You might also like
- EE8661-Power Electronics and Drives-Lab ManualDocument117 pagesEE8661-Power Electronics and Drives-Lab ManualSam Jasper80% (5)
- Solucionario Cap 2 Máquinas EléctricasDocument48 pagesSolucionario Cap 2 Máquinas EléctricasfernandoNo ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- σ σ xxσ σ σ σ σ τ τ τ σ σ σ σ σ τ σ τ σ τ τ τ σ xx+σ σ σ: xx yy zz xy yz zxDocument4 pagesσ σ xxσ σ σ σ σ τ τ τ σ σ σ σ σ τ σ τ σ τ τ τ σ xx+σ σ σ: xx yy zz xy yz zxIrfan HaiderNo ratings yet
- Power Converters Lab Manual - M.Tech (PE&ED) - Prepared by Dr.T.DevarajuDocument50 pagesPower Converters Lab Manual - M.Tech (PE&ED) - Prepared by Dr.T.DevarajuhodeeesvcetNo ratings yet
- A Novel 1S Full-Bridge BB InverterDocument7 pagesA Novel 1S Full-Bridge BB InverterAl Bajad MamadNo ratings yet
- Ulta Stepup DC To DC Conveter With Reduced Switch StressDocument21 pagesUlta Stepup DC To DC Conveter With Reduced Switch StressDRISHYANo ratings yet
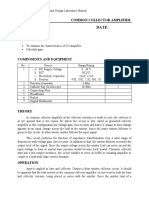
- Name: Date:: Experiment 03 Common Collector AmplifierDocument3 pagesName: Date:: Experiment 03 Common Collector AmplifierJuay Mae RianoNo ratings yet
- PE & S Lab Manual (Student Copy)Document67 pagesPE & S Lab Manual (Student Copy)Chunduri Rambabu100% (4)
- ADC Lab ManualDocument121 pagesADC Lab ManualDR.SENTHILKUMAR MNo ratings yet
- Report - CT FinalDocument12 pagesReport - CT FinalArup DasNo ratings yet
- EC6304 Electronic Circuits I Question BankDocument10 pagesEC6304 Electronic Circuits I Question BankAnonymous kQZgP8No ratings yet
- MC34063AB - MC34063AC MC34063EB - MC34063EC: DC/DC Converter Control CircuitsDocument23 pagesMC34063AB - MC34063AC MC34063EB - MC34063EC: DC/DC Converter Control CircuitsBoglárka TurcsánNo ratings yet
- Ee-8661 Power Electronics and Drives Lab ManualDocument88 pagesEe-8661 Power Electronics and Drives Lab ManualgangshNo ratings yet
- Python Programming 2nd EditionDocument106 pagesPython Programming 2nd Editionshivanand_shettennav100% (1)
- Electronic Stick For Blind People: Submitted by N. JayaprakashDocument16 pagesElectronic Stick For Blind People: Submitted by N. JayaprakashAbdo ZezoNo ratings yet
- 19bee109d - Riya Chauhan - Pec Exp-1 To 10Document51 pages19bee109d - Riya Chauhan - Pec Exp-1 To 10Harshit SolankiNo ratings yet
- Power Electronic Lab 4Document17 pagesPower Electronic Lab 4Muhammed Rafay LakhaniNo ratings yet
- EC6411 CircuitsSimulation LABDocument98 pagesEC6411 CircuitsSimulation LABJ.Gowri ShankarNo ratings yet
- Chapter 5Document38 pagesChapter 5Markos NiguseNo ratings yet
- Electronic Circuits LatestDocument69 pagesElectronic Circuits LatestSai SadiqNo ratings yet
- Ie ManualDocument49 pagesIe ManualPURUSHOTHAMAN MNo ratings yet
- Department of Electrical Engineering, M N National Institute of Technology, Allahabad, INDIADocument21 pagesDepartment of Electrical Engineering, M N National Institute of Technology, Allahabad, INDIAGaurang GuptaNo ratings yet
- 17-Ee6611 Power Electronics LabDocument79 pages17-Ee6611 Power Electronics Labvign3840No ratings yet
- IA Expt5 and 6Document8 pagesIA Expt5 and 6Shravan MotteNo ratings yet
- Design of Front-End Push-Pull Sine Wave Inverter: IOP Conference Series: Earth and Environmental ScienceDocument8 pagesDesign of Front-End Push-Pull Sine Wave Inverter: IOP Conference Series: Earth and Environmental SciencePABLO MAURONo ratings yet
- The Design of Electric Car DC DC Converter Based On The Phase Shifted Full Bridge Zvs ControlDocument5 pagesThe Design of Electric Car DC DC Converter Based On The Phase Shifted Full Bridge Zvs ControlAniket ManjareNo ratings yet
- Power Electronics Concept in Power SystemsDocument9 pagesPower Electronics Concept in Power SystemsT.l. SelvamNo ratings yet
- 3-2power Electronics Lab ManualDocument50 pages3-2power Electronics Lab ManualSivareddy MudiyalaNo ratings yet
- Working Principle of The Inverter SystemDocument10 pagesWorking Principle of The Inverter Systemolawale gbadeboNo ratings yet
- Pec - Exp 1 To 10Document49 pagesPec - Exp 1 To 10Harshit SolankiNo ratings yet
- Max 16841 Ev KitDocument16 pagesMax 16841 Ev KitjorojoroNo ratings yet
- Pow 9Document16 pagesPow 9Muhammed Rafay LakhaniNo ratings yet
- ZVS-ZCS Bidirectional Full-Bridge Converter Achieves High EfficiencyDocument6 pagesZVS-ZCS Bidirectional Full-Bridge Converter Achieves High EfficiencyPradhapndkNo ratings yet
- Sepic Converter Design and Operation: by Gregory SharpDocument21 pagesSepic Converter Design and Operation: by Gregory SharpSingam SridharNo ratings yet
- Sic Bipolar Integrated Circuits On Semi-Insulating SubstratesDocument2 pagesSic Bipolar Integrated Circuits On Semi-Insulating SubstratesEdwin ZhangNo ratings yet
- Aust/Eee: Ahsanullah University of Science and TechnologyDocument27 pagesAust/Eee: Ahsanullah University of Science and Technologyruhul aminNo ratings yet
- Electronic Circuits & Logic Design Laboratory ManualDocument61 pagesElectronic Circuits & Logic Design Laboratory ManualSrihari Y.sNo ratings yet
- FJP13007 High Voltage Fast-Switching NPN Power Transistor: FeaturesDocument6 pagesFJP13007 High Voltage Fast-Switching NPN Power Transistor: FeaturesIman AkbariNo ratings yet
- Lab Manual: Electrical Engineering Materials & Semiconductor Devices Lab (EC-317-F)Document41 pagesLab Manual: Electrical Engineering Materials & Semiconductor Devices Lab (EC-317-F)Ilavarasan TamizhNo ratings yet
- Design Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED LightingDocument13 pagesDesign Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED Lightingshiva1luNo ratings yet
- Experiment No. 8 Phase Shift Oscillator Using Opamp AIMDocument2 pagesExperiment No. 8 Phase Shift Oscillator Using Opamp AIMSom ChoudharyNo ratings yet
- Regulated Power SupplyDocument19 pagesRegulated Power SupplyRonn Albert GabucayNo ratings yet
- ELET 201 - Basic Industrial Electronics - Lab Manual - 2023Document140 pagesELET 201 - Basic Industrial Electronics - Lab Manual - 2023bandr almalkiNo ratings yet
- Agsie - Johnmark Exp1Document7 pagesAgsie - Johnmark Exp1CloudFarmInnovations IncorporatedNo ratings yet
- Week 4 Electrical Utility EngineeringDocument19 pagesWeek 4 Electrical Utility Engineeringprajwal shivaiahNo ratings yet
- Power Devices and ConvertersDocument29 pagesPower Devices and ConvertersFEMY ANNANo ratings yet
- 2 Sa 1776 TV 2 PDocument4 pages2 Sa 1776 TV 2 PLesley HoodNo ratings yet
- Chapter 5: Understanding Transformers in 40 CharactersDocument20 pagesChapter 5: Understanding Transformers in 40 CharactersVievie Le BluewberrietrufflesNo ratings yet
- 固电半导体 Inchange Semicondutor: Silicon NPN Power TransistorsDocument4 pages固电半导体 Inchange Semicondutor: Silicon NPN Power TransistorsRafaél J MalaveNo ratings yet
- CH-4 Edc UploadDocument17 pagesCH-4 Edc UploadOTHEOZ NFTNo ratings yet
- 8448 ESE DEC21 SOE 7 B.tech (ME) EPEG3002 Power Electronics & DrivesDocument2 pages8448 ESE DEC21 SOE 7 B.tech (ME) EPEG3002 Power Electronics & DrivesJoy SummersNo ratings yet
- ESD Lab ManualDocument30 pagesESD Lab ManualJegadeeshan MeganathanNo ratings yet
- DC DC 2 Pe Au 20 11 08Document31 pagesDC DC 2 Pe Au 20 11 08Ali AhmadNo ratings yet
- CalculatorGrades: 20-30 p: 3, 31-40 p: 4, 41-50 p: 5In total 5 exercisesDocument3 pagesCalculatorGrades: 20-30 p: 3, 31-40 p: 4, 41-50 p: 5In total 5 exercisesZaidBNo ratings yet
- Datasheet 2SD1348 SILICON NPN POWER TRANSISTORDocument3 pagesDatasheet 2SD1348 SILICON NPN POWER TRANSISTORPaty RagaNo ratings yet
- Ee694 Power Electronics Lab Manual PDFDocument24 pagesEe694 Power Electronics Lab Manual PDFSabeeh HasnainNo ratings yet
- Experiment No. 6 Op-Amp As Comparator & Schmitt Trigger: Analog Circuits LAB ManualDocument14 pagesExperiment No. 6 Op-Amp As Comparator & Schmitt Trigger: Analog Circuits LAB ManualchaitanyaNo ratings yet
- Oscillator ManualDocument22 pagesOscillator ManualckooipgNo ratings yet
- Modul 6 KB 1 - Power Supply SwitchingDocument19 pagesModul 6 KB 1 - Power Supply SwitchingMargo SusiloNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 雙金屬料管感應加熱製程模擬Document88 pages雙金屬料管感應加熱製程模擬CCNo ratings yet
- 全橋相移式高頻溫控感應加熱器之設計與研製Document131 pages全橋相移式高頻溫控感應加熱器之設計與研製CCNo ratings yet
- Introducing Micro-Bit in Swedish Primary SchoolsDocument127 pagesIntroducing Micro-Bit in Swedish Primary SchoolsBoilerplate4UNo ratings yet
- 2-D Heat Transfer Analysis For Electro-Magnetic Induction HeatingDocument99 pages2-D Heat Transfer Analysis For Electro-Magnetic Induction HeatingCCNo ratings yet
- 全橋相移式高頻溫控感應加熱器之設計與研製Document131 pages全橋相移式高頻溫控感應加熱器之設計與研製CCNo ratings yet
- 058 33 4641 Tutorial English PDFDocument86 pages058 33 4641 Tutorial English PDFCCNo ratings yet
- Microbit Scratch Game ControllerDocument13 pagesMicrobit Scratch Game ControllerCCNo ratings yet
- Machine VisionDocument453 pagesMachine VisionWaterloo Ferreira da SilvaNo ratings yet
- How To Write and Publish A Scientific PaperDocument44 pagesHow To Write and Publish A Scientific PaperCC100% (2)
- ExtraInfo E InternetDocument68 pagesExtraInfo E InternetLuis Alberto StanziolaNo ratings yet
- Quick Start Guide: Requirements Compiling Your ScriptDocument1 pageQuick Start Guide: Requirements Compiling Your ScriptCCNo ratings yet
- Academic Wrtiting For JournalDocument4 pagesAcademic Wrtiting For JournalCCNo ratings yet
- How To Publish Your Journal PaperDocument4 pagesHow To Publish Your Journal PaperCCNo ratings yet
- Basics of Research Paper Writing and PublishingDocument18 pagesBasics of Research Paper Writing and PublishingAli Hussain Kazim100% (1)
- Phet Force and Newton's Laws ReviewDocument5 pagesPhet Force and Newton's Laws ReviewkhairatuddinariNo ratings yet
- Engineering Electromagnetics: The Steady Magnetic FieldDocument71 pagesEngineering Electromagnetics: The Steady Magnetic FieldSandeep RajputNo ratings yet
- MP Notes PDFDocument160 pagesMP Notes PDFElumalaiNo ratings yet
- Physics and Maths Tutor: Forces, Motion and Terminal VelocityDocument9 pagesPhysics and Maths Tutor: Forces, Motion and Terminal VelocityHillary RobloxNo ratings yet
- Using CFD to Design Thermal RollersDocument9 pagesUsing CFD to Design Thermal RollersRocky DarkNo ratings yet
- Modeling and Experimental Results of An Archimedes Screw Turbine PDFDocument11 pagesModeling and Experimental Results of An Archimedes Screw Turbine PDFMuhammad RizaNo ratings yet
- The Theory of EverythingDocument1 pageThe Theory of EverythingjoiannagcaoiliNo ratings yet
- Phase-Controlled AC-DC Converters TutorialDocument3 pagesPhase-Controlled AC-DC Converters TutorialChangyuFuNo ratings yet
- Quantum Double Double Slit Experiment With Momentum Entangled PhotonsDocument11 pagesQuantum Double Double Slit Experiment With Momentum Entangled PhotonsMELINDA BR GINTINGNo ratings yet
- Introduction to Transport PhenomenaDocument16 pagesIntroduction to Transport PhenomenaM TáłHà FâróòqNo ratings yet
- Science and Tech 9th STD English Medium PDFDocument226 pagesScience and Tech 9th STD English Medium PDFSayuj Sreedharan100% (1)
- Time and Distance PDFDocument12 pagesTime and Distance PDFStabhin JoelNo ratings yet
- Hammerhead Tower CraneDocument15 pagesHammerhead Tower CraneMark Pamular100% (1)
- Stego Accessories Calculation of Temperature Control en 0911Document1 pageStego Accessories Calculation of Temperature Control en 0911AnnNo ratings yet
- List of Important Publications in Physics - Wikipedia, The Free Encyclopedia PDFDocument29 pagesList of Important Publications in Physics - Wikipedia, The Free Encyclopedia PDFsatishsahu2018No ratings yet
- Pub - Forces Longman Physics Topics PDFDocument50 pagesPub - Forces Longman Physics Topics PDFMadan DagarNo ratings yet
- Bab 4Document35 pagesBab 4Adek GanteangNo ratings yet
- CV For JobDocument2 pagesCV For JobSuleman AwanNo ratings yet
- Circular MotionDocument15 pagesCircular MotionARUNESH PRATAP SINGHNo ratings yet
- Igloo Keep People WarmDocument1 pageIgloo Keep People Warmjasmine8321No ratings yet
- Modelling and Control of The Modular Multilevel Converter (MMC)Document10 pagesModelling and Control of The Modular Multilevel Converter (MMC)Bianca MetrocertNo ratings yet
- Laser and IPL Technology in Dermatology and Aesthetic MedicineDocument434 pagesLaser and IPL Technology in Dermatology and Aesthetic MedicineMauricio MontemayorNo ratings yet
- Astm D 4439 00 Standard Terminology For Geosynthetics PDFDocument5 pagesAstm D 4439 00 Standard Terminology For Geosynthetics PDFDeyvi ManriqueNo ratings yet
- Essential Elements of Architectural AcousticsDocument4 pagesEssential Elements of Architectural AcousticsJoanna TamanoNo ratings yet
- Pinch ExampleDocument6 pagesPinch Exampledlalameen4471No ratings yet
- Physics Investigatory ProjectDocument15 pagesPhysics Investigatory ProjectSreenath ParameswaranNo ratings yet
- By Sam Henry LarsenDocument16 pagesBy Sam Henry LarsenAmir Borna KeyvandarianNo ratings yet
- Thermodynamic Model For Bouncing Charged Particles InsideDocument7 pagesThermodynamic Model For Bouncing Charged Particles InsideJohn Hernan Diaz ForeroNo ratings yet
- Reservoir Engineering I: Barham S. Mahmood E-Mail: Petroleum Engineering DepartmentDocument16 pagesReservoir Engineering I: Barham S. Mahmood E-Mail: Petroleum Engineering DepartmentAbdulla MohammadNo ratings yet