You might also like
- Lab ReportDocument10 pagesLab ReportErick OderoNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Experiment 03Document8 pagesExperiment 03Zeynal Abidin ŞabaşNo ratings yet
- Determination of Gear Efficiency Group 2 Lab 4Document13 pagesDetermination of Gear Efficiency Group 2 Lab 4muhammadzariffzakiNo ratings yet
- Francis TurbineDocument12 pagesFrancis TurbinePraveen PagidiNo ratings yet
- Learning Materials For EE 422 L: A Developed Laboratory ManualDocument5 pagesLearning Materials For EE 422 L: A Developed Laboratory ManualArnel Pamaos Lopiba MontañezNo ratings yet
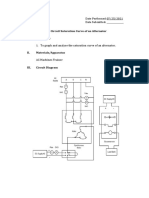
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- Series MotorDocument11 pagesSeries MotorEiz Al.YemaniNo ratings yet
- Experimental Lab No. 1 DC MotorsDocument9 pagesExperimental Lab No. 1 DC MotorscfellowNo ratings yet
- Engineering Lab 5 Machine Lab Lab 1 ReportDocument9 pagesEngineering Lab 5 Machine Lab Lab 1 Reportram010No ratings yet
- DC Motor Transient Response Lab ReportDocument9 pagesDC Motor Transient Response Lab ReportErick OderoNo ratings yet
- Ac Servo Motor LabDocument23 pagesAc Servo Motor LabHardik SharmaNo ratings yet
- Expt 6 The Split Phase MotorDocument4 pagesExpt 6 The Split Phase MotorCapalar KyleNo ratings yet
- Group 4 Experiment 6Document9 pagesGroup 4 Experiment 6Jerome NuevoNo ratings yet
- Motor Calculations PDFDocument8 pagesMotor Calculations PDFheroNo ratings yet
- S5 ManualDocument39 pagesS5 ManualAleena ShajuNo ratings yet
- Remote Lab Experiment Final FileDocument11 pagesRemote Lab Experiment Final FileShiva Kumar RNo ratings yet
- To Determine The Efficiency of A DC Machine by Direct Load TestDocument8 pagesTo Determine The Efficiency of A DC Machine by Direct Load Testdns sNo ratings yet
- Lab 1Document19 pagesLab 1dasdasdNo ratings yet
- Dynamic Analysis of Engine Valvetrain and Its Effects On CamshaftDocument5 pagesDynamic Analysis of Engine Valvetrain and Its Effects On CamshaftIjsrnet EditorialNo ratings yet
- Exp 4Document6 pagesExp 4DHINESH JNo ratings yet
- DC Shunt MotorDocument9 pagesDC Shunt MotorPeterNo ratings yet
- Expt 6 The Cage Rotor Induction MotorDocument5 pagesExpt 6 The Cage Rotor Induction MotorRyan De GuzmanNo ratings yet
- Three Phase Induction MotorDocument6 pagesThree Phase Induction MotorCønstäh Van Der WüppertälärîanskíhNo ratings yet
- Group 9 - Report Assignment 1 - EE2426DDocument10 pagesGroup 9 - Report Assignment 1 - EE2426DNor Zulaika Zafirah AzminNo ratings yet
- Course Code EEE2310 EX-04Document4 pagesCourse Code EEE2310 EX-04Fardin ChowdhuryNo ratings yet
- Measure The Gain Constant of The Output Potentiometer (Volts Per Radian) : Analysis and DiscussionDocument4 pagesMeasure The Gain Constant of The Output Potentiometer (Volts Per Radian) : Analysis and DiscussionNirmal Prasad PantaNo ratings yet
- ME2143-1 Lab ManualDocument10 pagesME2143-1 Lab ManualJoshua ChooNo ratings yet
- DC Shunt MotorDocument9 pagesDC Shunt MotorPeterNo ratings yet
- Lab 3: Control System Design: Part 1: Introduction and ObjectivesDocument13 pagesLab 3: Control System Design: Part 1: Introduction and Objectivesvince kafuaNo ratings yet
- Induction Machines and Synchronous Machines Lab - Cycle 1Document20 pagesInduction Machines and Synchronous Machines Lab - Cycle 1SalmanNo ratings yet
- 8051 Lab Stepper Motor InterfacingDocument5 pages8051 Lab Stepper Motor InterfacingGirish ChapleNo ratings yet
- Experiment No.2: Operation of D.C Motors, Running and ReversingDocument10 pagesExperiment No.2: Operation of D.C Motors, Running and Reversingwrya hussainNo ratings yet
- Open Ended Lab: ObjectivesDocument4 pagesOpen Ended Lab: Objectivesaff123051No ratings yet
- The Hashmite University Electrical Engineering Department Electrical Machines LapDocument6 pagesThe Hashmite University Electrical Engineering Department Electrical Machines LapMohammed AbadiNo ratings yet
- I K S 6 D F S M: Nverse Inematic Olution of A O Erial AnipulatorDocument4 pagesI K S 6 D F S M: Nverse Inematic Olution of A O Erial AnipulatorAbenezer bediluNo ratings yet
- Bahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Document10 pagesBahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Wael M. AbulafiNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Stepper MotorDocument9 pagesStepper MotorHasan Mahmood100% (1)
- If StepDocument23 pagesIf Stepkrishna_cad28No ratings yet
- ECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPDocument8 pagesECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPNunjaNo ratings yet
- Experiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Document6 pagesExperiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Baba YagaNo ratings yet
- Experiment 5Document8 pagesExperiment 5rastgonikoNo ratings yet
- Experiment 3Document6 pagesExperiment 3rastgonikoNo ratings yet
- Course Code EEE2310 EX-04Document4 pagesCourse Code EEE2310 EX-04Fardin ChowdhuryNo ratings yet
- Lab Report DC MotorDocument9 pagesLab Report DC MotorMickey John0% (1)
- Design Lab ReportDocument8 pagesDesign Lab ReportHimanshu BansalNo ratings yet
- ECEN 441-504: Electronic Motor Drive: Lab 3: Operating Characteristics of The Separately Excited DC MotorDocument6 pagesECEN 441-504: Electronic Motor Drive: Lab 3: Operating Characteristics of The Separately Excited DC Motorapi-241454978No ratings yet
- DC Motor Calculations - Calculating Torque - MICROMODocument8 pagesDC Motor Calculations - Calculating Torque - MICROMOaniruthNo ratings yet
- Machine 2 Lab Exp 6Document11 pagesMachine 2 Lab Exp 6Ahmed Bin MustafaNo ratings yet
- NoncompleteDocument8 pagesNoncompleteعمر تاليونNo ratings yet
- Gear Efficiency - DoneDocument11 pagesGear Efficiency - DoneKevin Tan50% (2)
- BME634-Lab1 Separately Excited DC MotorDocument24 pagesBME634-Lab1 Separately Excited DC Motorc24bhrkk6pNo ratings yet
- Second Year Laboratory Report ES2B1-Electric Motors Lab L2: University of WarwickDocument11 pagesSecond Year Laboratory Report ES2B1-Electric Motors Lab L2: University of Warwicksunilas218408No ratings yet
- Faculty of Engineering Department of Aerospace Engineering: Lab InstructorDocument24 pagesFaculty of Engineering Department of Aerospace Engineering: Lab InstructorhishamwahidinNo ratings yet
- DC Motor Lab ReportDocument9 pagesDC Motor Lab ReportErick OderoNo ratings yet
- EEE363 (Exp 2) Study of The Torque Speed Relationship of DC ShuntDocument6 pagesEEE363 (Exp 2) Study of The Torque Speed Relationship of DC Shuntsalad.ass420420No ratings yet
- Winding Analysis of 6 Phase Induction MotorDocument37 pagesWinding Analysis of 6 Phase Induction MotorPranjal Verma100% (2)
- M5 - Inverse Z-Transform PDFDocument41 pagesM5 - Inverse Z-Transform PDFMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- An End-to-End Real-Time Face Identification and Attendance System Using Convolutional Neural NetworksDocument4 pagesAn End-to-End Real-Time Face Identification and Attendance System Using Convolutional Neural NetworksMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- Sample Assignment I Questions PDFDocument4 pagesSample Assignment I Questions PDFMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- Confidential: SESSION 2018/2019Document26 pagesConfidential: SESSION 2018/2019MOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- Attendance System Using Atmega32 PDFDocument15 pagesAttendance System Using Atmega32 PDFMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- Attendance System Using Atmega32 PDFDocument15 pagesAttendance System Using Atmega32 PDFMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- PSR-S700 S900 Lsi CDocument13 pagesPSR-S700 S900 Lsi CAdriano CamocardiNo ratings yet
- Assignment CHAP NO 1.... Computer Fundamentals by PK SinhaDocument7 pagesAssignment CHAP NO 1.... Computer Fundamentals by PK SinhaThreating King100% (2)
- SDLP in Science July 18 2019Document5 pagesSDLP in Science July 18 2019Pinky MarieNo ratings yet
- Dumpy LevelDocument8 pagesDumpy LevelKhiel YumulNo ratings yet
- Laporan Hasil Praktik Bahasa Inggris Dengan Tamu Asing Di Pantai KutaDocument12 pagesLaporan Hasil Praktik Bahasa Inggris Dengan Tamu Asing Di Pantai KutaEnal MegantaraNo ratings yet
- 8-Unit, Low-Saturation Driver: Package Dimensions ApplicationsDocument4 pages8-Unit, Low-Saturation Driver: Package Dimensions ApplicationsTestronicpartsNo ratings yet
- Examination, June/July: ExplainDocument6 pagesExamination, June/July: ExplainSandesh KulalNo ratings yet
- Seminar Report On Hydrogen As The Future FuelDocument63 pagesSeminar Report On Hydrogen As The Future FuelMOHIT MGMNo ratings yet
- Operator PanelDocument11 pagesOperator PanelMostafa AlakhliNo ratings yet
- Radiator - Kts-Sec-Bsdg-Arc-103Document1 pageRadiator - Kts-Sec-Bsdg-Arc-103Mohammed BasheeruddinNo ratings yet
- Tesla in ChinaDocument9 pagesTesla in ChinaÁi Nhân Huỳnh NguyễnNo ratings yet
- Dangote Fertilizer Project NDT Analysis For U/G: Radiographic Test - Ultrasonic TestDocument6 pagesDangote Fertilizer Project NDT Analysis For U/G: Radiographic Test - Ultrasonic Testaakash100% (1)
- Indice Hocberg RheumatologyDocument8 pagesIndice Hocberg RheumatologyGerlando Russo IntroitoNo ratings yet
- Orallichenplanus 170929075918Document40 pagesOrallichenplanus 170929075918Aymen MouradNo ratings yet
- Aircraft Performance NPTELDocument538 pagesAircraft Performance NPTELShabbir Ali100% (2)
- Can Bus ScaniaDocument21 pagesCan Bus Scaniajose breno vieira silva96% (25)
- The Design of Hazard Analysis Critical Control Point (HACCP) Plan For Biscuit PlantDocument7 pagesThe Design of Hazard Analysis Critical Control Point (HACCP) Plan For Biscuit Plantttk_maniNo ratings yet
- Whats New in CADWorx 2019 SP1Document6 pagesWhats New in CADWorx 2019 SP1Juan AliagaNo ratings yet
- Pharmacology Antibiotics: Fluoroquinolone - Chloramphenicol - TetracycllineDocument40 pagesPharmacology Antibiotics: Fluoroquinolone - Chloramphenicol - TetracycllinemluthfidunandNo ratings yet
- Enema Admininstration: Rosanna P. Suva, Man, RNDocument32 pagesEnema Admininstration: Rosanna P. Suva, Man, RNReignallienn Inocencio MartinNo ratings yet
- EST110-Dec 2021 Q&ADocument14 pagesEST110-Dec 2021 Q&ASreejith S NairNo ratings yet
- 17 - MiG-19 Day Interceptor & Two-Seat VariantsDocument47 pages17 - MiG-19 Day Interceptor & Two-Seat VariantsEduardoFadul100% (1)
- Sample Theory With Ques. - Organometallic Compounds (NET CH UNIT-3) PDFDocument26 pagesSample Theory With Ques. - Organometallic Compounds (NET CH UNIT-3) PDFPriyanshi VermaNo ratings yet
- Previews 2502414 PreDocument9 pagesPreviews 2502414 PreAlex Andre RojasNo ratings yet
- Fluidization - Expansion Equations For Fluidized Solid Liquid Systems (Akgiray and Soyer, 2006)Document10 pagesFluidization - Expansion Equations For Fluidized Solid Liquid Systems (Akgiray and Soyer, 2006)Moisés MachadoNo ratings yet
- Lower Motor Neuron LesionsDocument29 pagesLower Motor Neuron LesionsLoshi ChandrasekarNo ratings yet
- Iaph LNG Bunker Checklist Bunker Station To Ship Final v3.6 Incl GuidelinesDocument26 pagesIaph LNG Bunker Checklist Bunker Station To Ship Final v3.6 Incl Guidelines서창빈No ratings yet
- Fundamentals of Ship Maintenance and Repair For Future Marine Engineers PDFDocument11 pagesFundamentals of Ship Maintenance and Repair For Future Marine Engineers PDFShawn Wairisal100% (2)
- PB Alumec EnglishDocument12 pagesPB Alumec EnglishByron RodriguezNo ratings yet
- Frequency Adverbs Worksheet - Basic 02 IntensiveDocument2 pagesFrequency Adverbs Worksheet - Basic 02 IntensiveMorelia AlfaroNo ratings yet