NDT Question and AnswerDocument11 pagesNDT Question and AnswerNina Aziz100% (1)
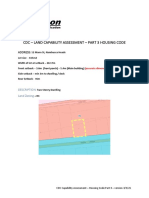
- CDC - Land Capability Assessment - Part 3 Housing Code: AddressDocument5 pagesCDC - Land Capability Assessment - Part 3 Housing Code: AddressDanny NguyenNo ratings yet
- Material Specification For Preformed Plastic Pavement Marking TapeDocument10 pagesMaterial Specification For Preformed Plastic Pavement Marking TapeTony ParkNo ratings yet
- KWK Data Sheet 2021 02Document7 pagesKWK Data Sheet 2021 02Anas RaisNo ratings yet
- Sociology As A Branch of KnowledgeDocument19 pagesSociology As A Branch of KnowledgeRaju AhmmedNo ratings yet
- F3 Math Ch1A Linear Inequalities in One UnknownDocument8 pagesF3 Math Ch1A Linear Inequalities in One Unknown何俊昇No ratings yet
- Basal Energy ExpenditureDocument1 pageBasal Energy ExpenditureSucipto HartonoNo ratings yet
- Essentialism vs. Social Constructionism in The Study of Human Sexuality (1998) - DeLamater & Hyde PDFDocument10 pagesEssentialism vs. Social Constructionism in The Study of Human Sexuality (1998) - DeLamater & Hyde PDFKhoa LeNo ratings yet
- Heating and Cooling With Ground-Source Heat Pumps in Moderate and Cold Climates, Two-Volume Set 1Document397 pagesHeating and Cooling With Ground-Source Heat Pumps in Moderate and Cold Climates, Two-Volume Set 1Pavan Kalyan0% (1)
- 2019 Second Semester Semi-Annual ReportDocument48 pages2019 Second Semester Semi-Annual ReportEdsel Alfred OtaoNo ratings yet
- Quarter 3 - Module 1 Writing and Composition: Department of Education Republic of The PhilippinesDocument28 pagesQuarter 3 - Module 1 Writing and Composition: Department of Education Republic of The PhilippinesEditha FernandezNo ratings yet
- CAT 2021 Question Paper (Slot 2) by CrackuDocument79 pagesCAT 2021 Question Paper (Slot 2) by CrackuiamcoolashutoshNo ratings yet
- OSH Quiz Tutorial Openbook TestDocument12 pagesOSH Quiz Tutorial Openbook TestFunny tinny08No ratings yet
- Megger MIT515 s.n101405643Document3 pagesMegger MIT515 s.n101405643Magicneering PredictNo ratings yet
- Date: - : Parent Consent SlipDocument2 pagesDate: - : Parent Consent SlipHero MirasolNo ratings yet
- Verbal and Nonverbal CommunicationL2Document10 pagesVerbal and Nonverbal CommunicationL2margilyn ramosNo ratings yet
- Block 7Document113 pagesBlock 7KK ArticlesNo ratings yet
- 3.4 Analytical Exposition and 3.5 Passive Voice - SELF EALUATION 3.4 Analytical ExpositionDocument2 pages3.4 Analytical Exposition and 3.5 Passive Voice - SELF EALUATION 3.4 Analytical Expositionsugar gliderNo ratings yet
- The History of Remote SensingDocument5 pagesThe History of Remote Sensingankan mohantyNo ratings yet
- Birches - ExplanationDocument12 pagesBirches - ExplanationSharmila DasNo ratings yet
- Lesson From Seveso ItalyDocument48 pagesLesson From Seveso ItalyBilal ZamanNo ratings yet
- Agathias The HistoriesDocument101 pagesAgathias The HistoriesFrançois88% (24)
- Day 02 ESP Basic Design and Operational FactorsDocument113 pagesDay 02 ESP Basic Design and Operational FactorsMustafa Abdel-WahabNo ratings yet
- Transition Temperatures and Enthalpies of Fusion and Crystallization of Polymers by Differential Scanning CalorimetryDocument8 pagesTransition Temperatures and Enthalpies of Fusion and Crystallization of Polymers by Differential Scanning CalorimetryRubén Darío Vera LópezNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- Heat Transfer Engineering: Fundamentals and TechniquesFrom EverandHeat Transfer Engineering: Fundamentals and TechniquesRating: 4 out of 5 stars4/5 (1)
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Photovoltaic Solar Energy: From Fundamentals to ApplicationsFrom EverandPhotovoltaic Solar Energy: From Fundamentals to ApplicationsNo ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- An Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksFrom EverandAn Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksNo ratings yet
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)