You might also like
- JSS ACADEMY BUCK BOOST CONVERTER PROJECT PPTDocument7 pagesJSS ACADEMY BUCK BOOST CONVERTER PROJECT PPTvivek5110% (1)
- Homework2 W SolutionDocument6 pagesHomework2 W SolutionAli Cem GöçerNo ratings yet
- Power Quality Issues and Its Mitigation by Unified Power Quality ConditionerDocument9 pagesPower Quality Issues and Its Mitigation by Unified Power Quality ConditionerrezhaNo ratings yet
- APSCivilEngineering Department EnvironmentalStudies TestDocument4 pagesAPSCivilEngineering Department EnvironmentalStudies Test1AP18CS037 Shirish KulkarniNo ratings yet
- ISO 841 en - Pdf-DesbloqueadoDocument8 pagesISO 841 en - Pdf-DesbloqueadoJosé Zegarra Calderón0% (1)
- State Space Modeling of Buck Boost ConverterDocument4 pagesState Space Modeling of Buck Boost ConverterZonun sangaNo ratings yet
- EE PowerElectronicsAndPowerSystemsDocument88 pagesEE PowerElectronicsAndPowerSystemsBenitta MaryNo ratings yet
- Fiber Optics - Fiber Optic Systems Applied To Electric Power IndustryDocument77 pagesFiber Optics - Fiber Optic Systems Applied To Electric Power IndustryGerardo TillanoNo ratings yet
- Load FlowDocument50 pagesLoad FlowET201040 Mohin UddinNo ratings yet
- Unit I Basic Circuits AnalysisDocument36 pagesUnit I Basic Circuits AnalysisHarvey PingcasNo ratings yet
- Microprocessors And Microcontrollers MCQ AssignmentDocument8 pagesMicroprocessors And Microcontrollers MCQ Assignmentsoumya sekhar mahantiNo ratings yet
- Scada ReportDocument29 pagesScada Reportkiswah computersNo ratings yet
- An Empirical Assessment of Service Quality and Customers Preference of Cellular Service Providers in NepalDocument15 pagesAn Empirical Assessment of Service Quality and Customers Preference of Cellular Service Providers in NepalIJEID :: www.ijeid.comNo ratings yet
- Automatic Generation ControlDocument12 pagesAutomatic Generation ControlTitipong PulbunrojNo ratings yet
- EHV AC and DC Transmission SystemsDocument1 pageEHV AC and DC Transmission SystemsshreyaNo ratings yet
- Module 1 - Control Systems - 18EE61Document22 pagesModule 1 - Control Systems - 18EE61Shreyas KanabaragiNo ratings yet
- ICEES 2023 - Paper Presentation ScheduleDocument15 pagesICEES 2023 - Paper Presentation ScheduleDr.Gopinath ChidambaramNo ratings yet
- Class PDF 516 QuestionDocument80 pagesClass PDF 516 QuestionRahul KashyapNo ratings yet
- Power Electronics 2012-13 ProjectsDocument19 pagesPower Electronics 2012-13 Projectsncctprojects3231100% (1)
- RF and Microwave Engineering Course SyllabusDocument167 pagesRF and Microwave Engineering Course SyllabusSrinidhi SankarNo ratings yet
- Self Balancing Robot Project ReportDocument40 pagesSelf Balancing Robot Project ReportSpark KnightNo ratings yet
- Data Logger For Photovoltaic Monitoring SystemDocument75 pagesData Logger For Photovoltaic Monitoring SystemLIEW HUI FANG UNIMAPNo ratings yet
- Railtel Corporation of India LTD: Developing Marketing Strategy ForDocument54 pagesRailtel Corporation of India LTD: Developing Marketing Strategy ForSanjai KumarNo ratings yet
- Embedded Systems - NotesDocument30 pagesEmbedded Systems - NotesBruce LeeNo ratings yet
- Symmetrical Fault Analysis in Power SystemsDocument14 pagesSymmetrical Fault Analysis in Power Systemsstudents answerNo ratings yet
- Nonlinear Predictive Control of A Benchmark CSTRDocument6 pagesNonlinear Predictive Control of A Benchmark CSTRRohan LakhaniNo ratings yet
- Stability and Control-Annurev 2022 PDFDocument30 pagesStability and Control-Annurev 2022 PDFJose ValdiviesoNo ratings yet
- Electric Power Load Analysis for Surface ShipsDocument46 pagesElectric Power Load Analysis for Surface ShipsLincoln RibeiroNo ratings yet
- Det10013 CHPTR 2Document36 pagesDet10013 CHPTR 2Budak TbrNo ratings yet
- OC & SC Test On 1-Phase TransformerDocument5 pagesOC & SC Test On 1-Phase TransformerChaitanyavaddigalaNo ratings yet
- GK Now Current Affairs - February 2023 One Liner Monthly Current AffairsDocument133 pagesGK Now Current Affairs - February 2023 One Liner Monthly Current Affairsviknesh waranNo ratings yet
- Load CellDocument9 pagesLoad Celladalberto soplatetasNo ratings yet
- 2 - 7 Multiprocessor ConfigurationsDocument15 pages2 - 7 Multiprocessor ConfigurationsrakkkkNo ratings yet
- Review of Impedance-Reshaping-Based Power Sharing Strategies in Islanded AC Microgrids PDFDocument16 pagesReview of Impedance-Reshaping-Based Power Sharing Strategies in Islanded AC Microgrids PDF张明No ratings yet
- Req 650Document96 pagesReq 650firoj malikNo ratings yet
- Micro 131L Lab Experiment 12 13 Servo and Stepper Motor in Arduino BoardDocument23 pagesMicro 131L Lab Experiment 12 13 Servo and Stepper Motor in Arduino BoardELLAINE DE CLARONo ratings yet
- A Novel AC To AC Wireless Power Transfer SystemDocument6 pagesA Novel AC To AC Wireless Power Transfer Systemarunkumarmurugesan88No ratings yet
- UPPCL uses microwave system for SLDC data transmissionDocument49 pagesUPPCL uses microwave system for SLDC data transmissionAnkur PrasadNo ratings yet
- Technologies: Research and Application of A SCADA System For A MicrogridDocument11 pagesTechnologies: Research and Application of A SCADA System For A MicrogridDave KevinNo ratings yet
- ETE 22628 Question Bank-UT1: Sr. No. Option 1 Option 2 Option 3 Oprtion 4 Answer KeyDocument6 pagesETE 22628 Question Bank-UT1: Sr. No. Option 1 Option 2 Option 3 Oprtion 4 Answer KeyAditya Panvalkar APNo ratings yet
- Bloch TheoremDocument14 pagesBloch TheoremSruthi ShineyNo ratings yet
- Sar AdcDocument9 pagesSar AdcNagarajNo ratings yet
- Digital ElectronicsDocument169 pagesDigital ElectronicsParthNo ratings yet
- Value Added Tax (Amendment) Bill, 2023Document10 pagesValue Added Tax (Amendment) Bill, 2023Frank WadidiNo ratings yet
- Environmental Studies-18CIV59 3 IA-Question BankDocument5 pagesEnvironmental Studies-18CIV59 3 IA-Question Bank1AP18CS037 Shirish KulkarniNo ratings yet
- Renewable Energy in Malaysia: Solar is the WayDocument3 pagesRenewable Energy in Malaysia: Solar is the WayMuhammad Sharir100% (1)
- Types of WIRESDocument7 pagesTypes of WIRESshadowsama100% (1)
- Optimal Power Flow Using Genetic AlgorithmDocument6 pagesOptimal Power Flow Using Genetic AlgorithminesNo ratings yet
- Development of The Control and Automation System For Mini Hydro TurbinesDocument122 pagesDevelopment of The Control and Automation System For Mini Hydro TurbinesKristijan HorvatNo ratings yet
- Campus Recruitment Management System (CRMSDocument96 pagesCampus Recruitment Management System (CRMSsagarNo ratings yet
- Kirchhoff Law (P)Document18 pagesKirchhoff Law (P)Iam strange100% (2)
- Frenzel CommunicationDocument23 pagesFrenzel CommunicationMayline Mae CañeteNo ratings yet
- Electrical Circuit Analysis and Network SynthesisDocument13 pagesElectrical Circuit Analysis and Network SynthesisPallav sahNo ratings yet
- Parameters Affecting The Back Ashover Voltage Across The Overhead Transmission Line Insulator Caused by LightningDocument7 pagesParameters Affecting The Back Ashover Voltage Across The Overhead Transmission Line Insulator Caused by LightningSafeer HussainNo ratings yet
- Uttarakhand Grid CodeDocument71 pagesUttarakhand Grid Codecrazy devilNo ratings yet
- Unified Real Time Data State MeasurementDocument5 pagesUnified Real Time Data State MeasurementAnonymous zzMfpoBxNo ratings yet
- Critical Clearing Angle Calculation for Generator Delivering Power Pre-, During, and Post-FaultDocument16 pagesCritical Clearing Angle Calculation for Generator Delivering Power Pre-, During, and Post-FaultGill LuNo ratings yet
- Questions Electrical Machines IDocument47 pagesQuestions Electrical Machines IJerome JeremiasNo ratings yet
- Outage Analysis and Power Allocation For2018Document6 pagesOutage Analysis and Power Allocation For2018abla bedouiNo ratings yet
- Ashwin Pillai M & M Lab FileDocument24 pagesAshwin Pillai M & M Lab FileSUKRIT SAHUNo ratings yet
- Computer system servicing examDocument3 pagesComputer system servicing examJohn Jessie Cuachon ValeroNo ratings yet
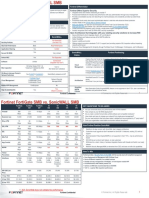
- Fortinet SMB Vs SonicWALL TZ Series - Talking PointsDocument2 pagesFortinet SMB Vs SonicWALL TZ Series - Talking PointsMonNo ratings yet
- Amplitude ModulationDocument89 pagesAmplitude Modulationelyk herreraNo ratings yet
- Linear/Multiple Regression: Application & Sample Problems Coefficient of DeterminationDocument17 pagesLinear/Multiple Regression: Application & Sample Problems Coefficient of Determinationanderson100% (1)
- Mayank Agrawal BBPDocument10 pagesMayank Agrawal BBPIshika JainNo ratings yet
- Touchngo History Statement 20032023-18062023Document4 pagesTouchngo History Statement 20032023-18062023Hackster LimNo ratings yet
- Prestressed Concrete PolesDocument3 pagesPrestressed Concrete PolesIon Riswan SinagaNo ratings yet
- Draw wiring diagram in Orcad CaptureDocument28 pagesDraw wiring diagram in Orcad CapturedanyNo ratings yet
- Study of IT Systems at Ashok LeylandDocument3 pagesStudy of IT Systems at Ashok LeylandSiddhant SalilNo ratings yet
- StoryresposeindiaDocument34 pagesStoryresposeindiaWalter ponciniNo ratings yet
- Heavy Saddle ClampsDocument1 pageHeavy Saddle ClampsSudarshan KaragudariNo ratings yet
- EXCAVATOR CAT 330D2L SpecalogDocument32 pagesEXCAVATOR CAT 330D2L Specalogganendra santantika100% (1)
- 100 MCQ Questions For Operating Systems MCQ Sets PDFDocument29 pages100 MCQ Questions For Operating Systems MCQ Sets PDFghodkeshital291150% (4)
- Paper Zinnia Flower Template PDF by JenniferCarrollDocument2 pagesPaper Zinnia Flower Template PDF by JenniferCarrollmariaNo ratings yet
- Technical - STWS-ECS-FCU-103 AND 104Document1 pageTechnical - STWS-ECS-FCU-103 AND 104Prakash RaoNo ratings yet
- ABB RMU Tech SpecificationDocument4 pagesABB RMU Tech SpecificationJuned HamzaviNo ratings yet
- Welding of P91Document37 pagesWelding of P91nishant361100% (4)
- Math108x Doc CHECKPOINTpredictionsDocument2 pagesMath108x Doc CHECKPOINTpredictionsJackson LumbasioNo ratings yet
- Contoh InvoiceDocument2 pagesContoh InvoiceLinda RizkaNo ratings yet
- Run WordcountDocument3 pagesRun WordcountKhushi PatilNo ratings yet
- Ukpsc Ae 2023 Admit CardDocument2 pagesUkpsc Ae 2023 Admit CardChetan ChauhanNo ratings yet
- Dana TE13/17 transmission maintenance manualDocument16 pagesDana TE13/17 transmission maintenance manualMohamed El Gamal100% (1)
- Fee Structure Btech CseDocument1 pageFee Structure Btech Cseankit panwarNo ratings yet
- Juan Carlos Rodriguez Jimenez C.C 79.786.948 Industrial Engineer, MBA Spe. Computerize Industry and SimulationDocument3 pagesJuan Carlos Rodriguez Jimenez C.C 79.786.948 Industrial Engineer, MBA Spe. Computerize Industry and SimulationPaula TamayoNo ratings yet
- Isf DF10KDocument1 pageIsf DF10KManh PhamNo ratings yet
- Unit 8Document4 pagesUnit 8Bảo VũNo ratings yet
- OP07x Precision Operational Amplifiers: 1 Features 3 DescriptionDocument22 pagesOP07x Precision Operational Amplifiers: 1 Features 3 DescriptionВиктор ШереметNo ratings yet
- Contractors Electrical WebpageDocument4 pagesContractors Electrical WebpageJAGUAR GAMINGNo ratings yet
- DB Bluelog XM XC enDocument3 pagesDB Bluelog XM XC enKarim BouissNo ratings yet
- RESEARCH REVIEWER 2nd GRADINGDocument13 pagesRESEARCH REVIEWER 2nd GRADINGAngelica AlfonsoNo ratings yet