Professional Documents
Culture Documents
500W High Efficiency Switched-Tank Converter (STC) Reference Design Based On STNRG328S and STPRDC02A For 54V Bus Conversion in Server Application
Uploaded by
GanapathiOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
500W High Efficiency Switched-Tank Converter (STC) Reference Design Based On STNRG328S and STPRDC02A For 54V Bus Conversion in Server Application
Uploaded by
GanapathiCopyright:
Available Formats
AN5810
Application note
500W high efficiency switched-tank converter (STC) reference design based on
STNRG328S and STPRDC02A for 54V bus conversion in server application
Introduction
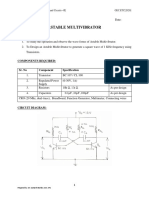
This application note describes the 54 V input, 13.5 V unregulated output (54 V divided by 4), 500 W, 98% efficient, switched-
tank converter based on the STNRG328S digital controller and four STPRDC02A full bridge MOSFET drivers tailored to a
typical 12 V bus generation in computer and server applications.
The STC is an open loop resonant converter that performs a power conversion from an input voltage to an output voltage with
a fixed duty cycle. The zero current detection feature allows synchronization with the real resonant LC frequently in case of full
X7R capacitors used.
The power section scheme is composed of an LC resonant network, flying MOSFETs and rectification MOSFETs driven by four
STPRDC02A full bridge MOSFET drivers with ZCD.
The STNRG328S is a “State Machine Event Driven” (SMED) digital controller and it implements the STC control strategy and
the necessary functions. Various control actions are required to ensure the proper architecture behavior and best performances
with ZCD (Zero Current Detection).
Additional components have been used to implement the functions controlled by the SMED digital engine (drivers, hot swap,
charge pump, etc.). Populating passive power components only on the top side for 500 W, instead of both sides for 1 KW.
Figure 1. 500W, ⅛ brick STC converter
AN5810 - Rev 1 - February 2023 www.st.com
For further information contact your local STMicroelectronics sales office.
AN5810
Main features and circuit description
1 Main features and circuit description
Table 1. Main features
Parameter Value
From 40V up to 60V – Typical operative range: 54V
Input range
Absolute maximum rating = 62V
Output voltage 13.5V at 45A, ~ 600W continues, 900Wpk operation at 54V input
Peak efficiency 98% at 54V input
Efficiency
Max. load efficiency 97.4% at 54V input
Typ. operative switching frequency Variable within 140kHz to 300kHz
1.4” x 2.3” (4 to 1 conversion evaluation board)
Dimensions
0.8” x 2” x 0.5 (active area)
PCB 10 layers (2 oz)
The STC principle schematic is shown in Figure 2.
In first approximation, the circuit operates with just one PWM signal:
• TON phase: RED FETs are ON and BLUE FETs are OFF (Figure 3)
• TOUT phase: RED FETs are OFF and BLUE FETs are ON (Figure 4)
To better understand the STC functionality, as a first step let us consider L = 0 and Iout = 0. In this case, the STC
behaves like a Charge Pump and the capacitors behave like a voltage generator → C ≈ Voltage Generator, see
Figure 5.
The relation between VIN and VOUT is obtained solving the equations that describe the circuit in Figure 5 (L = 0
and IOUT = 0):
V
Vout = 4in (1)
The inductors L1 and L2 are required to create the resonance and to allow the commutation of the FETs at
Zero Current (ZCS). The ZCS is guaranteed if the switching frequency of the STC is equal to the LC resonance
frequency.
FSWnom = 1 (2)
2 π Lres ∙ Cres + Tdead
Using U2J capacitors the CF>>CR (CR = Cres)
Figure 2. STC principle schematic
AN5810 - Rev 1 page 2/45
AN5810
Main features and circuit description
Figure 3. Ton phase
IOUT = IL1+ IL2
Figure 4. TOFF phase
IOUT = IL1+ IL2
Figure 5. STC concept
The output current is the sum of the current in the inductors L1 and L2 as shown in Figure 3 and in Figure 4.
Therefore, the peak current in the inductors is:
I
IL_peak = out π
2 ∙2 (3)
To avoid instability, condition the saturation current in the inductor must be higher than the maximum inductor
peak current:
IL_sat ≫ IL i . e . IL > 1.3 ∙ IL_peak (4)
peak sat
About the resonant capacitor, the maximum peak voltage on C3 must be lower than the minimum VOUT to avoid
negative nodes:
IL_peak LRES
VC_peak =
ω ∙ CRES = IL_peak ∙ CRES < Voutmin
(5)
AN5810 - Rev 1 page 3/45
AN5810
Main features and circuit description
Instead of using U2J, this rev 2 of demo focuses on X7R capacitor and the above rules change. CF and CR are
comparable and the total capacitance is the parallel of CF and CR . STC configurations tested reported in Table 2.
Table 2. STC tested configurations
POUT fsw CIN CRES LRES Creservior
1Res : 10 * 4.7uF _50V
GRM31CR71H475KA1
2L
12 *10uF _100V Double
8*0.47µH/ 12* 10uF_50V
Variable GRM32EC72A106KE0 phase25.92µF@54V inductor
GRM32ER71H106KA1
5L 33.85µF@40V 56nH per phase @ 2L
600W 140kHz
33.6uF@54V 600W
280Khz 72.8uF @54V
2 Res: 13 * 4.7uF _25V
46.2uF@40V or double 56nH/phase
88.2uF @40V
TMK212AB7475KG @ 1KW
19.8uF@54V
25.2uF@40V
Figure 6 and Figure 7 show STC simulations in case of POUT = 500W and VIN = 54V.
Figure 6. STC simulation POUT = 500 W and VIN = 54 V → main STC nodes
AN5810 - Rev 1 page 4/45
AN5810
Main features and circuit description
Figure 7. STC simulation POUT = 500 W and VIN = 54 V → C voltage & L current
The resonant current is always null at the end of every cycle, thanks to the ZCD information from the driver
STPRDC02A, the controller STNRG algorithm adjusts the switching frequency and the deadtime according to
both branches, allowing the MOSFETs to commutate in zero current switching mode.
At light load the ZCD logic is blind due to lack of current information, but above 10 A the loop starts working and
the switching freq is lowered and the deadtime is shorted.
X7R capacitors vary more than 40% with bias voltage/temperature and inductor accuracy is around 10%; the
STNRG controller modifies the Switching Freq and deadtime accordingly and in real-time.
AN5810 - Rev 1 page 5/45
AN5810
STC power section & drivers
2 STC power section & drivers
ICs STC power section is managed by four STPRDC02A that provide high current driving for the Flying MOSFETs
(Q1, Q2, Q3 and Q4 in Figure 2) and Rectification MOSFETs (Q5, Q6, Q7, Q8, Q9 and Q10 in Figure 2) as
well as input current monitoring and protection. Floating drivers are needed for the flying MOSFETs while ground
referred drivers are needed for the rectification MOSFETs.
The STPRDC02A is a 75 V, high voltage, full bridge MOSFET driver IC. It provides four high current gate drive
outputs, each capable of driving one or more N-channel power MOSFETs.
The device features programmable deadtime control to optimize MOSFETs switching losses, so optimizing the
overall efficiency. Translating the ZVD parasitic diode information on the X driver side to a logic information by
ZVCX_OUT pin 13 (on previous driver was called FAULT pin) allows HIZ management by the EN driver pin during
the deadtime period.
Based on Config pin level, the two PWM inputs control the two half-bridge sections independently. The driver EN
pin, when low, forces all the gate drive to low regardless of the PWMs status implementing a HiZ. This is used
in deadtime. The driver also allowed to detect ZCD in the resonant component. The ZCD information is useful for
the STNRG328S frequency management.
Figure 8. Rectification MOSFETs driver section
AN5810 - Rev 1 page 6/45
AN5810
STC power section & drivers
Figure 9. Floating MOSFETs driver section
AN5810 - Rev 1 page 7/45
AN5810
STC digital control engine
3 STC digital control engine
The STNRG328S, a “State Machine Event Driven” (SMED) digital architecture (see Figure 2), is used to
implement the STC control strategy and the necessary functions. Some key control features are required to
perform an efficient and reliable power conversion function. The most important feature set is summarized below:
• Initial set-up
• Current limit in combination with hot swap controller
• Operating input voltage window
• Conversion ration control
• PWM frequency and deadtime management to guarantee ZCD
• Soft-start control
• Driver section
• Temperature control
Figure 10. SMED digital engine STNRG328S block diagram
The STNRG328S can be programmed by SWIM bus (IAR debugger) or just using a UART bus to download the
firmware (refer to STNRG328S Upgrade Firmware Procedure). PMBUs is only used for telemetry and parameter
tuning.
AN5810 - Rev 1 page 8/45
AN5810
STC digital control engine
Table 3. Pin12 cpp0
Pin12 Cpp0 allows to configure initial setting: Ratio/Freq:
Config. Board Ratio V_CPP0 Freq.SW (kHz)
0 STC 4:1 41mV ZCD
1 STC 3:1 123mV ZCD
2 STC 2:1 205mV ZCD
3 STC 2:1 287mV 330
4 STC 2:1 369mV 360
5 STC 3:1 451mV 330
6 STC 4:1 533mV 330
7 STC 4:1 615mV 360
8 HSTC 4:1 697mV 390
9 HSTC 4:1 779mV 180
10 HSTC 5:1 861mV 200
11 HSTC 5:1 943mV 500
12 HSTC 6:1 1025mV 180
13 HSTC 8:1 1107mV 180
14 HSTC 10:1 1189mV 180
Table 4. Resistors setting for cpp0 configurations
Config. board Ratio Rup Rdown VCppo,PART,CALC
0 4:1 - - -
1 3:1 145K 11K 126,9mV
2 2:1 91K 12K 209,7mV
3 2:1 54K 10K 281mV
4 2:1 77K 20K 371mV
5 3:1 300K 100K 450mV
6 4:1 210K 90K 540mV
7 4:1 200K 100K 599mV
8 4:1 150K 697mV 724mV
9 4:1 130K 100K 782,6mV
10 5:1 110K 100K 857mV
11 5:1 91K 100K 942mV
12 6:1 75K 100K 1028mV
13 8:1 62K 100K 1111mV
14 10:1 51K1 100K 1191mV
For setting a different configuration than 4:1 with ZCD, it is enough to change the default pull-down resistor value
RdwOut at Vout resistor divider, and to never change the input resistors divider that is tuned for accurate input
voltage telemetry reading.
AN5810 - Rev 1 page 9/45
AN5810
STC digital control engine
Table 5. Ration & RdwOut 1
Ratio Rdonw
2:1 650 Ω
3:1 950 Ω
4:1 1200 Ω
5:1 1500 Ω
6:1 1700 Ω
8:1 2500 Ω
10:1 3500 Ω
Figure 11. Ration & RdwOut 2
STC supervisory state machine implemented by firmware in the main loop is reported below in Figure 12.
AN5810 - Rev 1 page 10/45
AN5810
STC digital control engine
Figure 12. STC state machine
Elapsed WAIT_TIME
PWR UP (100msec)? No
POWER_UP Acquisition ADC Stable
Acquisition DIGIN0
Stabilization Vin Yes
Initialization ST INIT F switching
Peripheral ST_WAIT
I2C bus PWR UP
Ratio
DIGIN0 HIGH? No
DIGIN0 HIGH? No
ST_CHN
PWR UP
ST_OFF Yes
DIGIN0 HIGH?
DIGIN0 HIGH? Yes
Vout HOTSWAP Record and Clear UVP,OVP,OCP, Thermal flags
< 10V? Yes
Disable PWM0
DIGIN0 LOW? Yes
& PMW01 DIGIN0 LOW
or UVP or OVP or OCP or HS OC or
thermal ?
Yes Vin > or = 60V?
Disable
HOT SWAP Yes
ST_Vin ST_Vin Vin < 44V?
No ST_SHUT OUT OF START UP
DOWN RANGE No
Vin < or =58V?
DIGIN0 LOW? Yes
DIGIN0 LOW Yes
Vin >60V? (Vin > or =
or UVP or OVP Vin < or =58V?
Yes 44V) ? Yes
PWM01 or OCP or HS Yes
Yes Disable
Disable OC or thermal ? Enable ST_VOUT Check HS and
HOT SWAP
Vin<10V? Disable SMED 4&5 HOT SWAP START UP Enable PWM0
Disable HOT SWAP & PMW1
Yes
Vin < 40V?
Yes Vout > or = 2V? No
Disable SMED 4&5
ST_ON
& Disable HOT SWAP
ST_UVLO ZCD (Vout < 2V) ? Yes
Vin > or = 48V ?
No Enable SMED 4&5 & Enable HOT SWAP
DIGIN0 LOW
Vin > or = 44V ? 1
or UVP or OVP or OCP , HS OC ,
Yes
thermal P ? No
Enable HS
1. Current limit
– Current limit provides the protection to the circuit during normal operations and during potential
overload of the output. An upstream hot swap device drives the digital engine. The hot swap has
the function to disconnect the input from the STC block in the event of an overload, thus protecting
the downstream circuitry. A current limit function for the 1 kW brick is based either on the inductor
DCR (for the LTC7801), or the on-resistance of the STEF48H, depending on evaluation version. The
STNRG keeps hot swap in latched condition.
2. Operating input voltage window
– STC input voltage (40 V to 60 V) has to be constantly monitored to ensure that the unregulated
output voltage is between the desired values. If input voltage falls outside the predefined boundaries,
the STC system is disconnected from the input voltage bus through the hot swap device.
3. VIN/VOUT ratio control
– Conversion ratio control: since the systems works on a fixed VIN/VOUT ratio, defined by the
hardware structure (that is, the number of C-L/C legs implemented) an accurate control of this ratio is
necessary to ensure that the output voltage is not deviating from the target value. If this happens, the
activity is suspended, the hot swap is opened and a fault signal is asserted.
4. PWM frequency control
– In ST_ON state, the accuracy of the PWM frequency is an important parameter to ensure the
matching with the LC resonant tank and thus an optimum efficiency performance and VOUT control.
This feature is implemented through an adaptive control strategy. PWM frequency and deadtime is
programmed by PMBus® setting the minimum and maximum range to ensure a good resonance
in the LC resonant tank, in ZCD setting the min. and max. freqency and deadtime are reported in
Table 6.
AN5810 - Rev 1 page 11/45
AN5810
STC digital control engine
5. Temperature control
– Temperature control is an important variable to monitor due to the application high power density
(~200W/in2) and the power flowing through the STC structure. Components’ temperature could rise
in case of overload.
The STNRG328S could also monitor 2 NTC temperature sensing points by adding a dual selector
(74LVC2G14GV) driven by pin 6 and ADC0 is the only one to read both the NTCs at different period
(few Sec).
Table 6. PWM frequency control
# Vin Vin_Entry Vin_Exit FREQ_min FREQ_max DEAD_Time_min DEAD_Time_max
0 41 39.5 42.5 0x0067 0x00E4 0x0004 0x001E
1 42 40.5 43.5 0x006A 0x00E7 0x0003 0x001E
2 43 41.5 44.5 0x006D 0x00EA 0x0004 0x001D
3 44 42.5 45.5 0x0071 0x00ED 0x0003 0x001D
4 45 43.5 46.5 0x0074 0x00F1 0x0004 0x001C
5 46 44.5 47.5 0x0077 0x00F4 0x0003 0x001C
6 47 45.5 48.5 0x007A 0x00F7 0x0004 0x001B
7 48 46.5 49.5 0x007D 0x00FA 0x0003 0x001B
8 49 47.5 50.5 0x0081 0x00FD 0x0004 0x001B
9 50 48.5 51.5 0x0084 0x0101 0x0003 0x001A
10 51 49.5 52.5 0x0087 0x0104 0x0004 0x001A
11 52 50.5 53.5 0x008A 0x0107 0x0003 0x001A
12 53 51.5 54.5 0x008D 0x010A 0x0004 0x0019
13 54 52.5 55.5 0x0091 0x010D 0x0003 0x0019
14 55 53.5 56.5 0x0094 0x0111 0x0004 0x0019
15 56 54.5 57.5 0x0097 0x0114 0x0003 0x0018
16 57 55.5 58.5 0x009A 0x0117 0x0004 0x0018
17 58 56.5 59.5 0x009D 0x011A 0x0003 0x0018
18 59 57.5 60.5 0x009D 0x011A 0x0004 0x0018
AN5810 - Rev 1 page 12/45
AN5810
STC digital control engine
Figure 13. Digital engine STNRG328S section
AN5810 - Rev 1 page 13/45
AN5810
Hot swap
3.1 Hot swap
The hot swap function using an input buck regulator is shown in Figures 14 and 15.
The input buck regulator acts as an eFuse (electronic fuse) limiting the inrush current and the output voltage slew
rate for a smooth soft-start of STC output voltage.
The STC is a very fast converter and requires a smooth input voltage edge to avoid huge inrush current.
The STNRG controller controls the hot swap enable pin to manage the power ON and OFF sequence.
Two options for a hot swap solution have been evaluated (TI and LTC):
Figure 14. Input section A
TI _Hot swap
Figure 15. Input section B
LTC ( dcdc with 100% duty)
AN5810 - Rev 1 page 14/45
AN5810
Auxiliary power
3.2 Auxiliary power
The connection of external voltage sources 5 V is required before the application of the input voltage.
After the output voltage ramps, PM6644 rises 5 V to 7 V for efficiency improvement and for bigger MOSFET
commutation (if needed) and thus the external 5 V current drops to zero. The VDRIVER is the output of ext. 5 V
and PM6644 OR’diode. The other 3.3 V rail required to supply STNRGs is generated by an LDO (LDK220) from
VDRIVER.
3.3 Startup sequence
Apply 5 V and 3.3 V prior to input voltage. The STNRG328S wakes up and as soon as the STC enable signal
(STC EN) arrives, it enables the soft-start of the input buck and turns on the STC. The STC output voltage
follows the soft-start of the input buck output as shown in Figure 18. During the soft-start, the ZCD algorithm
starts working in order to synchronize the external resonant LC with its own internal logic starting from the max.
frequency allowed. Upon the end of STC output voltage ramping, PGOOD is asserted within several mS.
Note: 1
PGOOD signal is pulled up through a resistor divider ( 4.3 ) from the VOUT. Therefore, its high voltage level is:
VOUT
4.3 (6)
Table 7. PGOOD
Min. Type Max.
NAME
(VIN = 40V) (VIN = 54V) (VIN = 60V)
PGOOD high level 2.3V 3.1V 3.5V
Prior to applying an input voltage VIN to the evaluation board, external voltages 5 V and 3.3 V are highly
recommended to connect first, as illustrated in Figure 18.
AN5810 - Rev 1 page 15/45
AN5810
Design guidelines with special focus on the inductor and capacitor selections
Figure 16. Startup sequence with EN STC asserted after VIN
3.4 Design guidelines with special focus on the inductor and capacitor selections
A good inductor and capacitor selection is fundamental to maintain system performances (efficiency and power
delivery).
The flying (CF) can be a Class II (X7R) capacitor since it works like a DC voltage source with minimum AC
voltage ripple. In this case, the higher tolerance of the Class II does not affect the performance of the STC due to
frequency variation thank to the ZCD feature.
The rules for the X7R capacitor selection are:
1. To match the total Cap required for matching the resonant Freq in all 4 resonant periods.
2. To consider the variation of capacitance at different Input voltage.
3. To choose adequate breakdown voltage of capacitors (each branch has different voltage applied).
4. To verify the total RMS current of each current path based on the output current.
5. To select capacitors with very low ESR (few mOhm max.).
AN5810 - Rev 1 page 16/45
AN5810
Design guidelines with special focus on the inductor and capacitor selections
Table 8. Suggested pin to pin capacitors part numbers
Name Nbr Part nbr
1 Murata GRM31CR71H475KA12L
Cres 1 2 Samsung CL31B475KBHN3NE
3 TDK C3216X7R1H475K160AC
1 Murata GRM32ER71H106KA12L
Creservior 2 TDK CNA6P1X7R1H106K250AE
3 AVX 12105C106KAT2A
1 Samsung CL21B225KAFNNNF
2 AVX 08053C225KAT2A
Cres 2
3 Taiyo Yuden TMK212AB7475KG
4 (7uF)
1 Murata GRM32EC72A106KE05
2 Taiyo Yuden HMK325C7475KM-PE
Cin
4 (7uF)
2 Samsung CL32B475KCVZ3WE (4uF)
Spreadsheet used for 500 W design
Table 9. Equivalent resonant capacitances
Typ.val Quantit Tot Tot C Tot C
Name 54V 48V 40V A each Tot 54V
ue y current 48V 40V
Cres 1 4.7 1.62 2.116 10 3.42 34.2 16.2 21.16
Creservior 10 5.2 6.3 12 5 60 62.4 75.6
Cres 2 2.2 1.1 1.4 13 3 39 14.3 18.2
Cin 10 2.4 3.3 12 4 48 28.8 39.6
C equivalent 54 V 48 40
12.643 16.698
Cres 1A
9 6
14.668
Cres 2A 11.6339
7
16.532
Cres 1B 12.8611
6
Cres 2B 14.3 18.2
2.14E+
Fres_res1 =
05
2.04E+
Freq_res2 =
05
While the characteristic of the resonant inductor LR must be flat up to 1.3 times the maximum current
(ISAT> 1.3*IL_peak):
I
IL_peak = out π
2 ∙2 (7)
AN5810 - Rev 1 page 17/45
AN5810
Power losses and efficiency
Another important challenge for the LR is to reach the lowest Rac and to minimize core losses. In order to
minimize the power dissipated into the magnetic core, design consideration for balance between the equivalent
area and flux density (number of turns) is required.
Simulation and experimental results show that a 10% resonant inductor variation and 30% resonant capacitor
variation affects the STC efficiency less than 0.2%.
Figure 17. Inductors selection
With respect to the MOSFET selections in the 4:1 STC application note design, the Flying MOSFETs are rated at
twice the output voltage (2*VOUT) and the Rectification MOSFETs are rated at the output voltage (VOUT). Thus,
40 V MOSFETs and 25 V MOSFETS for the Flying and Rectification MOSFETs, respectively, fit the criteria. These
MOSFET selections, by design via the optimum Figure of Merit (FoM), to achieve high efficiency and thus highest
achievable power density possible. To enable a “completely autonomous STC design”, simulation tools, SIMPLIS
Technologies and Microsoft Excel, are available upon request.
3.5 Power losses and efficiency
Figure 19 and Figure 20 show a calculation of the power losses and of the efficiency without bias (Figure 19 : VIN
= 54 V and Pout = 500 W, Figure 20 : VIN = 54 V and POUT = 1 kW) using the Microsoft Excel Design file.
Power losses and efficiency calculation (POUT = 500 W)
AN5810 - Rev 1 page 18/45
AN5810
Power losses and efficiency
Figure 18. Power losses and efficiency calculations (POUT = 500 W)
POWER LOSS STC
Vin [V] = 5.40E+01 STC Input Volatge
Lr [H] = 7.80E-08 Resonance Inductor
Cr [F] = 1.20E-05 Resonance Capacitor
Vout [V] = 1.35E+01 STC Output Voltage
fsw [Hz] = 1.80E+05 STC Switching Frequency
Tdead [sec] = 1.00E-07 Driver dead time
Duty = 9.64E-01 Duty cicle ( =( −2∗ )/ )
Pout [W] = 5.00E+02 Output Power
Iout [A] = 3.70E+01 STC Output Current
Power Loss SR FETs (Infineon 25V - 40A)
Vdrv[V] = 6.00E+00 Gate Driver Voltage
RDSON [Ω] = 1.30E-03 Drain Source ON resistance
Coss [F] = 1.20E-09 Coss=Cds+Cgd
Qg [C] = 1.60E-08 Gate Charge
Vds [V] = 1.35E+01 Drain Source OFF Voltage
SR FETs # = 6.00E+00 Numebr of SR FETs
PdrvSR [W] = 0.02 Driver Power Loss = ∗ ∗
2
∗ ∗
PCossSR [W] = 0.03 Coss Power Loss =
1.5
2
PcondSR [W] = 0.27 Conduction Power Loss = ∗ ∗
4 ∗2
P totSR [W] = 1.97 Total SR FETs Power Loss =# ∗ / + +
P totSR [%] = 22.36 Total SR FETs Power Loss %
Power Loss Fly FETs (Infineon 40V - 40A)
Vdrv[V] = 5.00E+00 Gate Driver Voltage
RDSON [Ω] = 2.40E-03 Drain Source ON resistance
Coss [F] = 7.50E-10 Coss=Cds+Cgd
Qg [C] = 2.00E-08 Gate Charge
Vds [V] = 2.70E+01 Drain Source OFF Voltage
Fly FETs # = 4.00E+00 Numebr of Fly FETs
PdrvFLY [W] = 0.02 Driver Power Loss = ∗ ∗
2
∗ ∗
PCossFLY [W] = 0.07 Coss Power Loss =
1.5
2
PcondFLY [W] = 0.51 Conduction Power Loss = ∗ ∗
4 ∗2
P totFLY [W] = 2.44 Total FLY FETs Power Loss =# ∗ / + +
P totFLY [%] = 27.67 Total FLY FETs Power Loss %
Power Loss L and C parasitic R
CESR[Ω] = 2.00E-04 Resonance Capacitor ESR
LRcore [Ω] = 1.00E-03 Resonance Inductor Rcore
LRac [Ω] = 3.00E-03 Resonance Inductor Rac
2
P Cesr [W] = 0.26 Resonance Capacitor ESR Power Loss =3∗ ∗ ∗
4∗ 2
P Cesr [%] = 2.98 Resonance Capacitor ESR Power Loss %
2
/ 16
P Lr [W] = 3.51 Resonance Inductor Power Loss = + ∗ 2
∗
P Lr [%] = 39.79 Resonance Inductor Power Loss %
PCB Power Loss
RPCB[Ω] = 3.00E-03 PCB resistance
2
P PCB [W] = 0.63 PCB resistance Power Loss = ∗ ∗
4 ∗2
P PCB [%] = 7.19 PCB resistance Power Loss %
P STCtot[W] 8.81 Total STC Power Loss = + + + +
∗
Efficiency [%] 98.27 Efficiency η=
∗ +
AN5810 - Rev 1 page 19/45
AN5810
Power losses and efficiency
Figure 19. Power losses and efficiency calculation (POUT = 1 kW)
POWER LOSS STC
Vin [V] = 5.40E+01 STC Input Volatge
Lr [H] = 3.90E-08 Resonance Inductor
Cr [F] = 2.00E-05 Resonance Capacitor
Vout [V] = 1.35E+01 STC Output Voltage
fsw [Hz] = 1.90E+05 STC Switching Frequency
Tdead [sec] = 1.00E-07 Driver dead time
Duty = 9.62E-01 Duty cicle ( =( −2∗ )/ )
Pout [W] = 1.00E+03 Output Power
Iout [A] = 7.41E+01 STC Output Current
Power Loss SR FETs (Infineon 25V - 40A)
Vdrv[V] = 6.00E+00 Gate Driver Voltage
RDSON [Ω] = 7.00E-04 Drain Source ON resistance
Coss [F] = 1.20E-09 Coss=Cds+Cgd
Qg [C] = 1.60E-08 Gate Charge
Vds [V] = 1.35E+01 Drain Source OFF Voltage
SR FETs # = 1.20E+01 Numebr of SR FETs
PdrvSR [W] = 0.02 Driver Power Loss = ∗ ∗
2
∗ ∗
PCossSR [W] = 0.03 Coss Power Loss =
1.5
2
PcondSR [W] = 0.59 Conduction Power Loss = ∗ ∗
4 ∗2
P totSR [W] = 7.93 Total SR FETs Power Loss =# ∗ / + +
P totSR [%] = 25.26 Total SR FETs Power Loss %
Power Loss Fly FETs (Infineon 40V - 40A)
Vdrv[V] = 5.00E+00 Gate Driver Voltage
RDSON [Ω] = 1.20E-03 Drain Source ON resistance
Coss [F] = 7.50E-10 Coss=Cds+Cgd
Qg [C] = 2.00E-08 Gate Charge
Vds [V] = 2.70E+01 Drain Source OFF Voltage
Fly FETs # = 8.00E+00 Numebr of Fly FETs
PdrvFLY [W] = 0.02 Driver Power Loss = ∗ ∗
2
∗ ∗
PCossFLY [W] = 0.07 Coss Power Loss =
1.5
2
PcondFLY [W] = 1.01 Conduction Power Loss = ∗ ∗
4 ∗2
P totFLY [W] = 9.14 Total FLY FETs Power Loss =# ∗ / + +
P totFLY [%] = 29.12 Total FLY FETs Power Loss %
Power Loss L and C parasitic R
CESR[Ω] = 5.00E-05 Resonance Capacitor ESR
LRcore [Ω] = 2.00E-03 Resonance Inductor Rcore
LRac [Ω] = 2.00E-03 Resonance Inductor Rac
2
P Cesr [W] = 0.26 Resonance Capacitor ESR Power Loss =3∗ ∗ ∗
4∗ 2
P Cesr [%] = 0.84 Resonance Capacitor ESR Power Loss %
2
/16
P Lr [W] = 14.06 Resonance Inductor Power Loss = + ∗ 2
∗
P Lr [%] = 44.78 Resonance Inductor Power Loss %
PCB Power Loss
RPCB[Ω] = 0.00E+00 PCB resistance
2
P PCB [W] = 0.00 PCB resistance Power Loss = ∗ ∗
4 ∗2
P PCB [%] = 0.00 PCB resistance Power Loss %
P STCtot[W] 31.40 Total STC Power Loss = + + + +
∗
Efficiency [%] 96.96 Efficiency η=
∗ +
AN5810 - Rev 1 page 20/45
AN5810
Efficiency
Figure 17. Full System Efficiency
3.6 Efficiency
The first measurement shown below is the comparison between STC using U2J and STC using only X7R
capacitors for a 500 W solution (not including bias losses). The second measurement is the efficiency at 54 V
up to 500 W conversion comparing with and without Bias losses. Peak efficiency is above 98% in 1/8 brick form
factor.
Figure 20. 2UJ vs X7R EFF comparison
X7R EFF W and W/o bias
AN5810 - Rev 1 page 21/45
AN5810
Efficiency
Figure 21. Efficiency w/o B.
EFF @54V and 48 V w. Bias vs w/o B.
99.0%
98.5%
98.0%
97.5%
97.0%
96.5%
0 5 10 15 20 25 30 35 40 45
AN5810 - Rev 1 page 22/45
AN5810
Output voltage ripple
3.7 Output voltage ripple
Output voltage ripple is shown in Figure 23 at a nominal input voltage (54 V and 42 V), at half load condition (500
W) on the right. The maximum peak-to-peak voltage at 500 W is 300 mVpp, which represents less than 0.3% of
the output voltage, that is, 13.5 V.
Output voltage ripple at minimum input voltage (42 V), at full load condition (600 W) on the right. The maximum
peak-to-peak voltage at 600 W is 221 mVpp, which represents less than 2.2% of the output voltage, that is, 10 V:
Figure 22. Output voltage ripple vs. VIN
VIN = 54V, 500W VIN = 42V, 500W Load
Figure 23. Output voltage tracking dynamic VIN
Dynamic Vin = 54V to 45V
AN5810 - Rev 1 page 23/45
AN5810
Load regulation
3.8 Load regulation
Output voltage droop vs. current load called Rdroop is shown in Figure 24.
Figure 24. Output voltage droop vs. current load
Vdroop vs Iout @different Dead T
500
450
400
350
300
250
200
150
100
50
0
0 5 10 15 20 25 30 35 40
3.9 Transient response
Figure 25. 20 to 60 A @54 V and 20 A to 50 A at 48 V Load step
AN5810 - Rev 1 page 24/45
AN5810
Startup
3.10 Startup
Figure 26 and Figure 27 show the startup sequence in case of EN STC asserted after and before the application
of VIN.
Figure 26. System startup with EN STC asserted after VIN
Figure 27. System startup and turn OFF with VIN
3.11 Overcurrent and short-circuit protection
Table 10 contains the Input Buck and SMED Controller Response in case of an output short-circuit condition.
Shown in Table 11 are the OV/UV/OT protection thresholds and hysteresis.
Table 10. Overcurrent protection summary
OCP description Input buck response SMED controller response
Short at VOUT during Controller initiates OCP protection due to VIN/
Buck initiates OCP protection
normal operation VOUTEFUSE delta (>5V)
Short at VOUT during Buck begins switching to limit I PGOOD low
OUT and after 150ms
soft-start (watchdog) EN eFuse is reset EN eFuse low after 150ms
Hard short at buck Buck begins switching to limit IOUT and after 150ms PGOOD low
during soft-start (watchdog) EN eFuse is reset EN eFuse low after 150ms
AN5810 - Rev 1 page 25/45
AN5810
Overcurrent and short-circuit protection
Table 11. Protection thresholds
Protection Threshold Hysteresis
VIN Undervoltage 39V +5V
VIN Overvoltage(1) 61V NA
VOUT Undervoltage(1) VIN/4 - 25% NA
VOUT Overvoltage(1) VIN/4 + 15% NA
VDRIVER(1) 4.8V NA
Overtemperature(1) 115°C NA
Protection Threshold Hysteresis
VIN Undervoltage 39V +5V
VIN Overvoltage(1) 61V NA
VOUT Undervoltage(1) VIN/4 - 25% NA
VOUT Overvoltage(1) VIN/4 + 15% NA
VDRIVER(1) 4.8V NA
Overtemperature(1) 115°C NA
1. In case the threshold protection is triggered to restart the STC it is necessary to toggle the EN STC. All the protection events
are recorded in the STNRG’s ROM and readable by PMbus commands.
At the startup, as soon as the input buck is enabled, a watchdog timer starts and if, after 150 ms, the input buck
VOUT-EFUSE is not ready, the input buck and then the STC are turned off as shown in Figure 28 on the left.
AN5810 - Rev 1 page 26/45
AN5810
Overcurrent and short-circuit protection
Figure 28. Startup in short-circuit (first mage) and overcurrent protection (second image)
AN5810 - Rev 1 page 27/45
AN5810
Thermal imaging
If during a normal operation and undervoltage (UV) is detected on VDRIVER, the PWMs turn OFF in a latched
mode. Due to STC, bidirectional converter is safer to latch it and avoid uncontrolled in and out input current as
shown in Figure 29 . .
Figure 29. Undervoltage on VDRIVER during normal operation
Magenta = EN STC, Yellow = STC, Green = VDRIVER,
Blue = EN Hot Swap
3.12 Thermal imaging
In Figure 30 and Figure 31 below, an IR image sensor measures the evaluation board temperature of active
areas, the STNRG328S SMED controller, STPRDC02A MOSFET drivers and power MOSFETs under loads of
800 W, 900 W. To reach 500 W it required a Heatsink on the flying MOSFETs (top and bottom side).
Test performed at VIN = 54 V and 48, respectfully, at no FAN and low fan speed air-cooling by means of a small
fan for keeping the operating temperature safe, below 125°C.
AN5810 - Rev 1 page 28/45
AN5810
Thermal imaging
Figure 30. Board thermal map; VIN = 54 V with NO Airflow, POUT =500 W
Figure 31. Board thermal map; VIN = 48 V with no fan and low fan at 500 W (right side)
AN5810 - Rev 1 page 29/45
AN5810
Supported PMBus commands
4 Supported PMBus commands
Latest Pmbus rev, to support X7R tuning parameters too, the default PMBus slave address is 0x50 (7-bit) with
both PIN6 and PIN7 pulled down, so the respective default address is 0xA0 with 0xA0 to write and 0xA1 to read.
With different schemes on PIN6 and PIN7, we could set the device slave address as the following:
Table 12. Pin6 and pin7
PMBus address 7-bit (Hex) PIN6 PIN7 Write (HEX) READ (HEX)
0x50 Pulled-down Pulled-down 0xA0 0xA1
0x52 Open Pulled-down 0xA4 0xA5
0x54 Pulled-down Open 0xA8 0xA9
0x56 Open Open 0xAC 0xAD
Table 13. PMBUS commands
Number
Command Transaction
Command name of data Description
code type
bytes
On/Off configuration
ON_OFF_CONFIG 0x02 1 R/W 0x0C turns off the STC,
0x1C it turns on
CLEAR_FAULTS 0x03 1 Send byte Clear status registers
WRITE_PROTECT 0x10 1 R/W Protection against accidental changes
Key capabilities of the device
Current set capabilities:
CAPABILITY 0x19 1 R • Packet error checking
• Maximum bus speed 100kHz
• SMBALERT# signal available
Used to set every status register whose bits can
SMBALERT_MASK 0x1B 2 R/W
affect the assertion of the SMB_ALERT# pin
VOUT_MODE 0x20 2 R VOUT format not implemented
PMBUS_VIN_ON 0x35 2 R/W Set/get the input voltage beyond STC turns on
Set/get Vin_off which intervenes when an
undervoltage occurs, the STC goes into the
PMBUS_VIN_OFF 0x36 2 R/W
UVLO state but is still on, if it remains there for
a certain time then it goes into the shutdown state
Set/get the input voltage that causes an input
PMBUS_VIN_OV FAULT LIMIT 0x55 2 R/W
overvoltage
Critical faults information (one byte)
Supported the following status bits:
• bit 6 UNIT IS OFF
STATUS_BYTE 0x78 1 R/W • bit 5 VOUT_OV_FAULT
• bit 4 IOUT_OC_FAULT
• bit 3 VIN_UV_FAULT
• bit 2 TEMPERATURE FAULT
Critical faults information (one word)
STATUS_WORD 0x79 2 R/W Supported the following status bits in low byte:
• same bits of STATUS_BYTE
AN5810 - Rev 1 page 30/45
AN5810
Supported PMBus commands
Number
Command Transaction
Command name of data Description
code type
bytes
Supported the following status bits in high byte:
• bit 7 VOUT fault
• bit 6 IOUT fault
• bit 5 INPUT FAULT
• bit 4 VDRIVER_UVP
• bit 3 POWER_GOOD Negated
Output voltage warnings and faults
Supported the following status bits:
STATUS_VOUT 0x7A 1 R/W
• bit 7 VOUT_OV_FAULT
• bit 4 VOUT_UV_FAULT
Output current warnings and faults
STATUS_IOUT 0x7B 1 R/W Supported the following status bits:
• bit 7 IOUT_OC_FAULT
Input warnings and faults
Supported the following status bits:
STATUS_INPUT 0x7C 1 R/W • bit 7 VIN_OV_FAULT
• bit 4 VIN_UV_FAULT
• bit 3 Unit Off for insufficient input voltage
Temperature warnings and faults
STATUS_TEMPERATURE 0x7D 1 R/W Supported the following status bits:
• bit 7 OT_FAULT
Communication and memory status
Supported the following status bits:
• bit 7 Invalid or unsupported command
STATUS_CML 0x7E 1 R/W
– received
• bit 6 Invalid or unsupported data received
• bit 5 Packet error check failed
• bit 4 Memory fault detected
Vdriver fault protection flag:
MFR SPECIFIC 0x80 1 R/W 0 for no triggered protection
1 for triggered protection
Read input voltage
READ_VIN 0x88 2 R Format: LINEAR11
Exponent: -2
Read output voltage
READ_VOUT 0x8B 2 R Format: LINEAR16
Exponent: -5
Read temperature NTC [°C]
READ_TEMPERATURE1 0x8D 2 R Format: LINEAR11
Exponent: 0
Read temperature eFuse [°C]
READ_TEMPERATURE2 0x8E 2 R Format: LINEAR11
Exponent: 0
Read PWM frequency[kHz]
READ_FREQUENCY 0x95 2 R
Format: LINEAR11
AN5810 - Rev 1 page 31/45
AN5810
Supported PMBus commands
Number
Command Transaction
Command name of data Description
code type
bytes
Exponent: 0
Read PMBus revision
PMBUS_REVISION 0x98 1 R
Revision 1.3
Read manufacturer model number
MFR_MODEL 0x9A 10 R/
(ASCII: STNRG328A)
MFR_REVISION 0x9B 5 R/W Read/store firmware revision (ASCII)
MFR_DATE 0x9D 5 R/ Returns WWYY of firmware production
PMBUS_USER_DATA02 0xB2 1 R Read the configuration ZCD master/slave
PMBUS_USER_DATA03 0xB3 1 R Return the board configuration
The command set/get the 1st max. rated
MFR MAX TEMP 1 0XC0 2 R/W temperature of the manufacturer. Unit is degree
Celsius
The command set/get the 2nd max. rated
MFR MAX TEMP 2 0XC1 2 R/W temperature of the manufacturer. Unit is degree
Celsius
MFR_WAIT_EN_FAULT: set/get the number of
MFR SPECIFIC 12 0XD0 2 R/W system ticks before enabling faults, after entering
ST_ON
MFR_WAIT_EN_FAULT1: set/get the number of
MFR SPECIFIC 13 0XD1 2 R/W system ticks before enabling faults, after entering
ST_ON (second restart)
MFR_WAIT_TIMEPWRUP: read/write the
MFR SPECIFIC 14 0XD2 2 R/W
number of ticks to wait at power-up
MFR_WAIT_BEFORE_EFUSE: read/write the
MFR SPECIFIC 15 0XD3 2 R/W
number of ticks to wait before ENEFuse asserted
MFR_VOUT_EFUSE_MIN: set/get minimum
MFR SPECIFIC 17 0XD5 2 R/W value of Vout eFuse for which Vout eFuse
undervoltage is triggered
MFR_OCP_VALUEDIF: voltage difference
MFR SPECIFIC 18 0XD6 2 R/W between input voltage and Vout eFuse to detect a
hot swap overcurrent condition
MFR SPECIFIC 19 0XD7 2 R/W Read conversion ratio
MFR_ VDRIVER_UVP_DAC: set/get the internal
MFR SPECIFIC 21 0XD9 2 R/W reference for undervoltage for Vdriver. Numeric
format is LINEAR11
MFR_VIN_SHUTDOWN: set/get input voltage
threshold. When the input voltage becomes less
MFR SPECIFIC 22 0XDA 2 R/W
than this value, the STC is put in OFF state.
Numeric format is LINEAR11
MFR_SWITCHFREQ_FF_STEP: set/get the step
of the switching frequency. At feedforward
MFR SPECIFIC 23 0XDB 2 R/W
threshold, switching frequency changes by this
value (kHz),
MFR_FF_THRESHOLD_VMIN: set/get the
feedforward frequency step threshold
MFR SPECIFIC 24 0XDC 2 R/W (min. voltage) put this value into
FF_THRESHOLD_VMIN. Numeric format is
LINEAR11
AN5810 - Rev 1 page 32/45
AN5810
Supported PMBus commands
Number
Command Transaction
Command name of data Description
code type
bytes
MFR_FF_THRESHOLD_VMAX: set/get
feedforward frequency step threshold
MFR SPECIFIC 25 0XDD 2 R/W (max. voltage) put this value into
FF_THRESHOLD_VMAX. Numeric format is
LINEAR11
MFR_ENABLE_BOOTLOADER: Enable/disable
MFR SPECIFIC 26 0XDE 2 R/W
bootloader by UART
MFR_SWITCH_FREQ: set/get the programmable
MFR SPECIFIC 27 0XDF 2 R/W
switching frequency. Numeric format is LINEAR11
MFR_OVP_COUNTER 0xE0 2 R/W Vout OVP protection counter
MFR_UVP_COUNTER 0xE1 2 R/W Vout UVP protection counter
MFR_OCP_COUNTER 0xE2 2 R/W Input OCP protection counter
MFR_THERMSHDW_COUNTER 0xE3 2 R/W NTC OT protection counter
MFR_LOCK: insert password (6 bytes) to lock
MFR SPECIFIC 32 0XE4 6 R/W
EEPROM writing.
MFR_UNLOCK: insert password (6 bytes) to
MFR SPECIFIC 33 0xE5 6 R/W
unlock EEPROM writing.
MFR SPECIFIC 36 0XE8 2 R/W Return the count of Vout_Efuse fails
MFR_START_CRC_CHECK: start the CRC
MFR SPECIFIC 38 0XEA 1 R
check
MFR_GET_CRC_RESULT: get the CODE CRC
MFR SPECIFIC 39 0XEB 4 R
result
MFR_GET_EEPROM_CHECKSUM: get the
MFR SPECIFIC 40 0XEC 2 R
EEPROM checksum
MFR_GRT_DATA_CRC_RESULT: Get the DATA
MFR SPECIFIC 44 0XF0 4 R
CRC result
Get/set the index of ZCD Matrix table. The range
PMBUS_USER_DATA00 0XB0 1 R/W is [0,18], outside of this range the command
returns the error code 0xFF.
Read/write the ZCD parameters in the ZCD
Matrix table (RAM if STC is ON, EEPROM if STC
MFR SPECIFIC 45 0XF1 8 R/W is OFF) at the index specified by the command.
If the index is out of range, the command returns
the sequence of error code 0xFF.
The command loads the ZCD Matrix table from
MFR SPECIFIC 46 0XF2 1 R/W RAM to FLASH. It returns 1 if the copy is
successful, or else it returns 0.
The command read/write the increment of
SMED0 clock from/to FLASH memory. The range
MFR SPECIFIC 41 0XED 1 R/W
is [0,50]. The command returns 0xFF when the
value is out of the range or when the STC is ON.
The command returns the current line and the
relative index of the ZCD Matrix, corresponding to
PMBUS_USER_DATA01 0xB1 9 R/
Vin applied when STC is ON. If STC is OFF the
bytes are 0xFF.
Max. precharged Vout threshold before turning-
VOUT_STUPSWITCH 0xF3 2 R/W
ON
AN5810 - Rev 1 page 33/45
AN5810
Bill of material
5 Bill of material
Table 14. Bill of material
Item Reference Quantity Value Supplier Description
CVCC_2, CVCC_3,
CVCC_5, CVCC_6,
CBY_6, CVDR1_5,
CAP CER 16V X5R
2 CVDR1_6, 11 1µF Murata
0402
CVDR2_5,
CVDR2_6, C21_10,
C21_12
C4, CF1_7, C6_7, CAP CER 16V X5R
3 4 1µF Murata
C17_9 0402
C2, Cuart_7, CF2_7,
CAP CER 25V X5R
4 C3_7, CF4_7, C4_7, 8 0.1µF Murata
0402
C5_7, C9_9
CAP CER 25V X5R
5 C3, CF3_7, Fsw_C 3 10000pF TDK
0402
GRM31CR71H475K
6 Cres1 to 16 10 10uF Murata
A12L
Cres 18 to 40 13 4.7uF TaiyoYuden TMK212AB7475KG
CVIN1_2, CVIN2_2,
CVIN3_2, CVIN4_2,
CVIN5_2, C5_9,
CVIN6_2, CVIN7_2, CAP CER 100V X7S
CVIN8_2, C8_9, 1210
7 CVIN9_2, CVIN10_2, 12 10µF Murata
CVIN11_2, GRM32EC72A106K
CVIN12_2, E05L
CVIN13_2,
CVIN14_2, C16_9,
C14_10, C14_12,
CVIN1_3, CVIN2_3,
CVIN3_3, CVIN4_3,
CVIN5_3, CVIN6_3, CAP CER 50V X7S
CVIN7_3, CVIN8_3, 1210
8 CVIN9_3, CVIN10_3, 12 10µF Murata
CVIN11_3, GRM32ER71H106K
CVIN12_3, A12L
CVIN13_3,
CVIN14_3,
CAP CER 50V
9 Cconf2, Cconf3 2 100pF Murata
C0G/Np0 0402
CAP CER 50V
10 Cconf5, Cconf6 2 100pF Murata
C0G/Np0 0402
CAP CER 100V X7R
11 Ccp2, Ccp_3 2 0.47µF Murata
0805
Cout4_7, Cout4_8,
Cout2_7, Cout2_9,
Cout4_10, Cout2_8,
Cout1_5, Cout2_5,
Cout3_5, Cout10_7,
Cout11_7, Cout12_7, Taiyo CAP CER 25V X5R
12 24 22µF
Cout10_5, Cout11_5, Yuden 1206
Cout1_8, Cout2_10,
Cout3_8, Cout1_6,
Cout12_5, Cout1_9,
Cout2_11, Cout3_9,
Cout2_6, Cout3_6,
AN5810 - Rev 1 page 34/45
AN5810
Bill of material
Item Reference Quantity Value Supplier Description
CAP ALUM POLY
13 Cout5_5 1 270µF Panasonic
20% 25V SMD
14 Cp 1 22pF Murata CAP CER 0402 X5R
CAP CER 25V X5R
15 C5 1 2.2µF Murata
0402
CAP CER 10V X5R
16 C7 1 22µF Murata
0603
CAP ALUM 20% 63V
17 C1_9 1 100µF Panasonic
SMD
CAP CE 50V X7R
18 C18_A, C19_A 4 2.2µF TDK
0805
CAP CER 50V X7R
19 C4_9 1 0.1µF Yageo
0402
CAP CER 10V X5R
20 C6_9 1 10µF Samsung
0402
CAP CER 25V X5R
21 C7_7 1 0.1µF Murata
0402
100V ±10% X5R
22 C11_9 1 0.1µF Murata
0402SMD
CAP CER 100V X7R
23 C7_9, 6 0.1µF AVX
1206
Taiyo CAP CER 16V X7R
24 C12_9 1 4700pF
Yuden 0402
CAP CER 100V Np0
25 C14_9 1 10pF AVX
0603
CAP CER 25V X5R
26 C15_9 1 10µF Murata
0603
CAP CER 50V X7R
27 C18_9 1 1000pF Murata
0402
Taiyo CAP CER 6V X7R
28 C21_9 1 100pF
Yuden 0402
CAP CER 16V X5R
29 C17_10, 1 0.47µF Murata
0402
Schottky diodes &
DBY_5, DBX_5,
30 4 Infineon rectifiers Lw VF
DBX_6, DBY_7
Schottky diode
DB_2, DBY2, DB_3,
2A, 40V Schottky
31 DBY3, DBX3, 6 ONSemi
barrier diode
DBX2_2
Schottky diodes &
32 DBX4, DBX5 2 Infineon rectifiers Lw VF
Schottky diode
LED RED
33 D2 1 Broadcom DIFFUSED 1206
SMD
DIODE SCHOTTKY
34 D3 1 Diodes
100V
RES SMD 1kΩ 5%
35 Fsw_R_1k 1 Panasonic
1/10W 0402
RES SMD 910 Ω 1%
36 Fsw_set_R 1 Panasonic
1/10W 0402
AN5810 - Rev 1 page 35/45
AN5810
Bill of material
Item Reference Quantity Value Supplier Description
TERM SCREW 6-32
37 M1, GND1 2 Keystone
4 PIN PCB
J1_PWM,
38 2
J2_I2C_SWIM
Heavy duty power
J2_EF, J5_EF,
39 3 Anderson connectors pp15/45
J1_EF1
contact pin
Heavy duty power
J3_EF, J4_EF,
40 4 Anderson connectors pp15/45
J6_EF, J6_EFF1
contact pin
41 J4_V, J4_V1, J4_V2 3
TERM SCREW 6-32
42 J5_EFF, J6_EFF 2 Keystone
4 PIN PCB
Heavy duty power
43 J5_EFF1 1 Anderson connectors pp15/45
contact pin
44 L1 1 47µH Murata LQH32PB470MNO
1 ELEMENT,
0.33µH, GENERAL
45 Lin1, Lin 2 330nH ITG
PURPOSE
INDUCTOR, SMD
TPI078060l056N
46 L2, L3, L5, L6 2 56nH Kemet or Pulse
PA0512.700NLT
Wurth FERRITE BEAD 120
47 L1_7 1 120
Electronics Ω 0603 1LN
MHD1, MHD3, CONNECTION
48 4
MHD4, MHD5 TERMINALS
NO CONNECT
49 R27_10 1
(OPEN)
Q5, Q6, Q9, Q10, MOSFET N-CH 25V
50 8 Infineon/ ONsemi
Q25, Q27, Q29, Q30 32A 8SON
Infineon/ MOSFET N-CH 25V
51 Q7, Q8, Q26, Q28 4
STMicroelectronics 32A 8SON
MOSFET N-CH 80V
52 Q1__HSW1 1 STMicroelectronics POWERFLAT5X6
STL130N8
53 Q1__HSW3 1 STMicroelectronics STL3575
Q13, Q14, Q15, Q16, STMicroelectronics/ MOSFET N-CH 40V
54 4
Q17, Q18, Q19, Q20 Infineon 22A TSDSON-8
RES SMD 0.1%
55 RDWN_VDRIVE 1 1.07kΩ Panasonic
1/16W 0402
RVCC_2, RVCC_3,
RES SMD 5% 1/10W
56 RVCC_5, RVCC_6, 5 2.2Ω Panasonic
0603
RF_7
RTD_2, RTD_3, RES SMD1% 1/10W
57 4 53.6kΩ Panasonic
RTD_5, RTD_6 0402
RTdw1, RTdw2, RES SMD5% 1/10W
58 3 100kΩ Panasonic
R22_10 0402
RTup1, RTup2, RES SMD1% 1/10W
59 3 150kΩ Panasonic
R22_9 0402
AN5810 - Rev 1 page 36/45
AN5810
Bill of material
Item Reference Quantity Value Supplier Description
RES SMD0.1%
60 RUP_VDRIVE 1 3.92kΩ Panasonic
1/16W 0402
RES SMD 5% 1/10W
61 RUart_I2C 1 2.2kΩ Panasonic
0402
R1, R2, RVDRY_5,
RVDRX_5,
RES SMDJUMPER
62 RVDRY_6, 8 0Ω Yageo
1/16W 0402
RVDRX_6, R25_9,
R27_9
RES SMD 5% 1/10W
63 RdwOut 1 1.2kΩ Panasonic
0402
RES SMD 5% 1/10W
64 RdwVin, RdwVef 2 2.2kΩ Panasonic
0402
RES SMD 5% 1/10W
65 RdwnENE 1 1MΩ Panasonic
0402
NTC thermistor 5%
66 Rntc1, Rntc2 2 100kΩ Vishay
0603
RES SMD 5% 1/10W
67 RupOut 1 18kΩ Panasonic
0402
68 RupVin, RupVef 2 Yageo Thin film resistor
RES SMD 1% 1/16W
69 R3 1 80.6kΩ Yageo
0402
RES SMD 5% 1/16W
70 R4, R15_9 2 10kΩ Yageo
0402
RES SMD 5% 1/10W
71 R5 1 1.5MΩ Panasonic
0402
RES SMD 1% 1/10W
72 R6 1 4.99kΩ Panasonic
0402
RES SMD 1% 1/10W
73 R7 1 32.4kΩ Panasonic
0402
RES SMD 1% 1/16W
74 R1_9 1 60.4kΩ Yageo
0402
RES SMD 1% 1/16W
75 R2_9 1 1.91kΩ Yageo
0402
R3_7, R4_7,
RES SMD 5% 1/10W
76 R6_N_7, R28_9, 6 1kΩ Panasonic
0402
R28_11, R28_13
77 R3_9 1 Yageo Thin film resistor
RES SMD 5% 1/10W
78 R5_N_7 1 1kΩ Panasonic
0402
RES SMDJUMPER
79 R6_9, R16_9, R18_9 3 0Ω Yageo
1/16W 0402
RES SMD 1% 1/16W
80 R7_9 1 301kΩ Yageo
0402
RES SMD 1% 1/16W
81 R8_9 1 80.6kΩ Yageo
0402
R10_9, R24_10, RES SMD 1% 1/16W
82 4 2kΩ Yageo
R25_10 0402
RES SMD 1% 1/10W
83 R23_9 1 90.9kΩ Panasonic
0402
RES SMD JUMPER
84 R24_9, R26_9 2 0Ω Yageo
1/16W 0402
AN5810 - Rev 1 page 37/45
AN5810
Bill of material
Item Reference Quantity Value Supplier Description
RES SMD 5% 1/16W
85 R25_9 1 10kΩ Yageo
0402
RES SMD 5% 1/10W
86 R23_10 1 1Ω Panasonic
0603
RES SMD 1% 1/10W
87 1 4.99kΩ Panasonic
0402
CTS Electro SWITCH SLIDE DIP
88 SW1 1
components SPST 100mA 20V
High-performance
89 U2, U3, U5, U6 4 STMicroelectronics high-voltage full-
bridge Driver
90 U7 1 STMicroelectronics STNRG328S
IC REG LDO 3.3V
91 U8_A 1 STMicroelectronics
0.2A 6DFN
IC REG CTRLR
92 U9 1 Linear Technology
SYNC BUCK 24QFN
93 U1 2 STMicroelectronics eFuse
94 D6 1 ZENER DIODE
R24_11, R28_12,
95 2 LittleFuse NO CONNECT
R24_13
96 R24_12 1 Yageo NO CONNECT
RES SMD 5% 1/16W
97 R33_9 1 120k Yageo
0402
98 C16_10 1 100nF Yageo 100nF, 100V
C16_11, C222,
C223, C7_12,
Samsung Electro-
99 C7_13, Cconf2, 7 100nF 100nF, 16V
Mechanics
Cconf3, Cconf6,
Cconf5
C2_11, C3_11,
100 4 10µF Murata 10µF, 10V
C2_10, C3_10
101 C2_9, C3_9 2 2.2µF Murata 2.2µF, 100V
102 R6_10 1 0 Murata 0Ω
RES SMD 5% 1/16W
103 R30_9 1 10k Yageo
0402
R_ZVS2, R_ZVS1,
104 R_ZVS, R_ZVS4, 6 1KΩ
RDTdw3, RDTdw4,
105 R_ZVS3, R_ZVS5 2 420Ω
106
AN5810 - Rev 1 page 38/45
AN5810
Package information
6 Package information
Reference top and bottom layout:
Figure
Reference TOP and Bottom 32. Top
Layout : and bottom layout
Drivers , Resonant LC , rectification Mosfet , Floating mosfet
CONTROLLER
January 2021 ST Confidential 36/39
www.st.com
AN5810 - Rev 1 page 39/45
AN5810
Support material
7 Support material
Table 15. Main IC description
Related design support material
Gerber files – ask your ST representative
PCB layout, bill of materials and schematics files – ask your ST representative
STNRG328 Upgrade Firmware Procedure – ask your ST representative
Documentation
STNRG328S; Digital controller for power conversion applications with up to 6 programmable PWM generators, 96 MHz PLL
STPRDC02A; High-Performance High-Voltage Full-Bridge Driver
STL130N8F7; N-channel 80 V, 3.0 mΩ typ., 120 A STripFET™ F7 Power MOSFET in a PowerFLAT™ 5x6 package
STL35N3LH8; N-channel 75 V, 20 mΩ typ., 32 A STripFET™ F3 Power MOSFET in a PowerFLAT™ 3.3x3.3 package
STL260N45LH7; N-channel 45 V
LDK220PU33R; 200mA low quiescent current and low noise LDO
LTC7801,LM5060 or LTC7801.; 150V Low IQ, Synchronous Step-Down DC/DC Controller
AN5810 - Rev 1 page 40/45
AN5810
Revision history
Table 16. Document revision history
Date Version Changes
7-Feb-2023 1 Initial release.
AN5810 - Rev 1 page 41/45
AN5810
Contents
Contents
1 Main features and circuit description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 STC power section & drivers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 STC digital control engine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.1 Hot swap . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Auxiliary power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.3 Startup sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4 Design guidelines with special focus on the inductor and capacitor selections . . . . . . . . . . . 16
3.5 Power losses and efficiency. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.6 Efficiency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.7 Output voltage ripple. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.8 Load regulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.9 Transient response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.10 Startup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.11 Overcurrent and short-circuit protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.12 Thermal imaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Supported PMBus commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
5 Bill of material . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
6 Package information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
7 Support material. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
List of tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
List of figures. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
AN5810 - Rev 1 page 42/45
AN5810
List of tables
List of tables
Table 1. Main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Table 2. STC tested configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Table 3. Pin12 cpp0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Table 4. Resistors setting for cpp0 configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Table 5. Ration & RdwOut 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Table 6. PWM frequency control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Table 7. PGOOD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Table 8. Suggested pin to pin capacitors part numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Table 9. Equivalent resonant capacitances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Table 10. Overcurrent protection summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Table 11. Protection thresholds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Table 12. Pin6 and pin7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Table 13. PMBUS commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Table 14. Bill of material . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Table 15. Main IC description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Table 16. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
AN5810 - Rev 1 page 43/45
AN5810
List of figures
List of figures
Figure 1. 500W, ⅛ brick STC converter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Figure 2. STC principle schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Figure 3. Ton phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Figure 4. TOFF phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Figure 5. STC concept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Figure 6. STC simulation POUT = 500 W and VIN = 54 V → main STC nodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Figure 7. STC simulation POUT = 500 W and VIN = 54 V → C voltage & L current . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Figure 8. Rectification MOSFETs driver section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Figure 9. Floating MOSFETs driver section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Figure 10. SMED digital engine STNRG328S block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Figure 11. Ration & RdwOut 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figure 12. STC state machine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Figure 13. Digital engine STNRG328S section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Figure 14. Input section A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 15. Input section B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 16. Startup sequence with EN STC asserted after VIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figure 17. Inductors selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 18. Power losses and efficiency calculations (POUT = 500 W). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figure 19. Power losses and efficiency calculation (POUT = 1 kW) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Figure 20. 2UJ vs X7R EFF comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 21. Efficiency w/o B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 22. Output voltage ripple vs. VIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figure 23. Output voltage tracking dynamic VIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figure 24. Output voltage droop vs. current load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Figure 25. 20 to 60 A @54 V and 20 A to 50 A at 48 V Load step . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Figure 26. System startup with EN STC asserted after VIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 27. System startup and turn OFF with VIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 28. Startup in short-circuit (first mage) and overcurrent protection (second image) . . . . . . . . . . . . . . . . . . . . . . . 27
Figure 29. Undervoltage on VDRIVER during normal operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Figure 30. Board thermal map; VIN = 54 V with NO Airflow, POUT =500 W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Figure 31. Board thermal map; VIN = 48 V with no fan and low fan at 500 W (right side) . . . . . . . . . . . . . . . . . . . . . . . . 29
Figure 32. Top and bottom layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
AN5810 - Rev 1 page 44/45
AN5810
IMPORTANT NOTICE – READ CAREFULLY
STMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, enhancements, modifications, and improvements to ST
products and/or to this document at any time without notice. Purchasers should obtain the latest relevant information on ST products before placing orders. ST
products are sold pursuant to ST’s terms and conditions of sale in place at the time of order acknowledgment.
Purchasers are solely responsible for the choice, selection, and use of ST products and ST assumes no liability for application assistance or the design of
purchasers’ products.
No license, express or implied, to any intellectual property right is granted by ST herein.
Resale of ST products with provisions different from the information set forth herein shall void any warranty granted by ST for such product.
ST and the ST logo are trademarks of ST. For additional information about ST trademarks, refer to www.st.com/trademarks. All other product or service names
are the property of their respective owners.
Information in this document supersedes and replaces information previously supplied in any prior versions of this document.
© 2023 STMicroelectronics – All rights reserved
AN5810 - Rev 1 page 45/45
You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- TK 51916-18-OP Direct Drive DSR Operators Manual Rev 12 06-16 - ML PDFDocument334 pagesTK 51916-18-OP Direct Drive DSR Operators Manual Rev 12 06-16 - ML PDFRaphael GamaNo ratings yet
- Fender Jazzmaster Ultralight Amp ManualDocument10 pagesFender Jazzmaster Ultralight Amp ManualBenNo ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Ulta Stepup DC To DC Conveter With Reduced Switch StressDocument21 pagesUlta Stepup DC To DC Conveter With Reduced Switch StressDRISHYANo ratings yet
- 555 Timer Ic: Project ReportDocument10 pages555 Timer Ic: Project ReportHarshada HalarnkarNo ratings yet
- MA5600T&MA5603T&MA5608T Hardware Description 23Document973 pagesMA5600T&MA5603T&MA5608T Hardware Description 23ibitisamNo ratings yet
- Expt 9 - Astable-Multivibrator (2020)Document5 pagesExpt 9 - Astable-Multivibrator (2020)samarth100% (1)
- Industrial Contact Nashik PDFDocument196 pagesIndustrial Contact Nashik PDFGanesh Mali0% (1)
- Troubleshooting DS 610 SLDocument11 pagesTroubleshooting DS 610 SLcraigh100% (1)
- EDS Index 2015 02 24Document138 pagesEDS Index 2015 02 24SANGRAMNo ratings yet
- Slua 053Document13 pagesSlua 053carlosibaNo ratings yet
- TA8251AH: Max Power 30W BTL × 4ch Audio Power ICDocument13 pagesTA8251AH: Max Power 30W BTL × 4ch Audio Power ICРамиль Невмянов100% (1)
- Module-5 - INVERTER - VII-POWER ELECTRONICS - 2015-17 SchemeDocument22 pagesModule-5 - INVERTER - VII-POWER ELECTRONICS - 2015-17 SchemeK N DEEPSHINo ratings yet
- Current Controller For Stepping Motors: DescriptionDocument8 pagesCurrent Controller For Stepping Motors: Descriptiontryu40No ratings yet
- Uc3842 - Current-Mode ControlDocument16 pagesUc3842 - Current-Mode ControlGiovani AkNo ratings yet
- Laboratory Report on Integrator and Differentiator CircuitDocument22 pagesLaboratory Report on Integrator and Differentiator CircuitHrivu Dasmunshi (RA1911004010566)No ratings yet
- STK401-090 50W Audio Amp Spec SheetDocument10 pagesSTK401-090 50W Audio Amp Spec SheetHERNANDO A BECERRANo ratings yet
- Toshiba Bipolar IC Drives DC MotorsDocument14 pagesToshiba Bipolar IC Drives DC MotorsrikyNo ratings yet
- DC DC 2 Pe Au 20 11 08Document31 pagesDC DC 2 Pe Au 20 11 08Ali AhmadNo ratings yet
- Rectification. 10 CO2 L3 Sol N.: Maharaja Institute of Technology MysoreDocument7 pagesRectification. 10 CO2 L3 Sol N.: Maharaja Institute of Technology MysoreSpoorthy HUNo ratings yet
- Oscillator ManualDocument22 pagesOscillator ManualckooipgNo ratings yet
- 2 STL 2580Document14 pages2 STL 2580The FatherNo ratings yet
- Electronic Circuits LatestDocument69 pagesElectronic Circuits LatestSai SadiqNo ratings yet
- DP8600C YwDocument9 pagesDP8600C YwSURESH CHANDRA ROUTNo ratings yet
- Iris 4015Document6 pagesIris 4015vetchboyNo ratings yet
- 固电半导体 Inchange Semicondutor: Silicon NPN Power TransistorsDocument3 pages固电半导体 Inchange Semicondutor: Silicon NPN Power Transistorsyiyus1No ratings yet
- Single-Stage BJT Amplifiers: Experiment-2Document19 pagesSingle-Stage BJT Amplifiers: Experiment-2karan007_mNo ratings yet
- Trickle-Charge IC For Two-Cell, Lithium-Ion BatteriesDocument8 pagesTrickle-Charge IC For Two-Cell, Lithium-Ion BatteriesDary CalaçaNo ratings yet
- EC6304 Electronic Circuits I Question BankDocument10 pagesEC6304 Electronic Circuits I Question BankAnonymous kQZgP8No ratings yet
- En CD00003897 PDFDocument7 pagesEn CD00003897 PDFJosias AndradeNo ratings yet
- AN948Document6 pagesAN948cubucetaNo ratings yet
- Vco WDocument8 pagesVco Wapi-3725139No ratings yet
- BU808DFIDocument8 pagesBU808DFIjsalinas78No ratings yet
- Aec AssignmentDocument14 pagesAec AssignmentAnnu YadavNo ratings yet
- STK401-110 AF Power Amplifier (Split Power Supply) Technical DocumentationDocument8 pagesSTK401-110 AF Power Amplifier (Split Power Supply) Technical DocumentationKyaw San OoNo ratings yet
- Unijunction TransistorDocument54 pagesUnijunction TransistorPaoNo ratings yet
- TB2929HQ: 45W × 4-ch BTL Audio Power ICDocument17 pagesTB2929HQ: 45W × 4-ch BTL Audio Power ICmicaelfnNo ratings yet
- Linear Integrated Circuit Tone RingerDocument3 pagesLinear Integrated Circuit Tone RingerLenon Salazar100% (1)
- MC13783 Buck and Boost Inductor Sizing: Application NoteDocument8 pagesMC13783 Buck and Boost Inductor Sizing: Application NoteVitaliyGNo ratings yet
- Boost ProjectDocument13 pagesBoost ProjectAbdur RahmanNo ratings yet
- Data SheetDocument17 pagesData SheetSaprinus SapNo ratings yet
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- Ultra-Fast Acting Electronic Circuit BreakerDocument55 pagesUltra-Fast Acting Electronic Circuit Breakerpandi60% (5)
- AND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteDocument8 pagesAND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteIgor MairinckNo ratings yet
- Expt - 7 :transistorized Astable MultivibratorDocument4 pagesExpt - 7 :transistorized Astable Multivibratorsamarth100% (1)
- ST1802FX: High Voltage Fast - Switching NPN Power TransistorDocument10 pagesST1802FX: High Voltage Fast - Switching NPN Power Transistorvali dNo ratings yet
- ST1510FX-ST MicroelectronicsDocument10 pagesST1510FX-ST MicroelectronicsSastra DjinggaNo ratings yet
- BU808DFI: High Voltage Fast-Switching NPN Power DarlingtonDocument8 pagesBU808DFI: High Voltage Fast-Switching NPN Power DarlingtonOvo BabaAzizi OvoNo ratings yet
- BU808DFI: High Voltage Fast-Switching NPN Power DarlingtonDocument7 pagesBU808DFI: High Voltage Fast-Switching NPN Power DarlingtonEsoj NoryaleNo ratings yet
- Variable DC Power Using Full Bridge ConverterDocument6 pagesVariable DC Power Using Full Bridge Convertergoten10daNo ratings yet
- Open Ended 1Document12 pagesOpen Ended 1AneeshaNo ratings yet
- ELET 201 - Basic Industrial Electronics - Lab Manual - 2023Document140 pagesELET 201 - Basic Industrial Electronics - Lab Manual - 2023bandr almalkiNo ratings yet
- Unisonic Technologies Co., LTD: High Performance Current Mode PWM ControllersDocument7 pagesUnisonic Technologies Co., LTD: High Performance Current Mode PWM ControllersCesra HMNo ratings yet
- 固电半导体 Inchange Semiconductor: Silicon NPN Power TransistorsDocument4 pages固电半导体 Inchange Semiconductor: Silicon NPN Power TransistorsJosé Joaquim Braga BragaNo ratings yet
- Electroestimulador Mettler - ME200 ServiceDocument13 pagesElectroestimulador Mettler - ME200 ServicedanielNo ratings yet
- TA7280P, TA7281P: 5.8W Dual Audio Power Amplifier. 22W BTL Audio Power AmplifierDocument15 pagesTA7280P, TA7281P: 5.8W Dual Audio Power Amplifier. 22W BTL Audio Power AmplifierMates IoanNo ratings yet
- Phototransistor Switching Time Analysis: Output WaveformsDocument8 pagesPhototransistor Switching Time Analysis: Output WaveformsklklkNo ratings yet
- Ece Vii Power Electronics (10ec73) AssignmentDocument6 pagesEce Vii Power Electronics (10ec73) AssignmentThomas PriceNo ratings yet
- 260-Article Text-451-1-10-20171230Document4 pages260-Article Text-451-1-10-20171230Shayan RiazAhmedNo ratings yet
- STGW 30 NC 60 WDDocument14 pagesSTGW 30 NC 60 WDacajevtic94No ratings yet
- 固电半导体 Inchange Semicondutor: Silicon NPN Power TransistorsDocument4 pages固电半导体 Inchange Semicondutor: Silicon NPN Power TransistorssighbalaNo ratings yet
- A Low Voltage High Performance OTA in 0.18 Micron With High LinearityDocument10 pagesA Low Voltage High Performance OTA in 0.18 Micron With High LinearitymohsenparsauniNo ratings yet
- Pulse Density ModulationDocument4 pagesPulse Density ModulationrhusheinNo ratings yet
- Pplication OTE: Low Voltage DC Supply Dimmable Ballast For 1 X 36W T8 LampDocument13 pagesPplication OTE: Low Voltage DC Supply Dimmable Ballast For 1 X 36W T8 LampBravo MacNo ratings yet
- A Full-Bridge Phase-Shifted Inverter For Induction HeatingDocument78 pagesA Full-Bridge Phase-Shifted Inverter For Induction HeatingCCNo ratings yet
- LC5901S Data Sheet Rev.1.5: Sanken Electric Co., LTDDocument29 pagesLC5901S Data Sheet Rev.1.5: Sanken Electric Co., LTDRodolfo ArosemenaNo ratings yet
- VPM1RTDocument1 pageVPM1RTJulioCesar MagalhaesNo ratings yet
- 100W LED Flashlight PDFDocument5 pages100W LED Flashlight PDFRichard Kaven SerquinaNo ratings yet
- Inverter Setting For 55kw SIEI Inanam Spinning MachineDocument1 pageInverter Setting For 55kw SIEI Inanam Spinning Machinenoblas melNo ratings yet
- Sie-C887-5 1h 14 1 PDFDocument305 pagesSie-C887-5 1h 14 1 PDFЗлати ВълчевNo ratings yet
- Model Yuea36Fs-Uer-K V/PH/HZ 230/1/60: Exploded View and Spare Part ListDocument4 pagesModel Yuea36Fs-Uer-K V/PH/HZ 230/1/60: Exploded View and Spare Part ListJose Enrique Sanchez ThompsonNo ratings yet
- Coast LED Lenser Catalog 2009Document73 pagesCoast LED Lenser Catalog 2009rmnhsdNo ratings yet
- TIP41 / TIP41C: FeaturesDocument2 pagesTIP41 / TIP41C: FeaturesCAMILA ROMINA LUCANANo ratings yet
- MVD Universal Battery ChargersDocument4 pagesMVD Universal Battery ChargersYè Winț0% (1)
- Maintenance Manual For Embroidery Machine (Color Display Additional Manual)Document30 pagesMaintenance Manual For Embroidery Machine (Color Display Additional Manual)Azzy KickrNo ratings yet
- LG's Environmental Marketing StrategyDocument93 pagesLG's Environmental Marketing StrategyabhayNo ratings yet
- 6N137 OptocouplerDocument14 pages6N137 OptocouplerAhmad SubkhanNo ratings yet
- Tdq-172718De-65Fv02: Xxpol 1710 2690Mhz×2 65° 18dbi 0° 10° Manual or by Optional Rcu (Remote Control Unit) AntennaDocument1 pageTdq-172718De-65Fv02: Xxpol 1710 2690Mhz×2 65° 18dbi 0° 10° Manual or by Optional Rcu (Remote Control Unit) Antennakamel7777100% (1)
- Medium Voltage NPN Ignition Darlington: ApplicationsDocument4 pagesMedium Voltage NPN Ignition Darlington: ApplicationsJohan GuíaNo ratings yet
- Ass 1Document1 pageAss 1Itefa AnisaNo ratings yet
- Bike Turning Signal CircuitDocument3 pagesBike Turning Signal Circuittim schroder0% (1)
- Available IC List 03-11-2019Document18 pagesAvailable IC List 03-11-2019R. R. ArivazhaganNo ratings yet
- MT3367 Android ScatterDocument8 pagesMT3367 Android Scatterdipaamol9138No ratings yet
- AmfDocument5 pagesAmfJeffrey TeoNo ratings yet
- PS2 Manual Speed Controller GuideDocument1 pagePS2 Manual Speed Controller GuideLuis RolaNo ratings yet
- Motor Taller Sierra PDFDocument10 pagesMotor Taller Sierra PDFRolando Alfaro NuñezNo ratings yet
- 18ECE205J - FPGA-based Embedded System Design - Unit - 1Document151 pages18ECE205J - FPGA-based Embedded System Design - Unit - 1Vikram Adithya AnandNo ratings yet
- Over Current & Earth Fault Relay-Type Vn100R: FeaturesDocument4 pagesOver Current & Earth Fault Relay-Type Vn100R: Featuressujan723No ratings yet
- DO880Document4 pagesDO880sitaNo ratings yet