You might also like
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsFrom EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsNo ratings yet
- Gyro DriveDocument16 pagesGyro DriveVara LakshmiNo ratings yet
- Energy RegenerationDocument6 pagesEnergy RegenerationAvinash AcharyaNo ratings yet
- Regenerative Brake: The Motor As A GeneratorDocument8 pagesRegenerative Brake: The Motor As A GeneratorameermoussaNo ratings yet
- Gyro Bus - The Fly Wheel Powered BusDocument22 pagesGyro Bus - The Fly Wheel Powered BusRam Kumar Gogada77% (13)
- Regenerative Braking SystemDocument4 pagesRegenerative Braking SystemAkash MishraNo ratings yet
- Railway Technology - Chapter 2 - Traction Systems - 2019-02-13Document7 pagesRailway Technology - Chapter 2 - Traction Systems - 2019-02-13Blaise PascalNo ratings yet
- CVT2010 - Mech Hybrid Paper PDFDocument7 pagesCVT2010 - Mech Hybrid Paper PDFSurendra SainiNo ratings yet
- Regeneration in Electric Locomotives With DC Traction MotorsDocument32 pagesRegeneration in Electric Locomotives With DC Traction MotorsBhushan MandvalNo ratings yet
- Mechanical Engineering Page No 1Document30 pagesMechanical Engineering Page No 1Syed SaadNo ratings yet
- Gyrobus: Seminar Report OnDocument11 pagesGyrobus: Seminar Report OnSree LakshmiNo ratings yet
- Regenerative Brake: The Motor As A GeneratorDocument14 pagesRegenerative Brake: The Motor As A GeneratorBhavin MehtaNo ratings yet
- GyrobusDocument24 pagesGyrobusajay kumar royNo ratings yet
- Energy Saving and Environmental Measures in Railway TechnologiesDocument6 pagesEnergy Saving and Environmental Measures in Railway TechnologiesDawit Getachew MelsselNo ratings yet
- GurobusDocument24 pagesGurobuspraveenpv7No ratings yet
- Kinetic Energy Recovery Systems in Motor VehiclesDocument12 pagesKinetic Energy Recovery Systems in Motor Vehiclessahaj sorathiyaNo ratings yet
- A Report On Regenerative Braking in TractionDocument29 pagesA Report On Regenerative Braking in Tractionshubham dhage100% (1)
- Seminar Report On Gyrobus 2012-2013: Dept. of Electrical & Electronics Engg. G.P.T.C, MuttomDocument24 pagesSeminar Report On Gyrobus 2012-2013: Dept. of Electrical & Electronics Engg. G.P.T.C, MuttomVara Lakshmi100% (1)
- Synopsis Project-2Document6 pagesSynopsis Project-2Charanjeet SinghNo ratings yet
- Magnet-Less Electrical MachinesDocument10 pagesMagnet-Less Electrical MachinesReeta DuttaNo ratings yet
- Nonconventional Three Wheel Electric VehDocument7 pagesNonconventional Three Wheel Electric VehAbdelali AabadaNo ratings yet
- Regenerative Electricity: Mr. Alok AdhikariDocument35 pagesRegenerative Electricity: Mr. Alok AdhikariAnonymous l5X3VhTNo ratings yet
- Regenerative Electricity: Mr. Rajesh VishwakarmaDocument35 pagesRegenerative Electricity: Mr. Rajesh VishwakarmaAnonymous l5X3VhTNo ratings yet
- History of Electric Traction in IndiaDocument9 pagesHistory of Electric Traction in IndiaChandra Mohan RawatNo ratings yet
- Hybrid Locomotives OverviewDocument8 pagesHybrid Locomotives OverviewAdji MeldotkomNo ratings yet
- Regenerative Electricity: Mr. Mitesh SahuDocument35 pagesRegenerative Electricity: Mr. Mitesh SahuAnonymous l5X3VhTNo ratings yet
- Kinetic Energy Flywheel Energy StorageDocument13 pagesKinetic Energy Flywheel Energy StorageSarfarazHasanNo ratings yet
- Diesel Pollution UICDocument17 pagesDiesel Pollution UICBrijendra SinghNo ratings yet
- Electric LocomotiveDocument33 pagesElectric LocomotiveAbhinandan KumarNo ratings yet
- Special Edition Paper: Development of An NE TrainDocument9 pagesSpecial Edition Paper: Development of An NE TrainalisameiNo ratings yet
- Regenerative Brake: The Motor As A GeneratorDocument4 pagesRegenerative Brake: The Motor As A GeneratorWhy VenkateshNo ratings yet
- Introduction To Hybrid Drive TrainsDocument16 pagesIntroduction To Hybrid Drive TrainsAkhilesh RavichandranNo ratings yet
- 2Document18 pages2Safalsha BabuNo ratings yet
- 2Document18 pages2Safalsha BabuNo ratings yet
- Electromagnetic Breaking System OkDocument18 pagesElectromagnetic Breaking System Okimran kadriNo ratings yet
- Electric Vehicle Charging Issue With Network by Shah FaisalDocument13 pagesElectric Vehicle Charging Issue With Network by Shah FaisalShah FaisalNo ratings yet
- NGHV Unit 1Document19 pagesNGHV Unit 1PrabhaharMuthuswamyNo ratings yet
- Training Report On Diesel LocomotivesDocument34 pagesTraining Report On Diesel LocomotivesAashish Singhal75% (4)
- Diesel Mechanics by Frank SandersDocument164 pagesDiesel Mechanics by Frank SandersMahdi HocineNo ratings yet
- Production of Three-Phase Electric Locomotives Using IGBT Technology To Implement The HOG SchemeDocument8 pagesProduction of Three-Phase Electric Locomotives Using IGBT Technology To Implement The HOG SchemeAnil VermaNo ratings yet
- Automobile Report Hybrid Electric VehiclesDocument22 pagesAutomobile Report Hybrid Electric VehiclesDeepam ShyamNo ratings yet
- "Regenerative Braking": Project Report OnDocument64 pages"Regenerative Braking": Project Report OnArun Kumar YadavNo ratings yet
- Article Hydrogen Movility PDFDocument21 pagesArticle Hydrogen Movility PDFJeilson Bravo GonzálezNo ratings yet
- Unesco - Eolss Sample Chapters: Hybrid VehiclesDocument7 pagesUnesco - Eolss Sample Chapters: Hybrid VehiclesNgcfhhbbvvNo ratings yet
- Unit I-EvhvDocument98 pagesUnit I-EvhvRajesh BhaskarlaNo ratings yet
- Electric PropulsionDocument4 pagesElectric PropulsionCostin CosNo ratings yet
- Maglev TrainDocument8 pagesMaglev Trainnasreen_mukti93No ratings yet
- Task 2 - Yalqa Rizqi AzkaDocument12 pagesTask 2 - Yalqa Rizqi AzkayalqaraaNo ratings yet
- EHVT Unit 1Document19 pagesEHVT Unit 1SumanranuNo ratings yet
- Regenerative Braking SystemDocument6 pagesRegenerative Braking SystemA. A. SherpedoNo ratings yet
- 2-Introduction To Electric and Hybrid VehicleDocument39 pages2-Introduction To Electric and Hybrid VehicleZoscalesNo ratings yet
- Comparison BrakeDocument8 pagesComparison BrakeGAUTAM DUANo ratings yet
- Effect of Transmission Design On Electric Vehicle (EV) PerformanceDocument6 pagesEffect of Transmission Design On Electric Vehicle (EV) PerformanceSwati NikamNo ratings yet
- Gas Turbine-Electric LocomotiveDocument4 pagesGas Turbine-Electric LocomotiveaghakhanyNo ratings yet
- Topic 1 - Power Generating Shock AbsorberDocument4 pagesTopic 1 - Power Generating Shock AbsorberLinsonNo ratings yet
- Gyro BusDocument15 pagesGyro BusSUMANTA KUMAR NAIK100% (1)
- Compressed Air Propulsion System to Power the Car of the FutureFrom EverandCompressed Air Propulsion System to Power the Car of the FutureNo ratings yet
- UntitledDocument2 pagesUntitledolim owletNo ratings yet
- Performance Comparison of 4 Pole Neod Mag Bedini SSG FEG - PID3140907Document6 pagesPerformance Comparison of 4 Pole Neod Mag Bedini SSG FEG - PID3140907olim owletNo ratings yet
- NASAS CR2 Flywheel Generator - 20060028492Document20 pagesNASAS CR2 Flywheel Generator - 20060028492olim owletNo ratings yet
- Richard E. Byrd: FamilyDocument10 pagesRichard E. Byrd: Familyolim owletNo ratings yet
- US 11389103 - Nervus Vagus Stimulation System - 2013Document48 pagesUS 11389103 - Nervus Vagus Stimulation System - 2013olim owletNo ratings yet
- Self Powererd Generation Using GravityWheel - JETIR2004017Document5 pagesSelf Powererd Generation Using GravityWheel - JETIR2004017olim owletNo ratings yet
- Using Self HypnosisDocument12 pagesUsing Self Hypnosisdorelb76No ratings yet
- Breakthrough Power ReviewDocument3 pagesBreakthrough Power Reviewolim owletNo ratings yet
- Phicen-Female-S.Flexible-Body - EKIA HobbiesDocument1 pagePhicen-Female-S.Flexible-Body - EKIA Hobbiesolim owletNo ratings yet
- Ancient Tomb Lamps Still Found BurningDocument4 pagesAncient Tomb Lamps Still Found Burningolim owletNo ratings yet
- Energy Autarky - Mlleret Al.2011Document12 pagesEnergy Autarky - Mlleret Al.2011olim owletNo ratings yet
- Amarasingam 2019Document1 pageAmarasingam 2019olim owletNo ratings yet
- Energy As A Social Project - Recovering A Discourse - Byrne&Toly 2006Document32 pagesEnergy As A Social Project - Recovering A Discourse - Byrne&Toly 2006olim owletNo ratings yet
- WO2018161142A1 PotterDocument30 pagesWO2018161142A1 Potterolim owletNo ratings yet
- GB2473510ADocument43 pagesGB2473510Aolim owletNo ratings yet
- WoodenPlywoodBoats D.J.Eyres-1975Document11 pagesWoodenPlywoodBoats D.J.Eyres-1975olim owletNo ratings yet
- US Inoperable Inventions USPTO and Pseudoscience - D.Rislove 2007Document39 pagesUS Inoperable Inventions USPTO and Pseudoscience - D.Rislove 2007olim owletNo ratings yet
- Shawn Frayne - Windbelt Micro Power Generator - Article & US Patent ApplicationDocument6 pagesShawn Frayne - Windbelt Micro Power Generator - Article & US Patent Applicationolim owletNo ratings yet
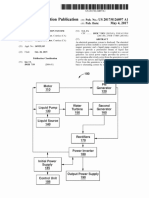
- US20170126097A1Document9 pagesUS20170126097A1olim owletNo ratings yet
- US20080129254A1 S.M.Frayne-2008Document15 pagesUS20080129254A1 S.M.Frayne-2008olim owletNo ratings yet
- Small Electric Power Sources For Your ElectronicsDocument5 pagesSmall Electric Power Sources For Your Electronicsolim owletNo ratings yet
- EP2505807A2 W.Barbat 2012Document43 pagesEP2505807A2 W.Barbat 2012olim owletNo ratings yet
- All Too Familiar Art of Pseudo Argument - The Ethical SkepticDocument11 pagesAll Too Familiar Art of Pseudo Argument - The Ethical Skepticolim owletNo ratings yet
- Chapter2 Finding A Suitable BoatDocument10 pagesChapter2 Finding A Suitable Boatolim owletNo ratings yet
- Fij 5aDocument7 pagesFij 5aolim owletNo ratings yet
- The Strategic Mindset - The Ethical SkepticDocument11 pagesThe Strategic Mindset - The Ethical Skepticolim owletNo ratings yet
- Art & IllusionDocument4 pagesArt & IllusionDopeNo ratings yet
- N. Chomsky-Controlled-Asset-Of-The-New-World-OrderDocument16 pagesN. Chomsky-Controlled-Asset-Of-The-New-World-Orderolim owletNo ratings yet
- Diferencial Mack CRD (150 151)Document192 pagesDiferencial Mack CRD (150 151)Patricio Alejandro Castro Lopez86% (7)
- Nove Tehnologije Montaže Brodskog Trupa U Brodogradnji: New Technologies For Hull Assemblies in ShipbuildingDocument10 pagesNove Tehnologije Montaže Brodskog Trupa U Brodogradnji: New Technologies For Hull Assemblies in Shipbuildingmarkoperic2014No ratings yet
- Varroc Group PresentationDocument14 pagesVarroc Group PresentationvijaysinhjagtapNo ratings yet
- ISYS2110 - Case 8.1 - G6 - Team 1Document6 pagesISYS2110 - Case 8.1 - G6 - Team 1Moonie090% (1)
- 21 Useful Charts For Service TaxDocument35 pages21 Useful Charts For Service TaxSonali SarkarNo ratings yet
- Works & Head Office:: Lifting SolutionsDocument8 pagesWorks & Head Office:: Lifting SolutionsFiroz PawaskarNo ratings yet
- Ryanair Internal & External AnalysisDocument11 pagesRyanair Internal & External Analysisjerrytansg83% (6)
- Hydrarchy - GasworksDocument2 pagesHydrarchy - GasworksnicolaceliawrightNo ratings yet
- Research DesignDocument2 pagesResearch DesignRAMAKRISHNANNo ratings yet
- Rigging & LiftingDocument20 pagesRigging & LiftingAbhishekNo ratings yet
- Malindo AirDocument22 pagesMalindo AirKHAIRIL HAJAR BINTI AHMADNo ratings yet
- LNG Shipping OverviewDocument29 pagesLNG Shipping OverviewpadangiringNo ratings yet
- Case Study 4Document2 pagesCase Study 4Bá Phong LêNo ratings yet
- XS13 Accessories Catalog XscorpionDocument68 pagesXS13 Accessories Catalog Xscorpionhubble86No ratings yet
- Os V CapabilitiesDocument40 pagesOs V CapabilitiesWon-young SeoNo ratings yet
- Trafigura Corporate Brochure en 141218011728 Conversion Gate01Document44 pagesTrafigura Corporate Brochure en 141218011728 Conversion Gate01Uma SubbiahNo ratings yet
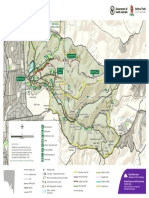
- Belair National Park Map PDFDocument1 pageBelair National Park Map PDFRhys WilliamsNo ratings yet
- 09 Durango1Document1 page09 Durango1GoodBikesNo ratings yet
- Mahesh Industries: GST IN - 24AJWPJ4214A1ZJDocument1 pageMahesh Industries: GST IN - 24AJWPJ4214A1ZJMukesh KuldeepNo ratings yet
- Danone - Scorecard Catman Trade MarketingDocument49 pagesDanone - Scorecard Catman Trade MarketingOrso2010No ratings yet
- A Complete Guide To ECDIS-Summer 2011Document68 pagesA Complete Guide To ECDIS-Summer 2011Henrik Lindqvist100% (3)
- Surveying ReviewerDocument65 pagesSurveying ReviewerJAYVEE LASCUNANo ratings yet
- Electronic Ticket ReceiptDocument3 pagesElectronic Ticket ReceiptJan Irish33% (3)
- LPC1768 Board SchematicDocument1 pageLPC1768 Board Schematicshindo216100% (1)
- 11th English Study MaterialDocument10 pages11th English Study MaterialSTANLEY RAYENNo ratings yet
- Training Scania 2Document6 pagesTraining Scania 2Kharis Mahfudz0% (1)
- Thyssenkrupp Elevator Qatar: Risk AssessmentDocument5 pagesThyssenkrupp Elevator Qatar: Risk AssessmentMahran Mastouri100% (4)
- Technical Familiarization Manual: CSP B-026Document65 pagesTechnical Familiarization Manual: CSP B-026Daniel Vásquez CabreraNo ratings yet
- Ticket TK377126753g88Document3 pagesTicket TK377126753g88genuinejoeatxNo ratings yet
- Sabc Directory2014-2015Document48 pagesSabc Directory2014-2015api-307927988No ratings yet