You might also like
- AMD 5k86 ProcDocument10 pagesAMD 5k86 Procatorresh090675No ratings yet
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- MCC - PANEL - Start - Delta - StarterDocument1 pageMCC - PANEL - Start - Delta - StarterRagothamanNo ratings yet
- EiffelST SCHDocument1 pageEiffelST SCHskyddNo ratings yet
- Solar Cell I-V Cuk ConverterDocument1 pageSolar Cell I-V Cuk ConverterKORAKRIT ANANTA-AUOYPORNNo ratings yet
- Catalex-Micro-SD-Card-Module-SCH ModificadoDocument1 pageCatalex-Micro-SD-Card-Module-SCH ModificadoBabobrillNo ratings yet
- AVR-RISC Evaluation System (1) : Experiment With Atmel's Latest RISC ProcessorsDocument5 pagesAVR-RISC Evaluation System (1) : Experiment With Atmel's Latest RISC ProcessorsSanedrac AcNo ratings yet
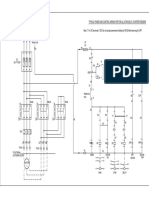
- TVC-03 - T - 05695 - 3 - Scheme of RTCC PDFDocument11 pagesTVC-03 - T - 05695 - 3 - Scheme of RTCC PDFADE MRTNo ratings yet
- Probador rj45Document1 pageProbador rj45Manuel Rivas100% (2)
- Probador rj45Document1 pageProbador rj45Manuel Rivas100% (1)
- SparkFun Serial Basic CH340 v10Document1 pageSparkFun Serial Basic CH340 v10Muhammad AlifNo ratings yet
- Power Extra (Prototyping) Nrf24l01+ Radio Module: Title: EASY/Newbie PCB Nrf24 EditionDocument1 pagePower Extra (Prototyping) Nrf24l01+ Radio Module: Title: EASY/Newbie PCB Nrf24 EditionLorensius LondaNo ratings yet
- Title:: File: Sample & Hold - LPF - SCH SheetDocument1 pageTitle:: File: Sample & Hold - LPF - SCH SheetMochammad PraditiaNo ratings yet
- Some Simple Tachometer Input Circuits: SteveDocument3 pagesSome Simple Tachometer Input Circuits: SteveSơn PhạmNo ratings yet
- Schematic - PRIMER PROYECTO REAL - 2021-10-01Document1 pageSchematic - PRIMER PROYECTO REAL - 2021-10-01bossfp36No ratings yet
- Manual Winpic800Document1 pageManual Winpic800Igor Babiy100% (2)
- 74HC164 74HCT164: 1. General DescriptionDocument16 pages74HC164 74HCT164: 1. General DescriptionteomondoNo ratings yet
- BLDC Driver SCHDocument1 pageBLDC Driver SCHadi joko100% (1)
- Introduction To FPGA HSIODocument30 pagesIntroduction To FPGA HSIOvineeth chowdaryNo ratings yet
- Minivna SchematicDocument8 pagesMinivna SchematicWenda WidodoNo ratings yet
- Shbootmode 1Document1 pageShbootmode 1Teguh PriyonoNo ratings yet
- Implementation of FOC Algorithm Using FPGA For GaN-based Three Phase Induction Motor DriveDocument10 pagesImplementation of FOC Algorithm Using FPGA For GaN-based Three Phase Induction Motor DrivenamduongqnNo ratings yet
- PICPROGDocument8 pagesPICPROGfrankcorbet100% (4)
- Curtis1238 Programmer v1rc DIY PDFDocument1 pageCurtis1238 Programmer v1rc DIY PDFPedro Militao CoboNo ratings yet
- SB2040 SchematicDocument1 pageSB2040 Schematiccacalot93100% (1)
- Toshiba Laptop Schematic Diagram PDFDocument37 pagesToshiba Laptop Schematic Diagram PDFRamdas Kamble100% (2)
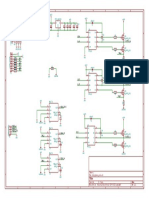
- Interface Carte Nucleo - STM32F446RE Potentiomètres: PC1 PC0Document1 pageInterface Carte Nucleo - STM32F446RE Potentiomètres: PC1 PC0Abdessamad houssainiNo ratings yet
- Tutorial Sheet - 3 2020Document2 pagesTutorial Sheet - 3 2020guddu guptaNo ratings yet
- Tutorial Sheet - 3 2020Document2 pagesTutorial Sheet - 3 2020guddu guptaNo ratings yet
- Schematic AT89S52 V3 NewDocument1 pageSchematic AT89S52 V3 NewLhthang KtvNo ratings yet
- C1 1Pps - Out - Se: Rev: Title: Document Number: Siu-Clock-BreakoutDocument1 pageC1 1Pps - Out - Se: Rev: Title: Document Number: Siu-Clock-BreakoutHuzz100% (1)
- DVD Noblex Dvd-1350: 3828 Control Borad SechmaticDocument15 pagesDVD Noblex Dvd-1350: 3828 Control Borad SechmaticMariano Ohienart100% (1)
- SchematicDocument1 pageSchematicDavid TorresNo ratings yet
- Schematic New Sentinel 2024-02-16Document1 pageSchematic New Sentinel 2024-02-16Khánh TrịnhNo ratings yet
- Schematic Rain Drop Light 2023-11-04Document1 pageSchematic Rain Drop Light 2023-11-04Daniel PerezNo ratings yet
- 3DB20024CAAATNZZA04 - V1 - 9500 MPR MPT-HC-HQAMXP-HQAMMC Quick Start GuideDocument2 pages3DB20024CAAATNZZA04 - V1 - 9500 MPR MPT-HC-HQAMXP-HQAMMC Quick Start GuideWalcemir AguiarNo ratings yet
- Pci 1603Document1 pagePci 1603DGPCTCNo ratings yet
- Elektor BusDocument6 pagesElektor BusFernando VidalNo ratings yet
- TPS3839G33DBZR U3 U1: Low PowerDocument1 pageTPS3839G33DBZR U3 U1: Low Powermarcoteran007No ratings yet
- DIY Particle Detector Schematic v1-2Document1 pageDIY Particle Detector Schematic v1-2Rafael Carmo100% (1)
- PDF Created With Fineprint Pdffactory Pro Trial VersionDocument1 pagePDF Created With Fineprint Pdffactory Pro Trial VersionJusetf ArteagaNo ratings yet
- PDF Created With Fineprint Pdffactory Pro Trial VersionDocument1 pagePDF Created With Fineprint Pdffactory Pro Trial VersionAndyNo ratings yet
- MPR Quick Start Guide For Powering and Installation 3db20024caaatnzza Ics01Document2 pagesMPR Quick Start Guide For Powering and Installation 3db20024caaatnzza Ics01Omar sameerNo ratings yet
- Bluetooth Home Prototype AutomationDocument1 pageBluetooth Home Prototype AutomationAvanish Srivastava100% (2)
- Battery PointDocument1 pageBattery Pointapi-3730505No ratings yet
- DC AC: DC Junction Box Top Bmu EMSDocument1 pageDC AC: DC Junction Box Top Bmu EMSJorge Enrrique Gomez MedinaNo ratings yet
- Lso Lan PDFDocument1 pageLso Lan PDFLê HiếuNo ratings yet
- Sony DVD Photodetector DatasheetDocument3 pagesSony DVD Photodetector DatasheetAditya Chowdary KasukurtiNo ratings yet
- FC-7688 User ManualDocument55 pagesFC-7688 User ManualTarek GARA100% (1)
- Mp4 ATJ2085 SchematicDocument1 pageMp4 ATJ2085 SchematicSneetsher Crispy100% (17)
- Memo Plus (MP 9300-0.9) 10-20KDocument32 pagesMemo Plus (MP 9300-0.9) 10-20KAbdelwhab ElsaftyNo ratings yet
- CKT 8Document1 pageCKT 8Juan Luis Hernandez CarrizalesNo ratings yet
- Blank: V1.2 1. Page27: Change RT9237 To RT9248 2. Page25: Add U39Document30 pagesBlank: V1.2 1. Page27: Change RT9237 To RT9248 2. Page25: Add U39eclothstoreNo ratings yet
- En 1997 11Document106 pagesEn 1997 11franciscocampoverde8224No ratings yet
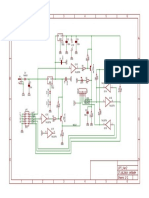
- Lovepedal Purple Plexi 800Document1 pageLovepedal Purple Plexi 800Shibbit100% (1)
- Microcontroller Basics CourseDocument5 pagesMicrocontroller Basics CourseMikko FagerlundNo ratings yet
- Microcontroller Bootcamp (3) : Serial Interface and A/D ConverterDocument10 pagesMicrocontroller Bootcamp (3) : Serial Interface and A/D ConverterMikko FagerlundNo ratings yet
- 2 PDFDocument8 pages2 PDFMikko FagerlundNo ratings yet
- Microcontroller Bootcamp (5) : Using TimersDocument10 pagesMicrocontroller Bootcamp (5) : Using TimersMikko FagerlundNo ratings yet
- Microcontroller Bootcamp (7) : The I C BusDocument8 pagesMicrocontroller Bootcamp (7) : The I C BusMikko FagerlundNo ratings yet
- LM2907 and LM2917 Frequency To Voltage Converter: 1 Features 3 DescriptionDocument42 pagesLM2907 and LM2917 Frequency To Voltage Converter: 1 Features 3 Descriptioncontrol tejidoNo ratings yet
- WLP Physics 2Document4 pagesWLP Physics 2RenlieLegaspiNo ratings yet
- Basics of Thermal Resistance and Heat Dissipation An-EDocument6 pagesBasics of Thermal Resistance and Heat Dissipation An-ERahul RaiNo ratings yet
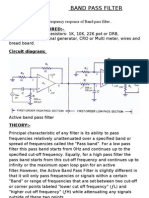
- Band Pass FilterDocument3 pagesBand Pass FilterShruti MathurNo ratings yet
- 1600KVA ស្វាយជ្រុំRMU, LVDBDocument4 pages1600KVA ស្វាយជ្រុំRMU, LVDBmain mydriveNo ratings yet
- DE-6-India BixDocument21 pagesDE-6-India BixbhagNo ratings yet
- Lecture 02Document25 pagesLecture 02Atika Mustari SamiNo ratings yet
- Experimental Study of Voltage Distribution Along String Insulator BYDocument14 pagesExperimental Study of Voltage Distribution Along String Insulator BYmr_mohan321No ratings yet
- Argom Mayo - Junio 2020Document47 pagesArgom Mayo - Junio 2020antonio venturaNo ratings yet
- Hoja de Datos Modulo AXIpremiun BLKDocument2 pagesHoja de Datos Modulo AXIpremiun BLKYoslin RuizNo ratings yet
- Cerberus Pyrotronics Strobes 2 4952870316 2Document2 pagesCerberus Pyrotronics Strobes 2 4952870316 2Rafael DantasNo ratings yet
- NetSure 211 - 20091105Document2 pagesNetSure 211 - 20091105Michell Quiroz OlivaresNo ratings yet
- Activecomp System Catalogue Neptune DucatiDocument2 pagesActivecomp System Catalogue Neptune DucatiMauricio Oropeza CabreraNo ratings yet
- Lightning Arrester: Working Principle, Types and DifferencesDocument7 pagesLightning Arrester: Working Principle, Types and DifferencesNasifNo ratings yet
- MVB enDocument1 pageMVB enferliverpoolNo ratings yet
- E Thyristor1Document6 pagesE Thyristor1jayryapNo ratings yet
- Detector de Movimiento LEGRANDDocument4 pagesDetector de Movimiento LEGRANDDeyvi Vasquez PittmanNo ratings yet
- COURSE OUTLINE Associates Engineering Management TechnologyDocument1 pageCOURSE OUTLINE Associates Engineering Management TechnologyVesselofhonour MontagueNo ratings yet
- Minimum Size Maximum Efficiency: 3-Part Hematology AnalyzerDocument2 pagesMinimum Size Maximum Efficiency: 3-Part Hematology AnalyzerOkura JoshuaNo ratings yet
- Lab ViewDocument13 pagesLab ViewKhadir MohammedNo ratings yet
- Zerner DiodeDocument11 pagesZerner DiodeSaurabh RS100% (1)
- Edc Unit 4 Transistor BiasingDocument19 pagesEdc Unit 4 Transistor BiasingPushpalathaNo ratings yet
- Manuale-Sellaii It-Rev00 Faro SterDocument8 pagesManuale-Sellaii It-Rev00 Faro Steryasser el aliNo ratings yet
- K46 ManualDocument8 pagesK46 ManualDavid KasaiNo ratings yet
- Schneider NS800Document64 pagesSchneider NS800Anonymous Lh3Yh8basINo ratings yet
- CO Unit 1 Chap 1 NotesDocument11 pagesCO Unit 1 Chap 1 NotesAmisha ShettyNo ratings yet
- InteliLite AMF20-25Document2 pagesInteliLite AMF20-25albertooliveira100% (2)
- Everlight Itr20001 T f316 SBDocument10 pagesEverlight Itr20001 T f316 SBmatwan29No ratings yet
- TP Modulation Sous Matlab CorrigéeDocument37 pagesTP Modulation Sous Matlab CorrigéeELmokhtar HamrouniNo ratings yet
- Analyzing Circuits Lab II DLD 2021-2Document7 pagesAnalyzing Circuits Lab II DLD 2021-2octavie ahmedNo ratings yet
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsFrom EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsRating: 5 out of 5 stars5/5 (5)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (229)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)From EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Rating: 5 out of 5 stars5/5 (2)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]From EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Rating: 5 out of 5 stars5/5 (5)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsFrom EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongNo ratings yet
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- CompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102No ratings yet
- How To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsFrom EverandHow To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsNo ratings yet
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideFrom EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideNo ratings yet
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- The User's Directory of Computer NetworksFrom EverandThe User's Directory of Computer NetworksTracy LaqueyNo ratings yet
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionFrom EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionRating: 5 out of 5 stars5/5 (2)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- Debugging Embedded and Real-Time Systems: The Art, Science, Technology, and Tools of Real-Time System DebuggingFrom EverandDebugging Embedded and Real-Time Systems: The Art, Science, Technology, and Tools of Real-Time System DebuggingRating: 5 out of 5 stars5/5 (1)
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsFrom EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsRating: 4.5 out of 5 stars4.5/5 (49)
- Samsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneFrom EverandSamsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneNo ratings yet