You might also like
- AN930A - J1939 C Library For CAN-Enabled PICmicro PDFDocument28 pagesAN930A - J1939 C Library For CAN-Enabled PICmicro PDFCarlos Eduardo Caparroz DuarteNo ratings yet
- Joshua Jose Castromayor 5.4.5 Lab Determine The MAC Address of A Host AnsweredDocument3 pagesJoshua Jose Castromayor 5.4.5 Lab Determine The MAC Address of A Host AnsweredJoshua CastromayorNo ratings yet
- Visual Basic Communications #1Document5 pagesVisual Basic Communications #1rukati shojaNo ratings yet
- Premier 300Document11 pagesPremier 300Yusuf Khan0% (1)
- 7.1.6 Lab - Use Wireshark To Examine Ethernet FramesDocument13 pages7.1.6 Lab - Use Wireshark To Examine Ethernet Frameskrishnveer12No ratings yet
- 4.1.2.10 Lab - Introduction To WiresharkDocument7 pages4.1.2.10 Lab - Introduction To WiresharkBilal Khan100% (1)
- Assignment 2Document6 pagesAssignment 2Abdul Ahad SaeedNo ratings yet
- 5.1.2.8 Lab - Viewing Network Device MAC AddressesDocument5 pages5.1.2.8 Lab - Viewing Network Device MAC Addresseschristian hallNo ratings yet
- 7.2.7 Lab - View Network Device MAC Addresses - ILMDocument8 pages7.2.7 Lab - View Network Device MAC Addresses - ILMMariano PereyraNo ratings yet
- 5.1.1.7 Lab - Using Wireshark To Examine Ethernet FramesDocument9 pages5.1.1.7 Lab - Using Wireshark To Examine Ethernet FramesAlex Box0% (1)
- 7.1.6 Lab - Use Wireshark To Examine Ethernet FramesDocument10 pages7.1.6 Lab - Use Wireshark To Examine Ethernet FramesNuraiym NetullinaNo ratings yet
- 5.3.7 Lab - Introduction To Wireshark - Es XLDocument13 pages5.3.7 Lab - Introduction To Wireshark - Es XLJeelon MTNo ratings yet
- MIP Lab03Document21 pagesMIP Lab03Usman janNo ratings yet
- TCP IpDocument22 pagesTCP IpCentaur ArcherNo ratings yet
- Laporan Praktikum Jaringan KomputerDocument9 pagesLaporan Praktikum Jaringan KomputerSalimulhadiNo ratings yet
- 4.1.2.10 Lab - Introduction To Wireshark-NAVALDocument6 pages4.1.2.10 Lab - Introduction To Wireshark-NAVALCarlo NavalNo ratings yet
- 4.6.2.7 Lab - Using Wireshark To Examine A UDP DNS Capture-NAVALDocument7 pages4.6.2.7 Lab - Using Wireshark To Examine A UDP DNS Capture-NAVALCarlo NavalNo ratings yet
- Comp, Comp1, Comp2 and Comp3 in CobolDocument3 pagesComp, Comp1, Comp2 and Comp3 in CobolVidyaNo ratings yet
- Assignment Cs349 WiresharkDocument8 pagesAssignment Cs349 WiresharkRitvik SarafNo ratings yet
- hc12 Asm 1 PDFDocument33 pageshc12 Asm 1 PDFJao Aglibut100% (1)
- Sesión Práctica 04 - Observar La MAC de Un Dispositivo en RedDocument6 pagesSesión Práctica 04 - Observar La MAC de Un Dispositivo en RedAndy Marcelo JaicoNo ratings yet
- Comp, Comp1, Comp2 and Comp3 in CobolDocument3 pagesComp, Comp1, Comp2 and Comp3 in CobolVidyaNo ratings yet
- Assessment System: Take Assessment - Enetwork Chapter 9 - Ccna Exploration: Network Fundamentals (Version 4.0)Document10 pagesAssessment System: Take Assessment - Enetwork Chapter 9 - Ccna Exploration: Network Fundamentals (Version 4.0)BushBungaloNo ratings yet
- J1939 Line in Modbus Master Modbus Slave MTU Slave NMEA Listener NMEA Talker OPC Client Simulation System IO Tank Calculation Tcp/Ip TTPDocument125 pagesJ1939 Line in Modbus Master Modbus Slave MTU Slave NMEA Listener NMEA Talker OPC Client Simulation System IO Tank Calculation Tcp/Ip TTPBruno SilvaNo ratings yet
- Performance Comparison of B.A.T.M.A.Nd and B.A.T.M.A.N-advDocument2 pagesPerformance Comparison of B.A.T.M.A.Nd and B.A.T.M.A.N-advPhu TranNo ratings yet
- Training On Pasolink Network Management System (Java Version)Document64 pagesTraining On Pasolink Network Management System (Java Version)Iftikhar Ahmad AhmadNo ratings yet
- 3.7.10 Lab - Use Wireshark To View Network Traffic: TopologyDocument8 pages3.7.10 Lab - Use Wireshark To View Network Traffic: TopologyestebanNo ratings yet
- 5.1.4.3 Lab - Using Wireshark To Examine Ethernet FramesDocument7 pages5.1.4.3 Lab - Using Wireshark To Examine Ethernet FramesBenjamin Gm100% (4)
- Omni FCDocument11 pagesOmni FCsyed jeelani ahmedNo ratings yet
- CAN Based SimulatorDocument6 pagesCAN Based SimulatorMarcelo QuispeNo ratings yet
- Lab - Use Wireshark To View Network TrafficDocument6 pagesLab - Use Wireshark To View Network TrafficAyeyi Mills-RobertsonNo ratings yet
- An 3Document6 pagesAn 3Carlos H. GojleviciusNo ratings yet
- Modbus RTU - ASCII Master Manual 8 - Simply Modbus SoftwareDocument11 pagesModbus RTU - ASCII Master Manual 8 - Simply Modbus SoftwareSaber LeffiNo ratings yet
- Data Retrofit Steps For Lag:: 1. Login On LAG. 2. Shutdown LAG. 3. Remove Shared MemoryDocument10 pagesData Retrofit Steps For Lag:: 1. Login On LAG. 2. Shutdown LAG. 3. Remove Shared MemorySurjeet SinghNo ratings yet
- CYT115 Lab 4 Lab - Install Wireshark and Examine Captured PacketsDocument14 pagesCYT115 Lab 4 Lab - Install Wireshark and Examine Captured PacketsNagendra babu PittuNo ratings yet
- ICMP MisbehaviourDocument34 pagesICMP Misbehavioural-amin shohag100% (1)
- Lab - Introduction To Wireshark: Mininet TopologyDocument8 pagesLab - Introduction To Wireshark: Mininet Topologyelga wandraNo ratings yet
- Model Test-2: 1. Prove That NAND GATE and NOR GATE Is Universal GateDocument20 pagesModel Test-2: 1. Prove That NAND GATE and NOR GATE Is Universal GateAlamgir HossainNo ratings yet
- 6 Melihat Trafik Data Menggunakan WiresharkDocument16 pages6 Melihat Trafik Data Menggunakan WiresharkTrioNo ratings yet
- Shree Ramchandra College of Engineering: Lab ManualDocument64 pagesShree Ramchandra College of Engineering: Lab ManualTrang NguyễnNo ratings yet
- 7.2.7 Lab - View Network Device Mac AddressesDocument8 pages7.2.7 Lab - View Network Device Mac AddressesAnaNo ratings yet
- Block I Apollo Guidance Computer (AGC) : How To Build One in Your BasementDocument20 pagesBlock I Apollo Guidance Computer (AGC) : How To Build One in Your BasementpabloNo ratings yet
- 3.7.10 Lab - Use Wireshark To View Network TrafficDocument7 pages3.7.10 Lab - Use Wireshark To View Network TrafficPham Quang Huy (K16HL)No ratings yet
- 7.2.7 Lab4 - View Network Device MAC AddressesDocument9 pages7.2.7 Lab4 - View Network Device MAC AddressesPham Quang Huy (K16HL)No ratings yet
- MP ProjectDocument102 pagesMP ProjectHusain AhamedNo ratings yet
- CN Lab Manual-1Document71 pagesCN Lab Manual-1Sakthidevi BalakumarNo ratings yet
- Winsock Networking Tutorial (C++)Document46 pagesWinsock Networking Tutorial (C++)river_11576100% (1)
- 7.1.6 Lab4 - Use Wireshark To Examine Ethernet FramesDocument8 pages7.1.6 Lab4 - Use Wireshark To Examine Ethernet FramesPham Quang Huy (K16HL)No ratings yet
- Getting Started: Creating A Simple Siemens MPI Protocol ApplicationDocument24 pagesGetting Started: Creating A Simple Siemens MPI Protocol ApplicationsaravananNo ratings yet
- 7.2.7 Lab - View Network Device MAC Addresses - ILMDocument9 pages7.2.7 Lab - View Network Device MAC Addresses - ILMvishnu Prasad GoranthalaNo ratings yet
- Lab - Using Wireshark To View Network Traffic: TopologyDocument18 pagesLab - Using Wireshark To View Network Traffic: TopologyAstika IstiningrumNo ratings yet
- CCNA3 Lab PT VLSM1Document5 pagesCCNA3 Lab PT VLSM1Arsalan KhanNo ratings yet
- The Error Correcting Codes (ECC) Page: Welcome!Document9 pagesThe Error Correcting Codes (ECC) Page: Welcome!ARJUNARCHANANo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- NES Architecture: Architecture of Consoles: A Practical Analysis, #1From EverandNES Architecture: Architecture of Consoles: A Practical Analysis, #1Rating: 5 out of 5 stars5/5 (1)
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- PC Engine / TurboGrafx-16 Architecture: Architecture of Consoles: A Practical Analysis, #16From EverandPC Engine / TurboGrafx-16 Architecture: Architecture of Consoles: A Practical Analysis, #16No ratings yet
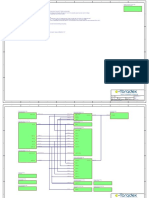
- Revision History: Hardware Architecture Schematic Page Hardwarearchitecture - SchdocDocument17 pagesRevision History: Hardware Architecture Schematic Page Hardwarearchitecture - SchdocGuilherme Pigato PaesNo ratings yet
- PIC Based CAN (SAE-J1939) SimulatorDocument35 pagesPIC Based CAN (SAE-J1939) SimulatorGuilherme Pigato PaesNo ratings yet
- Part Number Description Manufacturer Manufacturer Part Number Component Designators Component CountDocument2 pagesPart Number Description Manufacturer Manufacturer Part Number Component Designators Component CountGuilherme Pigato PaesNo ratings yet
- Microchip Support - J1939, CANopen, ISO 15765Document1 pageMicrochip Support - J1939, CANopen, ISO 15765Guilherme Pigato PaesNo ratings yet
- Seminário Embarcados 2014 - What You Can Do Digital Filtering With An MCU - Hueliquis FernandesDocument47 pagesSeminário Embarcados 2014 - What You Can Do Digital Filtering With An MCU - Hueliquis FernandesGuilherme Pigato PaesNo ratings yet
- ArduinoDay2015 - Workshop Arduino - Igor TavaresDocument25 pagesArduinoDay2015 - Workshop Arduino - Igor TavaresGuilherme Pigato PaesNo ratings yet
- Zonal-Architecture-White-Paper (Tendencias Automotrices)Document24 pagesZonal-Architecture-White-Paper (Tendencias Automotrices)JESUS JUAREZ PEÑUELANo ratings yet
- SSP 272 d1Document64 pagesSSP 272 d1attilakissNo ratings yet
- Road Load DataDocument146 pagesRoad Load DataacroloidNo ratings yet
- USBDLA User Guide V1.0Document18 pagesUSBDLA User Guide V1.0morusNo ratings yet
- Electronic Control Units (Ecus) : Can Bus OutputDocument8 pagesElectronic Control Units (Ecus) : Can Bus OutputAmine HerbacheNo ratings yet
- UDS Protocol Implementation in An ECUDocument6 pagesUDS Protocol Implementation in An ECULayon Bruno100% (4)
- Standard22NX Gyro CompassDocument8 pagesStandard22NX Gyro CompassСерёжа НоурNo ratings yet
- Audi A4 No. 6 / 1: Convenience ElectricsDocument27 pagesAudi A4 No. 6 / 1: Convenience ElectricsmbpajaNo ratings yet
- PLUS+1® Compliant: OX024-x10 Function BlockDocument16 pagesPLUS+1® Compliant: OX024-x10 Function BlockGuima_df100% (1)
- Failure Codes Fendt 900 Vario 09 2007Document201 pagesFailure Codes Fendt 900 Vario 09 2007madscout71% (7)
- Error Code Table: Iflex2 (C Structure)Document9 pagesError Code Table: Iflex2 (C Structure)Miguel HernandezNo ratings yet
- Errores Can BusDocument11 pagesErrores Can BusSabrina WeaverNo ratings yet
- Shunt Current Sensor IVT-MODDocument9 pagesShunt Current Sensor IVT-MODSaurabh BhaleraoNo ratings yet
- Eltorque User ManualDocument29 pagesEltorque User Manualdhlinva3205No ratings yet
- MAN MMDS Interfacing PDFDocument3 pagesMAN MMDS Interfacing PDFAlbertoJim90100% (1)
- Conrad RX63N Advanced PDFDocument356 pagesConrad RX63N Advanced PDFraghulNo ratings yet
- Usersmanual TCS WKK015CDocument53 pagesUsersmanual TCS WKK015CDraganNo ratings yet
- Module 2Document11 pagesModule 2suresh mariappanNo ratings yet
- Vehicle To Vehicle CommunicationsDocument4 pagesVehicle To Vehicle CommunicationsRudraksh HaranNo ratings yet
- CCL-S / CCT / CCL-P: Programming AND Installation ManualDocument5 pagesCCL-S / CCT / CCL-P: Programming AND Installation ManualyounesNo ratings yet
- Can & MCP2515Document31 pagesCan & MCP2515Ovidiu CiobanuNo ratings yet
- Technical Information Manual: 12 January 2010 Revision n.2Document33 pagesTechnical Information Manual: 12 January 2010 Revision n.2bhooNo ratings yet
- Iqan-Xa2 Instruction Book: Publ No HY33-8385-IB/UK Edition 2016-12-16Document39 pagesIqan-Xa2 Instruction Book: Publ No HY33-8385-IB/UK Edition 2016-12-16feukamNo ratings yet
- User's Guide Smartpack2 Basic ControllerDocument16 pagesUser's Guide Smartpack2 Basic Controllernikhom_dk1565No ratings yet
- Yanmar CANplus 600 Operation and Troubleshooting PDFDocument40 pagesYanmar CANplus 600 Operation and Troubleshooting PDFJozefNo ratings yet
- Sevcon PowerpaK (SEM & MicropaK) Manual - With Calibrator SectionDocument60 pagesSevcon PowerpaK (SEM & MicropaK) Manual - With Calibrator SectionKrishna KhandigeNo ratings yet
- Lxm23A Canopen: Fieldbus Protocol For Servo Drive Fieldbus ManualDocument120 pagesLxm23A Canopen: Fieldbus Protocol For Servo Drive Fieldbus Manualabolqassem fakherNo ratings yet
- Hamiltonjet hm521 Fault Codes PDFDocument30 pagesHamiltonjet hm521 Fault Codes PDFali delavarNo ratings yet
- PowerpaK Series Controller Rev GDocument51 pagesPowerpaK Series Controller Rev GsilvaroneNo ratings yet
- DBW 4 ManualDocument21 pagesDBW 4 ManualsilverfrostlscNo ratings yet